Метод обратных преобразований
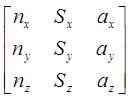
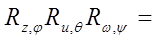
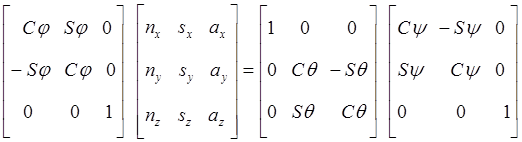
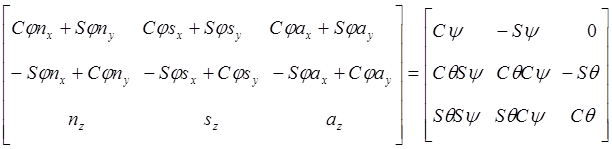
Задача состоит в том, чтобы, зная трехмерную матрицу поворота и учитывая равенство (2-2), представляющее собой выражение этой матрицы через углы Эйлера:
 =
= 
 , (6-8)
, (6-8)
где  и
и  ,
,
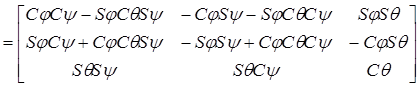
определить соответствующие значения углов  Записывая это матричное уравнение в форме уравнений для отдельных элементов, получим:
Записывая это матричное уравнение в форме уравнений для отдельных элементов, получим:
 ; (6-9а)
; (6-9а)
 ; (6-9б)
; (6-9б)
 ; (6-9в)
; (6-9в)
 ; (6-9г)
; (6-9г)
 ; (6-9д)
; (6-9д)
 ; (6-9е)
; (6-9е)
 ; (6-9ж)
; (6-9ж)
 ; (6-9з)
; (6-9з)
 . (6-9и)
. (6-9и)
Из уравнений (6-9и), (6-9е) и (6-9з) получаем, что решение всей системы уравнений (6-9а) – (6-9и) имеет следующий вид:
 , (6-10)
, (6-10)
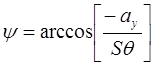
 , (6-11)
, (6-11)
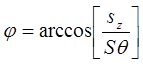
 . (6-12)
. (6-12)
Полученное решение неустойчиво и плохо обусловлено по следующим причинам:
1. Функция arccos неудобна тем, что точность вычисления ее значения зависит от этого значения.
2. В точках, где sin (  ) принимает близкие к нулю значения, т.е. при »0° или при »180°, равенства (6-11) и (6-12) либо не определены, либо дают низкую точность вычислений.
) принимает близкие к нулю значения, т.е. при »0° или при »180°, равенства (6-11) и (6-12) либо не определены, либо дают низкую точность вычислений.
Более устойчивый способ определения углов Эйлера для вычисления угла , значения которого лежат в пределах -p£ £p, использует функции арктангенса ATAN2(y,x), вычисляющий значение arctg(y/x) с учетом принадлежности аргумента соответствующему квадранту:
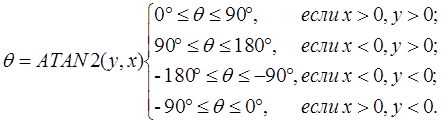 (6-13)
(6-13)
Применяя такую обратную тригонометрическую функцию двух аргументов, рассмотрим общее решение.
Элементы матрицы в левой части матричного уравнения (6-8) заданы, а элементы матриц, стоящих в правой части этого уравнения, неизвестны и зависят от Умножая слева матричное уравнение (6-8) на  , переносим неизвестную
, переносим неизвестную  в левую часть, оставляя в правой неизвестные
в левую часть, оставляя в правой неизвестные  и
и  , и тем самым получаем:
, и тем самым получаем:
 ,
,
или
 .
.
(6-14)
Из равенства элементов (1, 3) (элементов, находящихся на пересечении 1-й строки и 3-го столбца матрицы) в правой и левой частях уравнения (6-14) имеем:
 , (6-15)
, (6-15)
что в свою очередь дает

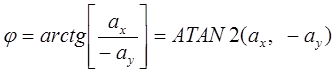 . (6-16)
. (6-16)
Из равенства элементов (1, 1), (1, 2) в правой и левой частях следует:
 , (6-17а)
, (6-17а)
 , (6-17б)
, (6-17б)
что позволяет найти  :
:
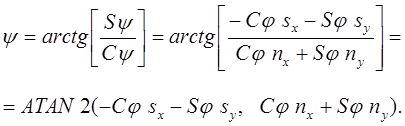 (6-18)
(6-18)
Приравнивая элементы (2, 3), (3, 3) матриц в левой и правой частях уравнения, получаем:
 ,
,
 , (6-19)
, (6-19)
что позволяет найти  :
:
 . (6-20)
. (6-20)
Таким образом, рассмотренный способ состоит в умножении исходного уравнения слева и справа на неизвестную матрицу обратного преобразования. Этот способ дает общий подход к решению обратной задачи кинематики. Но не дает точного ответа, каким образом выбрать из нескольких существующих решений одно, соответствующее требуемой конфигурации манипулятора. В этом вопросе приходится полагаться на интуицию исследователя. Для нахождения решения обратной задачи кинематики по заданной матрице манипулятора более пригодным является геометрический подход, дающий также и способ выбора единственного решения для конкретной конфигурации манипулятора.
Лекция 7
Дата добавления: 2016-05-25; просмотров: 1002;