Мостовая схема с резистивным датчиком
Как правило, резистивный датчик включаются в одно из плеч моста, что позволяет устранить начальное значение сигнала (рис. 2.3, а). На одну из диагоналей моста подается напряжение питания E0, с другой диагонали снимается выходной сигнал, пропорциональный изменению сопротивления Rх. Равновесие моста характеризуется отсутствием разности потенциалов в измерительной диагонали моста (отсутствием тока в цепи нулевого индикатора И). Условие равновесия моста – равенство произведений сопротивлений резисторов противоположных плеч моста:
RxR2 = R1R3.
Зная значения сопротивлений R1, R2, R3 можно определить значение неизвестного сопротивления:
Rx = R1R3/R2.
Различают уравновешенные и неуравновешенные мостовые схемы. Уравновешенный мост имеет один или несколько резисторов, сопротивление которых может целенаправленно изменяться (вручную или автоматически), чтобы добиться равновесия. Уравновешенные мосты обладают более высокой точностью, чем неуравновешенные.
Неуравновешенный мост используется для преобразования изменения сопротивления Rтв напряжение. При настройке системы производят первоначальное уравновешивание моста, например путем изменения R3, что компенсирует разбаланс, вызванный сопротивлением проводов линии связи rл.с.
Мостовая схема (мост Уитстона) показана на рис. 2. Данная схема была предложена английским физиком Чарльзом Уитстоном в 1843 г.
Здесь es, Rs – эдс и внутреннее сопротивление источника питания, Rd – входное сопротивление прибора, измеряющего ток или напряжение разбаланса в диагонали моста. Мост находится в равновесии при условии UA = UB, в этом случае id = 0.
Условие равновесия моста
R1R4 = R2R3.
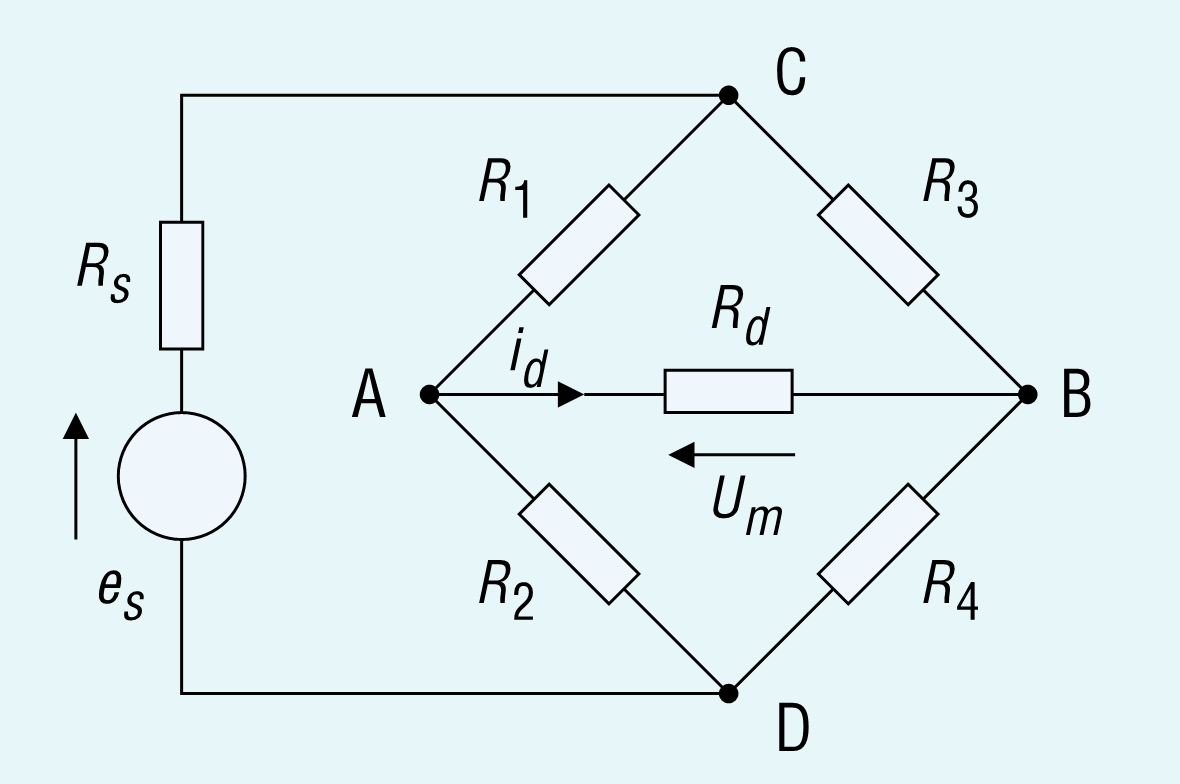
Рис. Мостовая схема
Важным является то, что условие равновесия моста не зависит от внутреннего сопротивления источника питания.
