Структура промышленных роботов
Как следует из определения, приведённого выше, ПР состоит из исполнительного устройства в виде манипулятора и устройства программного управления. На рис. 3.4 представлена одна из конструкций промышленного робота.
Манипулятор ПР предназначен для выполнения двигательных функций при перемещении объектов в пространстве и представляет собой многозвенный механизм с разомкнутой кинематической цепью.
Конструктивно манипулятор состоит из несущих конструкций, исполнительных механизмов, захватного устройства, привода с передаточными механизмами и устройства передвижения.
Устройство управления ПР необходимо для формирования и выдачи управляющих воздействий манипулятору в соответствии с управляющей программой и конструктивно состоит из собственно системы управления, информационно-измерительной системы с устройствами обратной связи и системы связи.
Несущие конструкции служат для размещения всех устройств и агрегатов ПР, а также для обеспечения необходимой прочности и жесткости манипулятора. Несущие конструкции выполняют в виде оснований, корпусов, стоек, рам, тележек, порталов и т. п.
Исполнительный механизм – это совокупность подвижно соединённых звеньев манипулятора, предназначенных для воздействия на объект манипулирования или обрабатываемую среду.
Захватное устройство – конечный узел манипулятора, обеспечивающий захватывание и удержание в определённом положении объекта манипулирования.
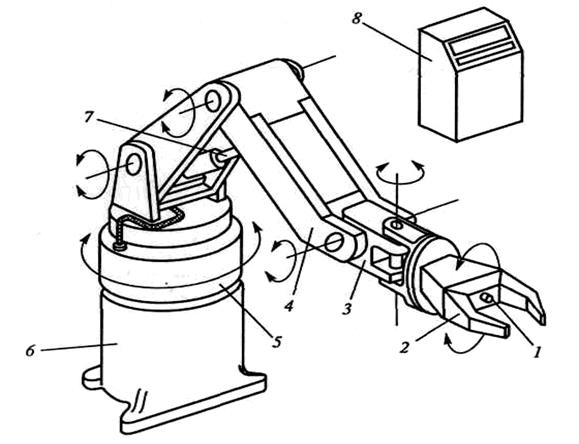
Рис. 3.4. Конструкция промышленного робота:
1 – датчик обратной связи; 2 – захватное устройство; 3 – кисть; 4 – рука манипулятора; 5 – колонна; 6 – несущая конструкция (основание); 7 – привод руки; 8 – блок управляющего устройства с пультом
Принципы действия и конструкции захватных устройств различны и зависят от объекта манипулирования, включая его размеры, форму и физико-химические свойства. Захватные устройства можно классифицировать по следующим признакам: а) по способу захвата и удержания объекта; б) по наличию устройств очувствления. По первому признаку захватные устройства делят на механические, вакуумные, электромагнитные и комбинированные; по второму признаку — на неочувствленные и очувствленные.
Механические захватные устройства состоят из приводного устройства, механизма зажима и захватывающих элементов (губок схвата). По виду используемого привода механические схваты подразделяют на электромеханические, пневматические и гидравлические, а по виду движения губок — на схваты с поступательным и поворотным движениями губок, осуществляемыми соответствующими механизмами зажима.
Вакуумные захватные устройства — это в основном вакуум-присосы, удерживающие предмет за счет разрежения воздуха, создаваемого между поверхностью предмета и вакуум-присосом.
Электромагнитные захватные устройства, основной частью которых являются электромагниты, используют для манипулирования с ферромагнитными предметами.
Схват с электромеханическим приводом приведен на рис. 21.2, а. Плоскопараллельное движение губок 1 и 2 схвата осуществляется с помощью электродвигателя М,зубчатой передачи 4 и передачи винт-гайка 3.
