Обыкновенный котелок 127-мм магнитного компаса в разрезе
| |
| |
Картушка, помещенная в котелок, является чувствительным элементом прибора. Состоит из трех пар, укрепленных снизу, магнитных стрелок (магнитные стержни, помещенные в герметические пеналы) и бумажного диска – сверху, разделенного на 32 румба и на градусы от 0 до 359°, через градус. Картушка, вес которой частично компенсируется поддерживающей жидкостью, свободно вращается относительно вертикальной оси, опираясь своим центрам на шпильку.
Нактоуз. Нактоуз обеспечивает поддержание котелка и установки девиационного прибора. В верхней части нактоуза размещен карданов подвес, который обеспечивает горизонтальное положение котелок при качке судна и пружинный амортизатор, сглаживающий воздействие вибрации судна на магнитную стрелку.
Пеленгатор. Пеленгатор устанавливается сверху на котелок компаса и служит для определения направлений на объекты.
13.2. Гирокомпас.
|
| |
| |
| |

Если удерживать главную ось гироскопа в плоскости истинного горизонта, то эта ось совместится с направлением истинного меридиана. Механизм удержания гироскопа в плоскости истинного горизонта таков: вращается гироскоп и вращается Земля. Вследствие суточного вращения Земли вокруг своей оси восточная часть ее опускается, а западная поднимается, и ось гироскопа выходит из плоскости горизонта, не меняя своего положения в пространстве, но отходит от направления на географический полюс. Для того чтобы ось гироскопа вернулась в плоскость истинного горизонта и указывала направление истинного меридиана применено смещение по вертикали вниз центра тяжести системы гироскопа (применен маятниковый тип смещения). Теперь при поднятии оси вращения гироскопа над истинным горизонтом появится плечо силы тяжести, момент которой воздействует на ось гироскопа и заставляет ось поворачиваться к направлению на полюс. Свойство гироскопа таково, что при воздействии на ось вертикальной силы (момент силы тяжести) она прецессирует в направлении перпендикулярному его действию. Так происходит непрерывно. При повышении оси гироскопа над плоскостью горизонта появляется момент силы тяжести, возвращающей ось гироскопа к направлению истинного меридиана. Это уже курсоуказатель (гирокомпас маятникового типа). Гирокомпас обеспечивает высокую точность показаний (0,1°), дистанционную передачу данных ко многим потребителям, автоматическое удержание судна на курсе с помощью авторулевого. Гирокомпас не автономен, так как зависит от электрической сети судна, сложен в техническом исполнении, и все же стал основным курсоуказателем на судне, а магнитный – резервным. На судах используются гирокомпасы: «Курс-М, «Амур-М», гироазимут «Вега» и другие типы. Гирокомпасы Курс и Амур это двух гироскопные приборы с жидкостным подвесом чувствительного элемента (ЧЭ). Они состоят из основного прибора, приборов курсоуказания и агрегатов питания. Основной прибор это:
- чувствительный элемент,
- стол со следящей сферой, в которую помещен ЧЭ,
- корпус в кардановом подвесе,
- резервуар для поддерживающей жидкости,
- воздушное или водяное охлаждения ЧЭ (регулирует температуру поддерживающей жидкости в пределах 39 - 44°С),
- прибор пуска,
- приборы управления,
- приборы сигнализации и контроля работы гирокомпаса.
Следящая сфера, прослеживая положение чувствительного элемента, передает показания на курсоуказатели – репитеры (повторители показаний ЧЭ), устанавливаемые в необходимых местах на судне (в том числе в каюте капитана и на посту аварийного управления рулем), а также самописец курса – курсограф.
Агрегаты питания вырабатывают электроэнергию различного напряжения, частоты и фазности, необходимую для функционирования всей системы гирокомпаса, начиная с гироскопов.
13.3. Лаги – как измерители скорости.
Современные лаги совершенно не похожи на своего предшественника, давшего название скорости на море миле/час – узел.
Многие типы лагов основаны на принципах вращения винта в потоке движущейся жидкости. Частота вращения винта была функцией пройденного расстояния. Вначале это была вертушка, опускаемая за борт и через лаглинь, передавала скорость своего вращения на счетчик количества оборотов, которая преобразовывалась в пройденное судном расстояние в единицу времени. В более позднее время и сейчас применяются, кроме электромеханических, еще и гидродинамические, индукционные и гидроакустические лаги. Они, за исключением гидроакустического, измеряют скорость судна относительно воды, т.е. без учета влияния течения. Механические и электромеханические лаги пересчитывали скорость оборотов вертушки механическим или электрическим путем в пройденной расстояние.
 Гидродинамический лаг, работающий на принципе гидродинамического давления потока воды, обтекающего судно, измеряет скорость движения.
Гидродинамический лаг, работающий на принципе гидродинамического давления потока воды, обтекающего судно, измеряет скорость движения.
|
В днище корпуса установлены две полые трубки - приемники давления. Одна трубка прямая (прием статического давления), а другая изогнутая, в которой принимается полное (статическое и динамическое) давление. Обе трубки соединены с резервуаром, который разделен эластичной диафрагмой на две камеры. Когда судно стоит, давление в обеих частях резервуара одинаковое и диафрагма находится в нейтральном положении.
При движении судна полное давление больше статического (учитывающего только высоту водного столба) и диафрагма изгибается, чем больше, тем выше скорость судна.
Изгиб диафрагмы учитывается преобразующим устройством, которое переводит его в скорость судна. С помощью электрических устройств показания основного прибора передаются на репитеры (повторители).
| |
| |
 | |||
 | |||