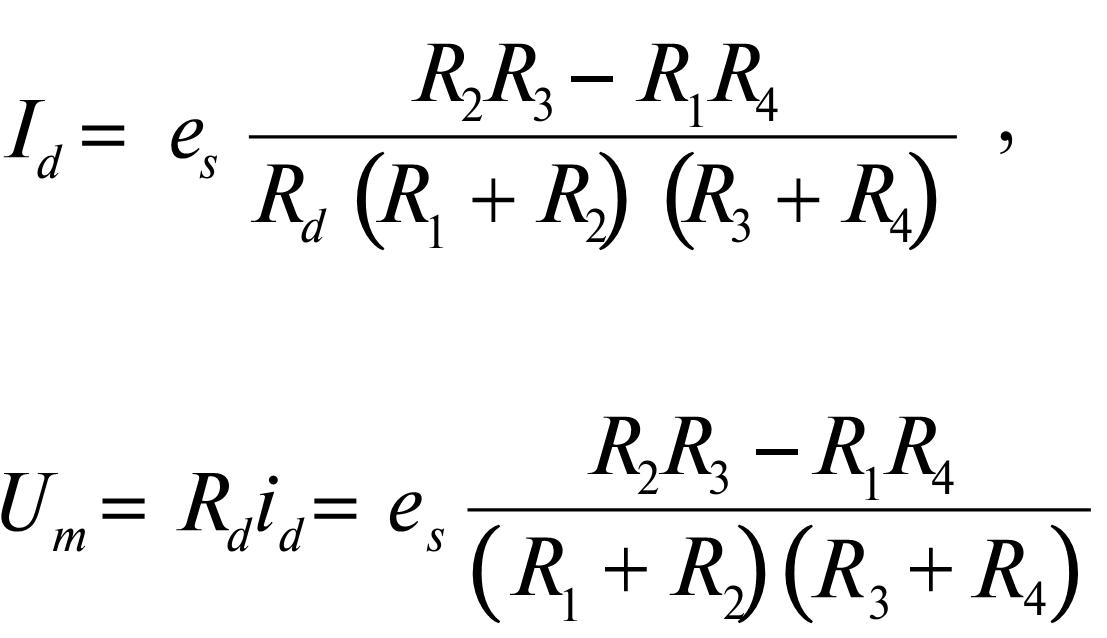
При условии малого сопротивления источника питания (источник напряжения) и высокого входного сопротивления измерительного прибора выражения для тока и напряжения в диагонали моста примут вид:
Эти выражения являются базовыми для мостовой схемы включения резистивного датчика. Чувствительность моста максимальна при R1 = R2 и R3 = R4, но для упрощения измерений чаще всего сопротивления во всех плечах моста выбираются одинаковыми: R1 = R2 = R3 = R4 = R0.
На малом участке характеристики, при равенстве сопротивлений моста значению R0 их приращения малы и выходная характеристика линейна с точностью до величин второго порядка и имеет вид:
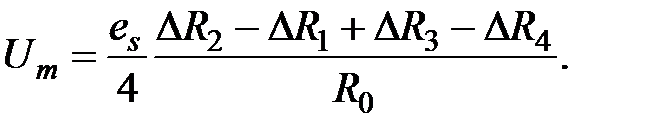 (1)
(1)
Таким образом, для достижения линейной характеристики мостовой схемы должны использоваться малые относительные приращения сопротивлений плеч моста ΔRi.
Другой вариант – линеаризация характеристики за счет дифференциального включения датчиков в соответствующие плечи моста. Равенство сопротивлений плеч моста и попарно противоположные и равные по величине изменения сопротивлений смежных плеч схемы приводят к линейности выходной характеристики. Дифференциальное включение датчиков позволяет линеаризовать выходную характеристику измерительного моста даже в случае нелинейности характеристик датчиков, однако полностью компенсировать воздействие влияющих величин (чаще всего температуры) такая схема не позволяет.
Примером использования описанной линеаризации является тензодатчик с четырьмя рабочими плечами, в котором тензорезисторы R2, R3 работают на растяжение (увеличивают сопротивление), а R1, R4 – на сжатие (уменьшают сопротивление).
Дифференциальное включение помимо линеаризации, пропорционально увеличивает уровень выходного сигнала моста. При прочих равных условиях мост с четырьмя рабочими плечами имеет в 4 раза больший уровень выходного сигнала, чем мост с одним рабочим плечом:
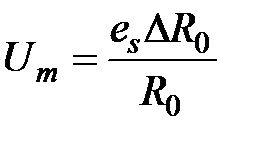 – четыре рабочих плеча;
– четыре рабочих плеча;
 – два рабочих плеча;
– два рабочих плеча;
 – одно рабочее плечо.
– одно рабочее плечо.
В приведенных формулах принято: ΔR1 = ΔR2 = ΔR3 = ΔR4 = ΔR0.
Из формулы (1) вытекает одно очень важное свойство мостовой схемы: идентичные изменения сопротивлений в смежных плечах не приводят к разбалансу моста. Данное свойство используется для компенсации влияющих величин, например температурного изменения сопротивлений тензорезисторов, температурных изменений сопротивлений подводящих проводов. Для компенсации влияющей величины в одном плече мостовой схемы используется датчик, подвергающийся воздействию только этой величины, в смежном плече на датчик воздействуют как измеряемая величина, так и влияющий фактор.
Например, в тензодатчиках при деформациях одного знака, применяют два рабочих тензорезистора R1, R4 и два идентичных компенсационных тензорезистора R2, R3. Компенсационные тензорезисторы не подвергаются деформации и служат для снижения влияния температуры.
Дата добавления: 2016-02-13; просмотров: 9036;