Приводы с переборами (ступенями возврата)
Для увеличения редукции и диапазона регулирования в качестве последней множительной группы часто используют перебор (см. рис. 2.3,г и 2.11,а,б).
Поскольку перебор обычно имеет две последовательные замедляющие передачи, то для него может быть imin=1/16, а т.к. imax=1, то диапазон регулирования перебора

Решение последнего выражения для ряда значений xmax дано на рис. 3.3,в.
Поскольку перебор (ступень возврата) "возвращает" движение на ту же ось (на выходной вал, соосный с входным), то структурные сетки приводов с переборами строятся несимметрично.
Для приводов по рис. 2.11 структурные сетки представлены на рис. 3.3. Проанализируем их:
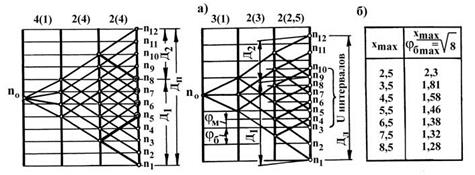
а) привод на 12 вариантов с одинарным перебором (см. рис. 2.11,а и 3.3,а)

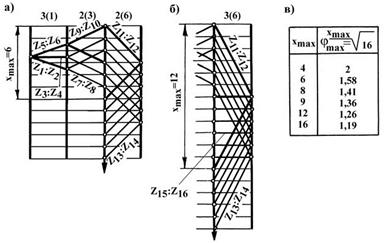 Рис. 3.3. Варианты структурныхсеток приводов с переборами одинарным (а) и двойным (б) и таблица для определения φmax (в)
Рис. 3.3. Варианты структурныхсеток приводов с переборами одинарным (а) и двойным (б) и таблица для определения φmax (в)
| Нормальная множительная структура на 12 вариантов обеспечивает значительно меньший диапазон:
 б) привод на 18 вариантов с двойным перебором (см. рис. 2.11,б и 3.3,б)
б) привод на 18 вариантов с двойным перебором (см. рис. 2.11,б и 3.3,б)