 |
|
Напряженность этого поля прямо пропорционально скорости движения судна. Разность потенциалов подается на счетно-решающее устройство, которое определяет скорость судна и пройденное им расстояние. Индукционные лаги используются на многих судах.
Принцип действия гидроакустических лагов основан на использовании эффекта Доплера. Сущность эффекта состоит в том, что приемник фиксирует звуковые или электромагнитные волны большей или меньшей частоты по сравнению с частотой излучателя. Разность излученной и принятой частот получила название доплеровского сдвига частот. Излучатель и приемник звуковых частот размещаются на днище судна. Излучатель посылает ультразвуковые волны в сторону морского дна под определенным углом. При движении судна на скорость распространения ультразвуковой волны будет накладываться скорость судна, которая и определяет величину доплеровского сдвига частоты. По этому сдвигу вычислительное устройство лага определяет скорость движения судна и преобразует ее в пройденное расстояние.
13.4. Измеритель глубины. Ручной лот и эхолот
Ручной лот.
Прибор для измерения глубины - ручной лот (Рис. 54) издавна употреблялся мореплавателями; в настоящее время является запасным инструментом. Ручной лот это гирька и лотлинь с разбивкой длины в метрах. Для измерения глубины гирьку опускают до грунта, а на лотлине смотрят метку у уровня воды, которая показывает длину лотлиня от гирьки (грунта) до поверхности воды. Длина лотлиня 50 метров. Если гирька не достала дна, то лотовый матрос докладывает «50 метров пронесло». Разбивка лотлиня производится с помощью кожаных и цветных матерчатых марок (Рис. 54).
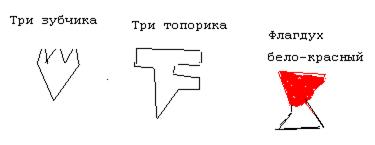
Матерчатые марки вплетаются в трос каждые 10 метров начиная с нулевой отметки у гирьки лота:
10 метров – красная марка (флагдух),
20 метров – синий флагдух,
30 метров - белый флагдух,
40 метров – желтый флагдух и
50 метров – красно-белый флагдух.
Кожаные марки в виде топориков вплетаются в лотлинь каждые 10 метров, начиная с 5 метров.
5 метров – один топорик,
15 метров – два топорика,
25 метров – три топорика,
35 метров – четыре топорика и
45 метров - пять топориков.
Каждый интервал в 5 метров, через один метр маркируется кожаными зубчиками, счет ведется в сторону увеличения длины лотлиня.
6 метров – 1 зубчик,
7 метров – 2 зубчика,
8 метров – 3 зубчика,
9 метров – 4 зубчика. И так каждый интервал 11-14, 16-19, 21-24, 26-29, 31-34, 36-39, 41 – 44, и 46-49 метров.
На больших глубинах применяли глубоководную трубку, которая после опускания в воду с грузом, прикладывается к специальной шкале показывающей глубину погружения. В трубке, в зависимости от глубины погружения (давления жидкости), отмечается уровень проникновения воды в трубку, а по этому уровню определяется глубина погружения. Это лот Томсона (применялся сравнительно редко).
 Два зубчика
Два зубчика
 топорик
топорик

