ПРИНЦИПЫ ДЕЙСТВИЯ И СТРУКТУРНЫЕ СХЕМЫ СИСТЕМ РЕГУЛИРОВАНИЯ ЧАСТОТЫ ВРАЩЕНИЯ ГТД С РЕГУЛЯТОРАМИ РАЗЛИЧНЫХ СХЕМ
САР с регулятором прямого действия (рисунок 3.1)
Регулятором прямого действия называется регулятор, у которого чувствительный элемент, определяющий фактическое значение частоты вращения приводит в действие исполнительный элемент регулятора.
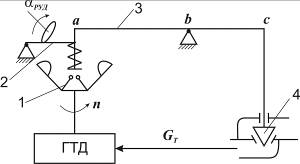
Рисунок 3.1 – Схема регулятора прямого действия
Регулятор состоит из чувствительного элемента 1 (датчик частоты вращения), включающего в себя центробежные грузики, размещенные на вращающейся опоре, задающего устройства 2 с поворотным кулачком-эксцентриком и рычагом, изменяющим затяжку пружины, элемента сравнения, представляющего собой рычаг 3, исполнительного устройства 4, изменяющего расход топлива.
На установившемся расчетном режиме работы двигателя центробежная сила грузиков чувствительного элемента 1 уравновешивается силой затяжки пружины, при этом рычаг 3 занимает такое положение, при котором на вход в двигатель поступает расход топлива необходимый для работы на заданном режиме.
При изменении условий работы или внешней нагрузки (N), действующей на двигатель (например, в сторону увеличения, как это представлено на рисунке 3.2) регулятор работает следующем образом. При уменьшении частоты вращения ротора точка «а» смещается по схеме вниз, соответственно точка «с» - вверх.
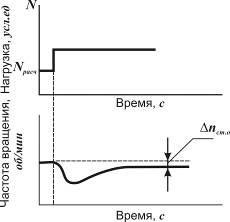
Рисунок 3.2 – Изменение частоты вращения двигателя
при увеличении нагрузки
Расход топлива начинает увеличиваться. При этом и частота вращения ротора начнет увеличиваться. Однако этот процесс происходит с запаздыванием, обусловленным значительной инерционностью ротора ГТД. С течением времени изменение расхода топлива прекращается, переходный процесс изменения частоты вращения также заканчивается. В соответствии с нагрузочной характеристикой новой нагрузке, действующей на двигатель, соответствует новое значение расхода топлива, то есть новое положение точки С рычага а-b-c.
Это новое положение определяется новым равновесием силы пружины задатчика и фактической центробежной силой грузиков чувствительного элемента. Это равновесие наступает при новом (меньшем) значении частоты вращения, то есть при изменении нагрузки на двигатель частота вращения ротора отклоняется от исходной. Это отклонение зависит от нагрузочной характеристики двигателя, от конструктивных параметров и характеристик регулятора (жесткости, пружины, соотношения плеч рычага а-b-c, геометрии топливного крана и др.). Это отклонение имеет место при любом сочетании конструктивно-настроенных параметров регулятора прямого действия и носит название статической ошибки регулятора  .
.
Кроме наличия статической ошибки недостатком регулятора прямого действия является необходимость увеличения массы грузиков и, следовательно, размеров и массы всего регулятора для приведения в действие исполнительного механизма регулятора.
Достоинством регулятора прямого действия является его простота.
Для составления структурной схемы САР с регулятором частоты прямого действия, структурную схему ГТД, представленную на рисунке 3.3 необходимо дополнить моделью регулятора. Динамические свойства регулятора прямого действия, принимая инерционные свойства тахометрического элемента, рычага a-d-c и дозирующей топливной иглы пренебрежимо малым по сравнению с инерционностью ротора ГТД, логично описать уравнением:
 , (3.1)
, (3.1)
где  - коэффициент усиления регулятора при изменении частоты вращения.
- коэффициент усиления регулятора при изменении частоты вращения.
Из уравнения (3.1) можно получить передаточную функцию регулятора:

 .
.
При этом, структурная схема САР с регулятором прямого действия имеет вид, представленный на рисунке 3.3.

Рисунок 3.3 – Структурная схема САР с регулятором прямого действия
Дата добавления: 2016-02-02; просмотров: 1960;