Измерение неэлектрических величин
Основные понятия и классификация
Среди физических величин, подлежащих измерению, значительную часть составляют неэлектрические величины. Электрические средства измерений таких величин имеют ряд существенных достоинств и применяются весьма широко. К достоинствам относятся возможность проведения дистанционных, в том числе автоматических, измерений, представление результатов измерения в удобной форме, способность регистрировать быстро меняющиеся величины. В таких СИ измеряемая величина предварительно преобразовывается в электрическую величину с помощью первичного измерительного преобразователя (датчика). Сигнал с датчика после усиления и преобразования может выводиться на устройство отображения результатов измерения непосредственно в единицах измеряемой неэлектрической величины (температуры, силы, перемещения и т. п.).
Рассмотрим наиболее распространенные варианты классификации измерительных преобразователей.
1. Измерительные преобразователи могут быть параметрическими и генераторными.
Генераторный преобразователь не нуждается в дополнительном источнике энергии, он преобразует энергию внешнего сигнала в выходной сигнал: ЭДС или заряд. Примерами генераторных преобразователей являются термопары, фотодиоды, пьезоэлектрические чувствительные элементы.
Параметрический преобразователь для своей работы требует внешней энергии возбуждения. Чувствительный элемент такого преобразователя меняют свои характеристики под действием измеряемой величины. Тем самым параметрический преобразователь модулирует сигнал возбуждения, и эта модуляция несет в себе информацию об измеряемой величине. Например, электрическое сопротивление термистора зависит от температуры. Значение сопротивления отражает измеряемую температуру, которая может быть найдена по известным зависимостям. Чтобы преобразовать сопротивление в электрическое напряжение термистор подключают к источнику тока (сигнала возбуждения).
2. По роду измеряемой величины измерительные преобразователи подразделяют на: преобразователи температуры, преобразователи силы, преобразователи давления, преобразователи геометрических размеров и т. д.
3. По принципу преобразования измерительные преобразователи подразделяют на два основных типа:
- прямого преобразования в непрерывный электрический сигнал;
- основанные на принципе компенсации (уравновешивания).
Структурная схема средства измерений прямого преобразования приведена на рис. 1.1. Здесь все преобразования производятся в прямом направлении от входа к выходу, т. е. предыдущие величины преобразуются в последующие и отсутствует преобразование в обратном направлении.

Рис. 1.1. Структурная схема средства измерений прямого преобразования
Здесь К1, К2 ... Кn – коэффициенты преобразования соответствующих звеньев. Предположим, что коэффициенты преобразования не зависят от уровня сигнала, т.е. звенья считаются линейными. Очевидно, что коэффициент преобразования измерительного прибора

и уравнение измерительного преобразования имеет вид
Отсюда следует, что на работу прибора прямого преобразования будут оказывать влияние неточность и нестабильность коэффициента преобразования каждого звена, а так же помехи и наводки, появляющиеся на выходе любого из звеньев в цепи преобразования.
 (1.5)
(1.5)

Для прибора прямого преобразования, имеющего п звеньев, выражение (1.5) можно переписать в виде
(1.6)
Как видно из (1.6) относительные мультипликативные погрешности звеньев суммируются, а аддитивные помехи сказываются тем меньше, чем дальше от входа по цепи преобразований они появляются, и чем больше коэффициент преобразования звеньев (особенно важно иметь большой коэффициент преобразования первого звена).
В СИ часто используется дифференциальная схема прямого преобразования (рис. 1.2). В этом случае преобразователь включает в себя дифференциальное звено ДЗ с двумя выходами, два канала преобразования (П1, П2) и вычитающее устройство ВУ. При изменении входной измеряемой величины х относительно начального значения х0, выходные величины дифференциального звена получают приращения с разными знаками относительно начального значения, преобразуются в электрические величины y1 и у2 и вычитаются. В результате выходная величина преобразователя оказывается пропорциональной приращению Δх измеряемой неэлектрической величины. Такое преобразование имеет меньшую аддитивную погрешность, меньшую нелинейность функции преобразования и большую чувствительность по сравнению с прямым преобразованием.