 синий
синий
красный

белый
 |  |  |
желтый

красно-белый
|
Эхолот.
На современном флоте используются измерители глубины называемыми «эхолотами». Принцип работы этого прибора основан на измерении времени прохождения в воде импульса ультразвуковых колебаний от судна до грунта и обратно.
Гидроакустические антенны эхолотов имеют специфическое свойство: при воздействии на них электромагнитного поля, сокращать свои размеры, а при воздействии на них ультразвукового давления создавать электрическое поле.
Это свойство некоторых металлов и кристаллов называют пъезоэлектрическим и магнитострикционным эффектом.
Эхолот работает следующим образом:
Воздействуя на передающую антенну электромагнитным полем, излучаются ультразвуковые волны, которые доходят до грунта (дна), отражаются от него и свои колебания направляют на приемную антенну эхолота, которая преобразует ультразвуковые волны в электрическое поле. Это поле посылает сигнал на решающее устройство, сравнивающее время посылки сигнала со временем прихода, отраженного сигнала, и вырабатывающее показания глубины.
Так как скорость ультразвуковых волн при решающем устройстве введена постоянной (1500 м/сек),
то прибор имеет некоторую погрешность в скорости звука в воде
(меняется температура и соленость воды) и глубина места.
Dн = (1 -  ).
).
13.5. Судовые радиолокационные станции РЛС.
Действие судовых РЛС основано на принципе радиоэха: посылая узконаправленные эхосигналы и принимая их после отражения, можно установить наличие объекта по данному направлению и определить до него расстояние. В момент посылки зондирующего импульса по определенному направлению на Индикаторе Кругового Обзора (ИКО) начинается движение электронного луча от центра экрана по радиусу в том же направлении куда направлен луч. Происходит развертка луча на ИКО синхронно вращению антенны. Скорость движения луча в масштабе экрана в два раза меньше скорости распространения радиоволн. При возвращении отраженного от объекта импульса он усиливается и подается на ИКО. При этом электронный луч развертки, вращаясь синхронно с антенной, последовательно прощупывает окружающее пространство, а на экране рисуется радиолокационное изображение. Оно воспринимается слитно, благодаря свойству длительного послесвечения, которым обладает люминофор, нанесенный на электроннолучевую трубку ИКО. Местность на экране индикатора кругового обзора изображается как на плане. Для измерения направления используется электронный луч, который управляется оператором, а на экране высвечивается направление в градусах кругового счета. Для измерения дистанции используется электронный, подвижный круг дальности, который перемещается по экрану ИКО оператором и на дисплее непрерывно высвечивается дистанция, на которой находится круг дальности от центра ИКО (судна).
Радионавигационные системы определения места судна.
Для дальней навигации, когда место судна определяется в дали от берегов, кроме астрономических методов обсерваций применяются радионавигационные системы, которые представляют собой сложные устройства на берегу, передающие радиоизлучение и приемоиндикаторы этого излучения на судне.
13.6. Гиперболические радионавигационные системы (РНС).
Они делятся на две группы: фазовые и импульсно-фазовые. Все они применяются в настоящее время для нужд навигации. РНС «Декка» среднего радиуса действия (до 350 морских миль) и РНС «Лоран – С» дальнего радиуса действия (до 1500 морских миль). Эти системы можно использовать для обсерваций в любое время суток.
В устройстве приемоиндикатора на судне производится определение разности расстояний до двух береговых радиостанций. Измеренная одинаковая разность расстояний из разных точек определяет закономерность их положения на карте. Линия, на которой одинакова разность расстояний, измеренных до одних и тех же станций, называется изолинией и представляет собой гиперболу. В импульсных РНС разность расстояний вычисляется автоматически по времени прихода импульсного излучения антеннами станций, а в фазовых сравниваются фазы несущих колебаний радиоизлучения. На этой основе вычисляется разность расстояний. Издаются специальные карты с нанесенными на них гиперболами, имеющими оцифровку, соответствующую отсчетам, получаемым на приемоиндикаторе.
13.7. Спутниковые радионавигационные системы (СРНС)
Спутниковая навигационная система предназначена для высокоточного определения места судна в любом районе Мирового океана, в любое время суток, при любых гидрометеорологических условиях с дискретностью, обеспечивающей безопасность мореплавания. Спутниковая РНС включает в себя:
- искусственные спутники Земли (ИСЗ), обращающиеся по выгодно расположенным в пространстве орбитам,
- командно-измерительный комплекс, обеспечивающий работу ИСЗ, и функционирование всей системы в целом,
-  спутниковую навигационную аппаратуру, размещаемую на судне.
спутниковую навигационную аппаратуру, размещаемую на судне.
При пролете в зоне видимости судна, судовой приемоиндикатор принимает от ИСЗ навигационный сигнал fo, позволяющий измерять навигационные параметры. На основе измеренных навигационных параметров: информации о
|
движении ИСЗ, счислимых координат судна, вычисляются обсервованные
координаты. В существующих двух системах спутниковой навигации («Навстар» и «Глонасс») выведены на орбиты по 24 искусственных спутника Земли. Применяются различные методы обсерваций по ИСЗ (дальномерный, радиально-скоростной - дифференциальный, разностно-дистанционный – интегральный). Точность обсервации настолько высока, что в настоящее время эта СРНС является основной для ориентировки на море. Обсервованные координаты места судна практически определяется непрерывно. Такая дискретность дает возможность вычислить фактический путь судна и непрерывно его индицировать, а это равносильно курсоуказателю (магнитному или гироскопическому компасу).
Дата добавления: 2016-05-16; просмотров: 1238;