ЭЛЕКТРИЧЕСКИЙ ПРИВОД
6.6.1. РАННИЙ ПЕРИОД РАЗВИТИЯ ЭЛЕКТРОПРИВОДА
История развития электрического привода, являющегося целенаправленным органичным сочетанием электрических машин, аппаратов, преобразователей и устройств управления, неразрывно обусловлена образующими электропривод компонентами. Вместе с тем электропривод, как система, осуществляющая управляемое электромеханическое преобразование энергии, имеет свою собственную историю.
Начало развития электропривода было положено созданием в первой половине XIX в. работоспособных образцов электрического двигателя. Первое практическое использование электродвигателя постоянного тока, оснащенного другими характерными элементами электропривода: механической передачей, органами управления и т.п. и обеспечивавшего движение катера вверх по р. Неве, относят к 1834–1838 гг. и связывают с именем акад. Б.С. Якоби. Эта работа получила широкую мировую известность, однако несовершенство технических средств и, главным образом, источника питания – гальванической батареи, не позволило блестящему изобретению Б.С. Якоби и работам его последователей получить широкое практическое применение.
Лишь в 70‑е годы XIX в. были разработаны практически применимые двигатели постоянного тока, широко демонстрировавшиеся на выставках в Вене (1873 г.). Париже (1881 г.), Мюнхене (1882 г.). Стали появляться сведения об их использовании в составе электропривода для практических целей, чему в значительной мере способствовало создание в 80‑е годы ряда передач постоянного тока напряжением до 6000 В [6.53].
К первым применениям электропривода можно отнести некоторые артиллерийские механизмы на русских судах «Россия» и «Веста» (1887 г.), электрическую железную дорогу и ткацкий станок, демонстрировавшийся на промышленной выставке в Берлине (1879 г.), первый электрический трамвай Ф.А. Пироцкого (1880 г.), электрические швейные машины (1882 г.) и вентиляторы (1886 г.) В.Н. Чиколева, судовые электрические подъемники и рулевые механизмы (1890–1892 гг.), металлургические машины на ряде американских заводов, оборудованные электроприводами постоянного тока с полуавтоматическим управлением посредством контакторов, командоконтроллеров и т.п. (1890–1892 гг.) [6.54].
Условия для развития массового электропривода создались в конце XIX в. благодаря открытию в 1886 г. Г. Феррарисом и Н. Тесла явления вращающегося магнитного поля, положившему начало созданию многофазных электродвигателей переменного тока, и, главным образом, благодаря комплексу выдающихся работ М.О. Доливо‑Добровольского, который в 1888 г. предложил и реализовал трехфазную систему передачи электрической энергии переменного тока и разработал в 1889 г. трехфазный асинхронный двигатель с распределенной обмоткой статора и с короткозамкнутым ротором в виде беличьего колеса [6.55].
С развитием материальной базы электропривода создавалась его теория.
Первой теоретической работой по электроприводу в России можно считать статью Д. А. Лачинова «Электромеханическая работа», опубликованную в журнале «Электричество» в 1880 г. В 1898 г. в учебных планах Петербургского электротехнического института появилась самостоятельная дисциплина «Электрическая передача и распределение электрической энергии». На основе первых разработок в области электропривода П.Д. Войнаровский в 1900 г. и В.В. Дмитриев в 1903 г. выпустили первые учебные пособия по курсу «Электрическая передача и распределение механической энергии». Так начиналась в России подготовка специалистов в области электропривода.
6.6.2. ПЕРЕХОД ОТ ГРУППОВОГО ПРОМЫШЛЕННОГО ЭЛЕКТРОПРИВОДА К ИНДИВИДУАЛЬНОМУ
Конец XIX – начало XX в. характеризуется строительством электрических станций и развитием электрических сетей. Первая электростанция была построена исключительно для целей освещения. Централизованная выработка электроэнергии с ее последующим распределением послужила основной для создания промышленного электропривода.