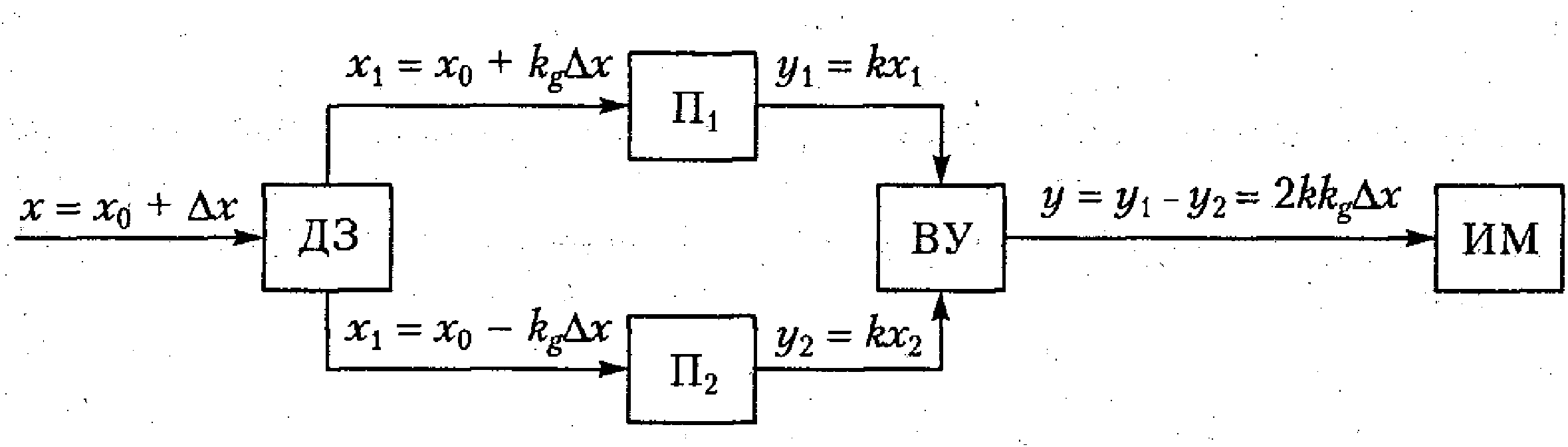
Рис. 1.2. Структурная схема средства измерений прямого
преобразования, построенного по дифференциальной схеме
Например, дифференциально-трансформаторный преобразователь (рис ).
Рис. Схема Дифференциально-трансформаторного
преобразователя перемещения
Часто используется схема, когда измеряемая величина воздействует только на канал 1, во втором канале Δх =0. В этом случае пассивный канал 2, идентичный активному каналу 1, позволяет устранить начальный сигнал на выходе СИ и в значительной мере скомпенсировать температурную, временную и некоторые другие погрешности.
Структурная схема СИ уравновешивающего (компенсационного)преобразования приведена на рис. 1.2.
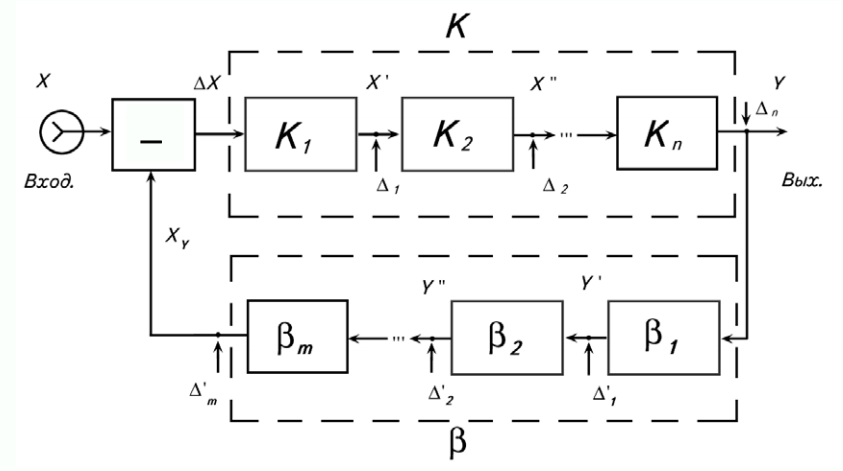
Рис. 1.3
Данная схема имеет цепь прямого преобразования (верхняя) и обратного преобразования (нижняя). Выходная величина цепи прямого преобразования У с помощью цепи обратного преобразования преобразуется в величину Ху, однородную с входной величиной X и почти полностью её уравновешивает. В результате чего на вход цепи прямого преобразования поступает только небольшая часть преобразуемой входной величины ΔХ, т.е. используется отрицательная обратная связь.