 В данном случае не обеспечивается выигрыша по диапазону в сравнении с нормальной множительной структурой
В данном случае не обеспечивается выигрыша по диапазону в сравнении с нормальной множительной структурой  для которой для которой  также.
Этот пример показывает, что не всякое решение даёт выигрыш, и всегда следует делать сравнительный анализ возможных вариантов. также.
Этот пример показывает, что не всякое решение даёт выигрыш, и всегда следует делать сравнительный анализ возможных вариантов.
|
При желании из каких либо соображений применить двойной перебор и допустимости меньшего числа вариантов структура, к примеру, 9=3(1)·3(3) лучше аналогичной нормальной.
Для нее  в то время как нормальная структура допускает
в то время как нормальная структура допускает  что по величине обеспечиваемого диапазона значительно хуже.
что по величине обеспечиваемого диапазона значительно хуже.
Определение чисел зубьев колёс, образующих перебор, следует производить с учётом того, что модули передач перебора могут быть различными вследствие сильной редукции, осуществляемой первой передачей, и обусловленного этим значительного увеличения крутящего момента, передаваемого второй парой колёс. Модули обеих передач можно принять и одинаковыми за счёт более высокого качества материалов второй пары колёс или увеличения длины их зубьев.
3.9.6.2 Приводы с перекрытием (повторением) части ступеней скорости шпинделя
Для обеспечения перекрытия части ступеней скорости характеристику последней множительной группы уменьшают на несколько единиц.
Рассмотрим получение структур с перекрытием при pk=2 на следующем примере.
В структуре z = 16 = 4(1)·2(4)·2(8) с Д = 31,5 (т.к.  то при φ = 1,26 обеспечивается
то при φ = 1,26 обеспечивается  ) вместо xk= 8 примем xk.пер= 4 и рассмотрим построенную для этого случая структурную сетку (рис. 3.4).
) вместо xk= 8 примем xk.пер= 4 и рассмотрим построенную для этого случая структурную сетку (рис. 3.4).
Как видно, каждая из ступеней n5–n8 получается двумя комбинациями передач, в результате различных частот вращения фактически обеспечивается zф = z – zпер = 16 – 4 = 12, где zпер – количество перекрытых частот вращения.
Развернутую структурную формулу можно представить в виде:
zф=12=4(1)·2(4)·2(4).
Диапазон регулирования привода с перекрытием:
 или (см. рис. 3.4)
или (см. рис. 3.4) 
Приравняв показатели степеней в первом и втором выражениях, получим
zф = 0,5z + xk.пер, откуда xk.пер = zф – 0,5z и z = 2(zф – xk.пер).
Для структур с перекрытием φmax следует определять в последней (k-той) и предпоследней (k–1) множительных группах и принимать φ не превосходящим меньшего из двух полученных значений φmax.
В рассматриваемом случае xmax (k) = xmax (k-1) = 4,  и при φ =1,58 обеспечивается диапазон регулирования частот вращения шпинделя
и при φ =1,58 обеспечивается диапазон регулирования частот вращения шпинделя 
Нормальная множительная структура на 12 вариантов z=12=3(1)·2(3)·2(6) (см. рис. 2.10) допускает  и при φ =1,41 обеспечивает
и при φ =1,41 обеспечивает 
Как видно, структура с перекрытием обеспечивает диапазон регулирования в 3,5 раза больший при тех же 12 фактических вариантах. Для этого потребовалось усложнить конструкцию по рис. 2.10 всего на одну передачу.
Для обеспечения в структуре с перекрытием максимального диапазона при заданных z и кинематической схеме следует принять φ =φmax при хk.пер = xmax (k-1). При этом, если φmax не равно какому-либо стандартному значению, то, приняв стандартное φ<φmax, следует проверить возможность увеличения хk.пер по формуле  полученной из выражения
полученной из выражения  (см. п/п. 3.9.1.7) для данного случая.
(см. п/п. 3.9.1.7) для данного случая.
Покажем в качестве примера, как спроектировать структуры с максимальными диапазонами на базе приводов 12=3·2·2 и 24=4·3·2:
а) zф=3(1)·2(xk-1)·2(xk.пер.), zф=3(1)·2(3)·2(xk.пер.), т.к. pk-1 =2, xmax (k-1)=xk-1=3, то принимаем xk.пер =xmax (k-1) =3.
Тогда  zф=12/2+3=9 и 9=3(1)·2(3)·2(3). При φ =2
zф=12/2+3=9 и 9=3(1)·2(3)·2(3). При φ =2 
б) zф=4(1)·3(xk-1)·2(xk.пер), zф=4(1)·3(4)·2(xk.пер.),
т.к. pk-1  2, то xmax (k-1) = (pk-1–1) ·xk-1=(3–1)·4=8 и xk.пер=xmax(k-1)=8.
2, то xmax (k-1) = (pk-1–1) ·xk-1=(3–1)·4=8 и xk.пер=xmax(k-1)=8.
Тогда  zф=24/2+8=20. При φ =1,26
zф=24/2+8=20. При φ =1,26  Если принять xk.пер=lg8/lg1,26
Если принять xk.пер=lg8/lg1,26  9, то zф=24/2+9=21=4(1)·3(4)·2(9) и
9, то zф=24/2+9=21=4(1)·3(4)·2(9) и 
Из всех возможных структур с перекрытием максимальный диапазон обеспечивают:
| при φ =1,26: | z =36; | zф =27; | Дп.max≈400; |
| при φ =1,41: | z =24; | zф =18; | Дп.max≈360; |
т.е. диапазон может быть увеличен примерно в 8 раз по сравнению с тем, какой обеспечивается нормальной множительной структурой.
Использование структур с перекрытием позволяет строить приводы практически на любые числа вариантов (10, 11,13, 14, 15, 17 и т.п.).
| Рис. 3.4. Структурная сетка привода с перекрытием части ступеней скорости на 12 вариантов | Рис. 3.5. Структурная сетка привода на 12 вариантов с составным (ломаным) геометрическим рядом (а) и таблица для определения φб.max (б) |
Дата добавления: 2016-02-20; просмотров: 2520;