Бесступенчатое регулирование скорости
Бесступенчатое регулирование скорости с помощью двигателей постоянного тока (ДПТ) широко используется в станках с ЧПУ.
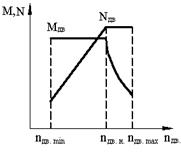 Рис. У.15. График двухзонного
регулирования ДПТ
Рис. У.15. График двухзонного
регулирования ДПТ
| Применяемые ДПТ имеют двухзонное регулирование (рис. У.15): в диапазоне от минимальной (nдв.min) до номинальной (nдв.н) частоты вращения двигатель работает с постоянным крутящим моментом (Mдв = const) и полной мощности не развивает, а при частотах от номинальной до максимальной (nдв.max) – работает с постоянной мощностью (Nдв = const).
Например, если nдв.min, nдв.н и nдв.max составляют соответственно 190, 1200 и 3000 об/мин, то диапазоны регулирования ДПТ будут:
- при постоянной мощности Ддв.N= nдв.max/ nдв.н= 2,5;
- при постоянном моменте Ддв.M= nдв.н/ nдв.min= 6,3  2,52= 2,52=  ;
- полный Ддв.= nдв.max /nдв.min= 15,6 2,53 = Д3дв.N = = Ддв.M× Ддв.N.
Диапазоны регулирования двигателя в целом и с постоянной мощностью составляют весьма ограниченные величины, гораздо меньшие, чем это требуется в приводах универсальных станков. ;
- полный Ддв.= nдв.max /nдв.min= 15,6 2,53 = Д3дв.N = = Ддв.M× Ддв.N.
Диапазоны регулирования двигателя в целом и с постоянной мощностью составляют весьма ограниченные величины, гораздо меньшие, чем это требуется в приводах универсальных станков.
|
Обычно в станках Д до 200-250, но передачи полной мощности на низших частотах (до 1/4 - 1/3 диапазона по числу частот вращения, обозначим эти величины через 1/t) не требуется, на средних же и высших частотах необходимо обеспечивать передачу полной мощности, а значит, и её постоянство.
Чтобы удовлетворить этим требованиям, используют вместе с регулируемым двигателем коробку скоростей (диапазонов, переключений) на малое число вариантов zкc (2; 3; 4).
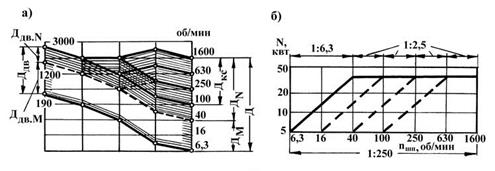
Рис. 3.9. Варианты диаграммы частот вращения (а) и диаграммы мощности (б)
для привода бесступенчатого регулирования скорости шпинделя станка с ЧПУ
Вариант привода бесступенчатого регулирования с коробкой скоростей на 4 варианта (zкc= 4) показан на рис. 2.12,а, а возможная ДЧВ для него – на рис. 3.9,а. На ДЧВ обозначены через Д, ДМ и ДN диапазоны регулирования привода соответственно полный, с М = сonst и с N = сonst.
Обозначим Ддв.N = j. По аналогии со ступенчатым регулированием будет (см. рис. 3.9,a):


|
По последнему выражению можно определить zкс , необходимое для обеспечения требуемого Д при выбранном электродвигателе, т.е. при известных Ддв.M и Ддв.N.
В варианте привода с ДЧВ по рис. 3.9,а обеспечивается  и
и  Диаграмма мощности в диапазоне Д=250, возможная для рассматриваемого привода, показана на рис. 3.9,б.
Диаграмма мощности в диапазоне Д=250, возможная для рассматриваемого привода, показана на рис. 3.9,б.
В связи с тем, что в каталогах электродвигателей nдв.min обычно не указывается, можно вести проектирование привода по следующей методике:
1) Выделяя условно в диапазоне частот вращения шпинделя  геометрический ряд из z значений со знаменателем
геометрический ряд из z значений со знаменателем  , определяют
, определяют  (полученное число округлять до целого не следует);
(полученное число округлять до целого не следует);
2) Определяют частоту вращения шпинделя n, начиная с которой и выше должна передаваться полная мощность,  , где
, где  – третья, четвертая или иная принимаемая часть диапазона частот вращения шпинделя (по числу его ступеней z), в которой передача полной мощности не требуется;
– третья, четвертая или иная принимаемая часть диапазона частот вращения шпинделя (по числу его ступеней z), в которой передача полной мощности не требуется;
3) Определяют  ;
;
4) Определяют  (полученное число округляется до целого; если это делается в сторону уменьшения, диапазон обеспечиваемых частот вращения шпинделя будет иметь разрывы);
(полученное число округляется до целого; если это делается в сторону уменьшения, диапазон обеспечиваемых частот вращения шпинделя будет иметь разрывы);
5) Определяют  , затем
, затем  , если это требуется для справки или для построения ДЧВ.
, если это требуется для справки или для построения ДЧВ.
Примечания.
1 Для удобства построения ДЧВ шкалу частот вращения валов целесообразно выполнять со знаменателем, меньшим  ; его можно, например, принять любым из табл. 3.6 (чтобы можно было воспользоваться этой таблицей) или равным
; его можно, например, принять любым из табл. 3.6 (чтобы можно было воспользоваться этой таблицей) или равным  , где а равно 2, 3, 4, ... . В последнем случае, возможно, значения ряда придётся рассчитать; совпадение или несовпадение этих значений со стандартными не является принципиальным т.к. проектируется привод с бесступенчатым регулированием.
, где а равно 2, 3, 4, ... . В последнем случае, возможно, значения ряда придётся рассчитать; совпадение или несовпадение этих значений со стандартными не является принципиальным т.к. проектируется привод с бесступенчатым регулированием.
2 Строго говоря, в станках с ЧПУ регулирование частот вращения шпинделя в реальности осуществляется ступенчато с малым знаменателем (равным, например, 1,03; 1,015), но поскольку при этом различие между соседними частотами весьма мало, а число частот велико (70-100 и более), то ступенчатостью пренебрегают и считают регулирование бесступенчатым.
Кроме приводов с ДПТ в станках используются приводы, имеющие асинхронные электродвигатели с частотным регулированием. В таких приводах также применяются коробки скоростей на малое число вариантов с теми же целями.
[1] Схватывание – соединение плотно прижатых одна к другой поверхностей в результате действия молекулярных сил. Происходит при недостаточном смазывании сопряжённых поверхностей и большом давлении; опасность схватывания возрастает при высоких скоростях скольжения, когда температура трущихся поверхностей значительно повышается. Из-за схватывания трущихся поверхностей происходит т.н. молекулярно-механический износ.
[2] Здесь и далее в смысле "зубчатое колесо" используются слова "шестерня" и "колесо" без придания им каких-либо различающих смысловых нюансов.
[3] Не путать с КПД!
Дата добавления: 2016-02-20; просмотров: 3619;