САР с регулятором с жесткой обратной связью
С целью улучшения динамики работы САР используются внутренние обратные связи в регуляторах. Внутренняя обратная связь представляет собой дополнительный канал передачи информации с выхода регулятора на его вход. Этот канал предназначен для того чтобы информация о выполненном управляющем воздействии передавалась на вход в регулятор не дожидаясь пока это воздействие вызовет изменение режима работы двигателя.
Обратная связь действует независимо от времени, и называется жесткой обратной связью.
В рассматриваемой схеме регулятора жесткая связь образуется тягой, соединяющей точку «с» рычага a-b-c и дозирующую топливную иглу (рисунок 3.7).
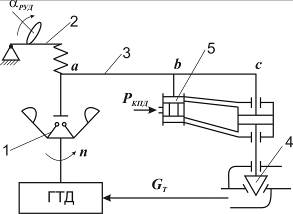
Рисунок 3.7 - Схема регулятора непрямого действия с жесткой
обратной связью.
Регулятор работает следующим образом:
При изменении внешней нагрузки (например в сторону увеличения) точка «а» рычага a-b-c смещается вниз. Поскольку полости силового гидроцилиндра заперты управляющим золотником, точка «b» начинает перемещаться вниз. В нижнюю часть гидроцилиндра начинает поступать жидкость под давлением, а верхняя полость сообщается со сливом. Перемещение поршня вверх вызывает увеличение расхода топлива на входе в двигатель. Этот процесс аналогичен процессу управления в САР с регулятором непрямого действия, описанным выше. Но в данном случае увеличение расхода топлива вызовет соответствующее перемещение точки «с» рычага a-b-c благодаря тяге обратной связи. Одновременно с увеличением расхода топлива точка «b» начнет перемещаться вверх, перекрывая каналы подвода жидкости в полости силового гидроцилиндра. Не дожидаясь увеличения частоты вращения двигателя, которое происходит с запаздыванием, расход топлива уменьшается.
Благодаря этому колебания частоты вращения двигателя могут быть устранены. Однако, по окончанию переходного процесса, частота вращения ротора двигателя устанавливается на новом значении, отличном от первоначального, заданного управляющим воздействием  . Это отклонение называется статической ошибкой регулятора и присуще любой САР, оснащенной регулятором с жесткой обратной связью.
. Это отклонение называется статической ошибкой регулятора и присуще любой САР, оснащенной регулятором с жесткой обратной связью.
Как образуется статическая ошибка в рассматриваемом регуляторе? По окончанию переходного процесса расход топлива отличается от первоначального. Но поскольку полости силового цилиндра перекрыты, точка «b» рычага a-b-c находиться в единственном возможном первоначальном положении. А это положение может сохраняться только тогда, когда точка «а» находиться в новом положении, т.е. при новом равновесии силы грузиков 1 и пружины задатчика 2.
Переходные процессы изменения частоты вращения «n» при увеличении нагрузки (N) на двигатель протекают так, как это представлено на рис. 3.8.
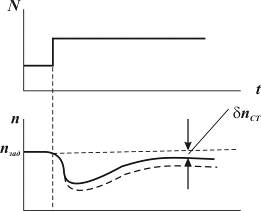
Рисунок 3.8 - Переходные процессы в САР с регулятором непрямого действия с жесткой обратной связью при увеличении нагрузки на двигатель.
 - статическая ошибка регулирования.
- статическая ошибка регулирования.
При уменьшении нагрузки переходные процессы могут протекать так, как это предоставлено на рисунке 3.9. Как это следует из рисунка, статическая ошибка при этом показывает не снижение, а превышение фактической частоты вращения двигателя над заданным вращением.
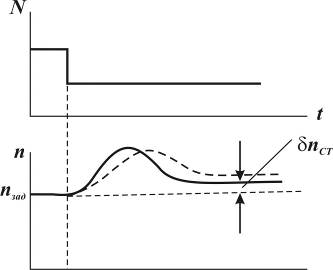
Рисунок 3.9 - Переходные процессы в САР с регулятором c жесткой обратной связью при уменьшении нагрузки на двигатель.
Значение статической ошибки зависит от конструктивных параметров регулятора (жесткости пружины задатчика, соотношения плеч рычага a-b-c, профилировка топливного крана) и выбором соответствующих значений этих параметров, она может быть достаточно малой.
Дата добавления: 2016-02-02; просмотров: 1862;