Устройство позиционирования для одного сочленения манипулятора
Назначение устройства позиционирования – управление двигателем таким образом, чтобы реальное угловое перемещение сочленения совпадало с желаемым угловым перемещением, определяемым заданной траекторией. Управление основано на выработке сигнала ошибки между заданным и действительным угловыми положениями сочленения для выработки соответствующего управляющего напряжения. Напряжение на двигателе прямо пропорционально ошибке:
 , (17-1)
, (17-1)
где  -коэффициент передачи обратной связи по положению, В/рад;
-коэффициент передачи обратной связи по положению, В/рад;
 -ошибка системы;
-ошибка системы;
n – передаточное отношение, учитывающее приведение управляющего
напряжения к валу двигателя;
 - желаемое угловое перемещение;
- желаемое угловое перемещение;
 - действительное угловое перемещение.
- действительное угловое перемещение.
При наличии обратной связи система управления из разомкнутой системы, описываемой уравнением (16-22), преобразуется в замкнутую систему управления с помощью блока отрицательной обратной связи (рис. 17.1).
Применяя преобразование Лапласа к уравнению (17-1)
 (17-2)
(17-2)
и подставляя  в уравнение (16-22), получим передаточную функцию разомкнутой системы, связывающей ошибку управляющего сигнала
в уравнение (16-22), получим передаточную функцию разомкнутой системы, связывающей ошибку управляющего сигнала  с текущим положением сочленения:
с текущим положением сочленения:
 . (17-3)
. (17-3)
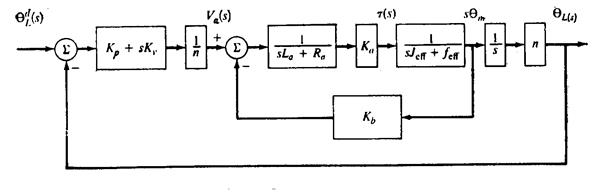
Рисунок 17.1. Управление с обратной связью одним сочленением манипулятора
После нескольких простых алгебраических преобразований можно получить передаточную функцию замкнутой системы, представляющую собой отношение действительного углового перемещения  к желаемому
к желаемому  угловому перемещению:
угловому перемещению:
 (17-4)
(17-4)
Из уравнения (17-4) видно, что пропорциональный регулятор для одного сочленения робота представляет собой систему второго порядка, которая является устойчивой, если все коэффициенты системы положительны. Для того чтобы улучшить динамику системы и уменьшить статическую ошибку, можно увеличить коэффициент передачи обратной связи  и ввести демпфирование в систему путем учета производной от ошибки позиционирования. Угловая скорость сочленения может измеряться тахометром или вычисляться по соответствующим величинам между двумя последовательными положениями сочленения. Тогда управляющее напряжение двигателя будет прямо пропорционально ошибке позиционирования и ее производной, т.е.:
и ввести демпфирование в систему путем учета производной от ошибки позиционирования. Угловая скорость сочленения может измеряться тахометром или вычисляться по соответствующим величинам между двумя последовательными положениями сочленения. Тогда управляющее напряжение двигателя будет прямо пропорционально ошибке позиционирования и ее производной, т.е.:
 , (17-5) где
, (17-5) где  - коэффициент передачи обратной связи по производной от ошибки;
- коэффициент передачи обратной связи по производной от ошибки;
n – передаточное отношение редуктора, учитывающее приведение управляющего напряжения к валу двигателя.
Передаточная функция, связывающая возмущения с действительным перемещением сочленения:
 , (17-6)
, (17-6)
где  - преобразование Лапласа от возмущающих воздействий сил веса и центробежных сил, действующих на звено манипулятора.
- преобразование Лапласа от возмущающих воздействий сил веса и центробежных сил, действующих на звено манипулятора.
Используя уравнение (17-6) и применив принцип суперпозиции, можно получить действительное перемещение сочленения с учетом двух входных воздействий  и в следующем виде:
и в следующем виде:
 . (17-7)
. (17-7)
На рис. 17.2 представлена система управления с обратной связью при наличии возмущений от сил веса и центробежных сил.
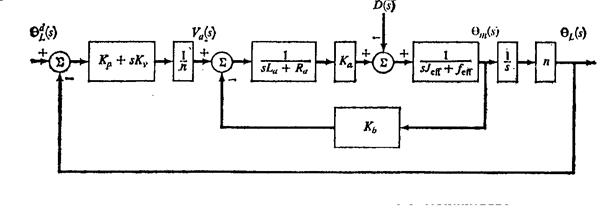
Рисунок 17.2. Блок-схема управления с обратной связью манипулятором
при наличии возмущений
Дата добавления: 2016-05-25; просмотров: 842;