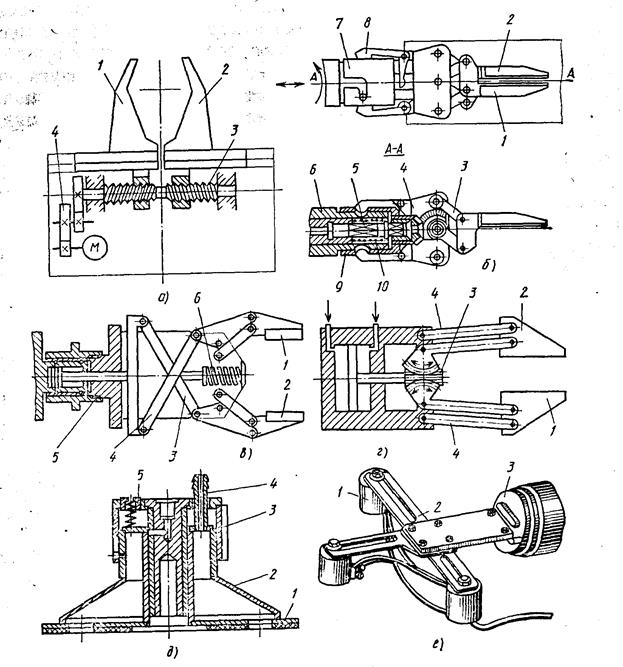
Рис. 21.2. Захватные устройства
У схвата, показанного на рис. 21.2, б,плоскопараллельное движение губок 1 и 2 обеспечивают параллелограммные механизмы 3, которые приводятся в движение от приводного вала 5 с помощью конической передачи 4. Для обеспечения легкосъемности схвата связан с последним звеном 6 манипулятора специальным замком 7. Соединение фиксируется двумя рычажками 8, проходящими через пазы втулки 9 схвата и входящими своими концами в канавки звена 6. Рычажки подпружинены пружинами 10.
Схват с приводом от пневмоцилиндра одностороннего действия представлен на рис. 21.2, в. Губки 1 и 2 схвата через систему рычагов 3 и 4 приводятся в движение с помощью пневмоцилиндра 5, закрепленного на последнем звене манипулятора, и пружины 6,
У схвата с пневмоцилиндром двойного действия (рис. 21.2, г) приводное устройство губок 1 и 2 представляет собой сдвоенную реечную пару 3, связанную с параллелограммными механизмами 4, обеспечивающими плоскопараллельное перемещение губок.
Схват для взятия плоских деталей, выполненный в виде вакуум-присоса изображен на рис. 21.2, д. Разряжение между поверхностью заготовки и резиновой прокладкой 1, приклеенной к чашке 2, создается при отсосе воздуха через штуцер 4. Для компенсации погрешности позиционирования при опускании манипулятора чашка может перемещаться в вертикальном направлении в корпусе 3. Возврат в исходное положение осуществляется пружиной 5.
В электромагнитном схвате (рис. 21.2, е.)три электромагнита 1 закреплены на крестообразном основании 2,которое крепится к звену 3.В основании звена видны пазы, используемые для установки электромагнитов на заданный размер заготовки.
На схватах промышленных роботов, если это необходимо по условиям технологического процесса, устанавливают чувствительные элементы, дающие информацию об объекте и внешней среде, в которой функционирует робот.
Привод предназначен для преобразования подводимой энергии в механическое движение звеньев исполнительного механизма в соответствии с сигналами, поступающими с устройства управления.
Устройство передвижения служит для перемещения манипулятора или ПР в целом в необходимое место рабочего пространства и конструктивно состоит из ходовой части и приводных устройств.
Система управления необходима для непосредственного формирования и выдачи управляющих сигналов и состоит из пульта управления, запоминающего устройства, вычислительного устройства, блоков управления приводами манипулятора и технологическим оборудованием.
Информационно-измерительная система предназначена для сбора и первичной обработки информации для системы управления ПР, включает в себя устройство обратной связи, устройство сравнения сигналов и датчики обратной связи.
Систему связи используют для обеспечения обмена информацией между ПР и оператором или другими роботами и технологическими устройствами с целью формулировки заданий, контроля за функционированием систем ПР и технологического оборудования, диагностики неисправностей, регламентной проверки и т.п.
Дата добавления: 2016-03-15; просмотров: 3165;