Адаптивное управление с авторегрессивной моделью
Адаптивное самонастраивающееся устройство управления использует авторегрессивную модель для установления соответствия между входными и выходными параметрами манипулятора (рис. 18.3). Алгоритм управления предполагает, что силы взаимодействия между сочленениями ничтожно малы.
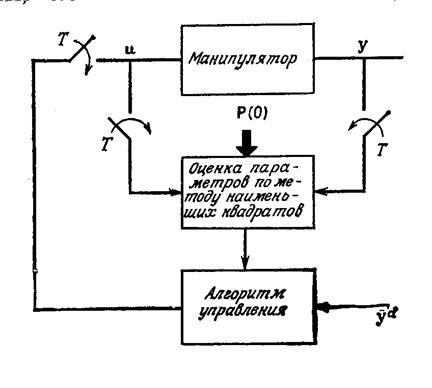
Рисунок 18.3. Адаптивное управление с авторегрессивной моделью
Обозначим входной момент на i-м сочленении через  , а выходное угловое положение манипулятора – через
, а выходное угловое положение манипулятора – через  . Пара входного выходного параметров
. Пара входного выходного параметров  может быть описана авторегрессивной моделью, которая приводит эту пару как можно в более близкое соответствие:
может быть описана авторегрессивной моделью, которая приводит эту пару как можно в более близкое соответствие:
 , (18-12)
, (18-12)
где  - постоянные силы;
- постоянные силы;  - ошибка моделирования (белый шум), не зависящая от
- ошибка моделирования (белый шум), не зависящая от  и
и  ,
,  . Параметры
. Параметры  и
и  определяются таким образом, чтобы получить лучшее совпадение наименьших квадратов измеренной пары параметров входа и выхода. Эти параметры могут быть получены путем минимизации следующего критерия:
определяются таким образом, чтобы получить лучшее совпадение наименьших квадратов измеренной пары параметров входа и выхода. Эти параметры могут быть получены путем минимизации следующего критерия:
 , (18-13)
, (18-13)
где N – число измерений; Е – вероятность выполнения процесса управления.
Лекция 19
Дата добавления: 2016-05-25; просмотров: 1415;