САР с регулятором с гибкой связью
Устранить наличие статической ошибки при сохранении удовлетворительной динамики процесса управления позволят использование регуляторов с гибкой обратной связью (рисунок 3.10).
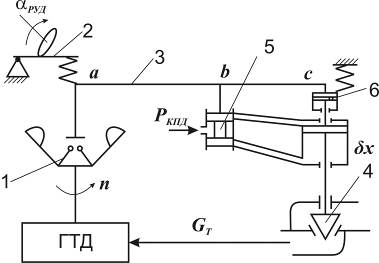
Рисунок 3.10 - Схема регулятора непрямого действия
с гибкой обратной связью
В отличии рассматриваемого ранее регулятора с гибкой обратной связью, действующей независимо от времени, сигнал гибкой обратной зависит от скорости изменения управляющего воздействия регулятора, то есть действует по времени. С этой целью в тягу обратной связи устанавливается устройство 6, так называемый «изодром». Он представляет собой гидроцилиндр, корпус которого связан с точкой «с» рычага a-b-c и пружины двухстороннего действия. Внутренний поршень изодрома соединен с поршнем силового гидроцилиндра. Поршень изодрома имеет дросселирующее отверстие сообщающее его полости между собой. При отклонении частоты вращения ротора двигателя, как и в рассматриваемой ранее схеме, точка «b» рычага a-b-c смещается, вызывая перемещение поршня силового цилиндра и изменяя расход топлива на входе в двигатель. Перемещение поршня силового цилиндра, в свою очередь вызывает смещение внутреннего поршня изодрома. Если изменение расхода топлива происходит достаточно быстро, жидкость из одной полости изодрома не успевает перетекать в другую. Корпус изодрома, а с ним и точка «с» перемещаются, сжимая или растягивая пружину. Обратная связь в данный момент времени работает как жесткая и обеспечивает хорошую динамику процесса регулирования. По окончании переходного процесса скорость изменения расхода топлива снижается. Под действием силы пружины жидкость из одной полости изодрома через отверстия перетекает в другую полость. Процесс регулирования заканчивается, когда при неизменном расходе топлива, точка «с» становиться в единственном первоначальном положении, а значит и точка «a» остается так же в первоначальном положении. При этом фактическое значение частоты вращения грузиков сохраняется на первоначальном уровне без статической ошибки. Поэтому такой регулятор носит название астатического, то есть не имеющего статической ошибки.
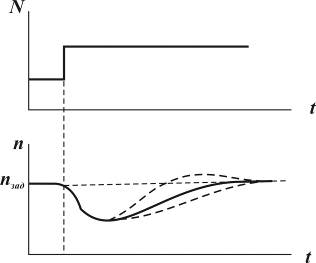
Процессы регулирования при увеличении нагрузки на двигатель могут протекать так, как это представлено на рисунке 3.11.
|
| Рисунок 3.11 - Переходные процессы в САР с регулятором с гибкой обратной связью |
Конкретный вид переходного процесса зависит от параметров регулятора (размеров, жесткости пружины изодрома, сопротивления жиклера и др.) При соответствующем соотношении этих параметров может быть обеспечена наилучшая форма переходного процесса.
Дата добавления: 2016-02-02; просмотров: 1399;