Методы математического описания и структурные схемы САР
Теория автоматического регулирования сформировала единый подход к анализу и синтезу систем различной физической природы (систем механических, электрических, гидравлических, акустических и т.д.) Основан он на математическом описании основных элементов САР, включающем и сами объекты регулирования.
При этом математическое описание САР представляется в виде уравнения, левая часть которого включает в себя члены, описывающие внутренние (собственные) свойства элементов, управляемые сигналы и их производные.
Правая часть уравнений содержит управляющие и внешние воздействия и их производные.
 ,
,
где  - оператор, описывающий внутренние свойства САР или отдельного элемента;
- оператор, описывающий внутренние свойства САР или отдельного элемента;
 - оператор внешних управляющих воздействий на систему или отдельный элемент.
- оператор внешних управляющих воздействий на систему или отдельный элемент.
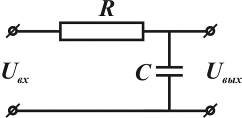
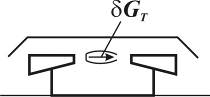
Математическое описание движения объектов управления и регуляторов составляется на основе физических законов, определяющих протекающие процессы. Уровень сложности этого описания может быть совершенно различным. Так, например, электрическая цепь, представленная на рисунке 1.3,а и газотурбинный двигатель на рисунке 1.3,б могут быть описаны одинаковыми дифференциальными управлениями:
 - для электрической цепи; (1.1)
- для электрической цепи; (1.1)
 - для газотурбинного двигателя. (1.2)
- для газотурбинного двигателя. (1.2)
| 
|
| а) | б) |
| Рисунок 1.3 – Схемы объектов САР. а) электрическая цепь R-C сопротивлений; б) газотурбинный двигатель. |
Таким образом, выражения (1.1) и (1.2) показывают, что изменение выходного напряжения электрической цепи R-C и газотурбинного двигателя описываются одинаковыми дифференциальными уравнениями первого порядка, отличающимися только входящими в них коэффициентами.
На практике уравнения, описывающие поведение объектов управления и регуляторов, бывают гораздо более сложными. Определение параметров движения реальных объектов даже с использованием современных ЭВМ представляет значительные трудности. Поэтому проектирование, расчеты параметров и обеспечение заданного качества работы САР основывается на определенных методах, которые заключаются в следующем.
1. Сложные объекты управления и регуляторы разбивают на отдельные типовые элементы, которые описываются достаточно простыми математическими уравнениями. Решения этих уравнений, а значит и свойства этих элементов известны заранее. Результатом этого разбиения являются структурные схемы объектов управления и регуляторов, которые показывают как отдельные элементы, образующие сложную систему, связаны между собой.
2. Для сравнительного анализа поведения отдельных элементов и устройств в целом используют стандартные возмущения в виде ступенчатой функции или гармонической функции (рисунок 1.4).
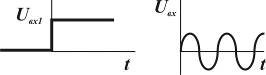
Рисунок 1.4 – Типовые возмущения используемые в теории автоматического регулирования и их аналитические выражения
Реакция элемента или системы в целом на ступенчатое возмущение является функцией времени и называется переходным процессом.
Реакция элемента или системы в целом на гармонические возмущения является функцией частоты и амплитуды возмущения и называется частотной характеристикой элемента или системы.
Структурные системы САР в наглядной форме отображают состав систем и связи между ними. С их помощью удобно проводить расчеты САР методами анализа и синтеза.
В связи с появлением современного программного обеспечения в автоматике используются унифицированные методы изображения элементов структурных схем, значительно упрощающие методы расчета систем на ЭВМ. Основные обозначения элементов структурные схем, используемые в приложении Simulink к MatLab (математическая лаборатория) представлены в таблице 1.1.
Таблица 1.1 – Основные обозначения элементов структурных схем
| № | Наименование элемента и его представление | Связь выходного и входного сигналов |
Линия связи (передачи информации)

| Хвых=Х1 | |
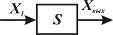
Элемент сравнения

| Хвых=Х1-Х2 | |
Сумматор (элемент сложения сигналов)

| Хвых=Х1+Х2 | |
Элемент перемножения

| Хвых=Х1×Х2 | |
Элемент – усилитель (Gain)

| Хвых=KХ2 | |
Элемент дифференцирования (Derivate)
| 
| |
Элемент интегрирования (Integrator)
| 
| |
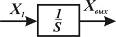
Элемент функциональный (Transfer function)
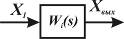
| 
|
В поле прямоугольника, обозначающего элемент системы, вписывают математическое описание свойств этого элемента, позволяющее определить взаимосвязь в изменении выходного сигнала Хвых в зависимости от изменения входного.
Обычно такую взаимосвязь записывают в виде дифференциальных уравнений в полных или частных производных. В теории автоматического регулирования пользуются не уравнениями объектов и устройств систем регулирования, а их передаточными функциями. Под передаточной функцией понимается отношение изображений по Лапласу выходной величины объекта и устройства к изображению функции входной величины, полученных при нулевых начальных условиях. Передаточная функция обозначается  , где s – оператор дифференцирования
, где s – оператор дифференцирования  .
.
Так, например, передаточная функция газотурбинного двигателя имеет общее выражение:
 .
.
Структурная схема для исследования характеристик двигателя описываемого данной передаточной функцией имеет вид представленный на рисунке 1.5.
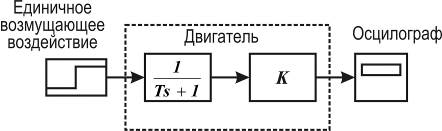
Рисунок 1.5 – Структурная схема изучения динамических
характеристик двигателя
Дата добавления: 2016-02-02; просмотров: 1412;