У приборов уравновешивающего преобразования возможны два режима работы: режим неполного уравновешивания (ΔХ ≠ 0, но достаточно малая величина) и режим полного уравновешивания (ΔХ = 0). Для структурной схемы (рис. 1.3) получим уравнение измерительного преобразования в виде Y = КУПХ, где Куп – коэффициент преобразования прибора уравновешивающего преобразования.
При βK≫1 цепь прямого преобразования слабо влияет на работу прибора.
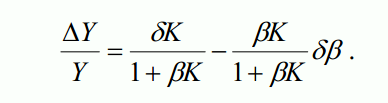
Относительная мультипликативная погрешность измерительного преобразования с уравновешиванием
где β и K – коэффициенты преобразования цепей прямого и обратного преобразования.
У приборов уравновешивающего типа погрешность от нестабильности коэффициента преобразования цепи прямого преобразования (К) уменьшается в (1+/βK) раз. Следовательно, в прямой цепи можно использовать нестабильные активные преобразователи (усилители). Нелинейность цепи прямого преобразования можно рассматривать также как изменение коэффициента преобразования К относительно некоторого номинального значения. Полученное уравнение показывает, что нелинейность цепи прямого преобразования уменьшается также в (1+/βK) раз. Погрешность, обусловленная нестабильностью коэффициента цепи обратного преобразования β, как следует из (1.12), практически полностью входит в погрешность измерительного преобразования прибора. Следовательно, коэффициент обратного преобразования должен иметь высокую стабильность.
Аддитивная погрешность измерительного преобразования прибора никак не зависит от глубины обратной связи и, следовательно, не может быть уменьшена использованием схемы уравновешивающего преобразования.
При полном уравновешивании ΔХ = 0. Это возможно в измерительных устройствах с ручным уравновешиванием, а также в автоматических устройствах, если в цепи прямого преобразования имеется интегрирующее звено.
Уравнение измерительного преобразования для этого случая запишется в виде
Y = X/β. (1.14)
То есть коэффициент преобразования прибора в этом случае полностью определяется цепью обратного преобразования и не зависит от цепи прямого преобразования.
По структурным схемам, приведенным на рис. 1.1 и рис. 1.2 могут строиться как аналоговые, так и цифровые измерительные приборы.
При третьем варианте преобразования (рис. 15.2) в узле сравнения преобразователя происходит сопоставление однородных измеряемой и изменяемой, создаваемой узлом обратной связи, величин до их полного уравновешивания. В качестве узла обратной связи используют преобразователь электрической величины в неэлектрическую (электромеханический преобразователь и др.). Применение метода уравновешивания (компенсации) повышает точность измерения, быстродействие и уменьшает потребление энергии от объекта исследования.
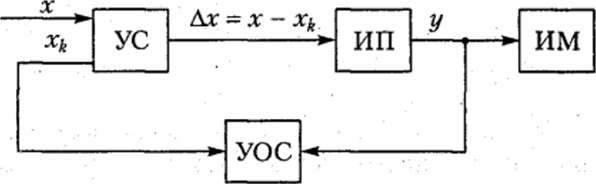
Рис. 15.2. Блок-схема компенсационного измерительного преобразователя
Дата добавления: 2016-02-13; просмотров: 2322;