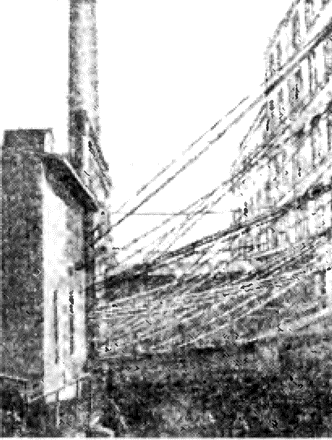
Рис. 6.33. Групповой привод на текстильной фабрике
На замену использовавшемуся ранее групповому приводу с паровым или гидравлическим первичным двигателем и механическим распределением энергии с помощью ремней и канатов (рис. 6.33) [6.54] пришел групповой электропривод. Не изменяя общей компоновки, он позволял не иметь на каждой фабрике свою тепловую станцию с паровыми котлами или гидравлическую с водяными колесами и основывался на использовании централизованного электроснабжения – электрической сети (рис. 6.34).
Интересно, что даже нововведение – промежуточное звено в виде электродвигателя между первичным двигателем и рабочей машиной – вызывало вначале у многих недоумение вследствие удорожания оборудования, его усложнения и возникновения потерь энергии при передаче ее по проводам на значительные расстояния.
Еще большее недоумение и возражения в начале XX в. вызывала идея перехода к одиночному электроприводу (рис. 6.35), т.е. к замене механического распределения энергии электрическим, приближению электродвигателя к рабочей машине. Несмотря на уже имевшиеся положительные примеры таких решений, можно утверждать, что всю первую четверть XX в. шла борьба между сторонниками группового и индивидуального электропривода.
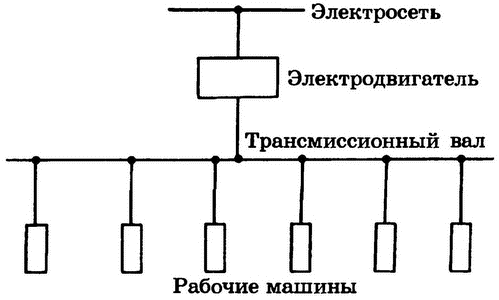
Рис. 6.34. Групповой электропривод
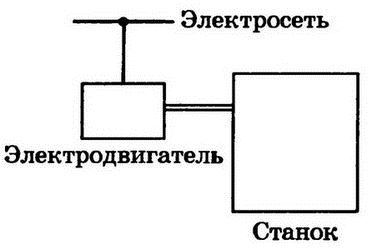
Рис. 6.35. Одиночный электропривод
Доводы первых выглядели весьма серьезно. Так, по данным крупных американских специалистов, относящимся к 1924 г. [6.54], стоимость установленной мощности двигателя с необходимым оборудованием составляла для группового электропривода 29 долл., для индивидуального – 150 долл. Для индивидуального привода установленная мощность оказывалась в 3–5 раз больше, чем для группового, за счет разновременности нагрузок в последнем. Требовалось время для понимания неправомерности подобных сравнений, не учитывающих всего комплекса условий, определяющих результат.
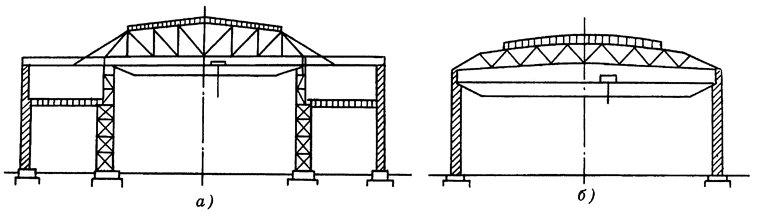
Рис. 6.36. Промышленные здания для группового (а) и одиночного (б) электроприводов
В эти условия входили, в частности, стоимость промышленных зданий, которые при групповом приводе оказались существенно более громоздкими (рис. 6.36), стоимость механических передач и потерь в них, удобство расположения рабочих машин, легкость их перемещения при изменении технологии производства, удобство компоновки производственной среды в целом, включая размещение подъемно‑транспортных и других вспомогательных средств, существенное повышение общей культуры и безопасности производства и как следствие повышение производительности труда на 15–20%.
Естественным итогом продолжавшегося более 25 лет непростого соревнования группового и индивидуального электроприводов была полная победа последнего на всех вновь строящихся предприятиях.
В России большую роль в развитии массового индивидуального электропривода сыграл план ГОЭЛРО, в соответствии с которым осуществлялись реконструкция старых и строительство новых электростанций, развивалась отечественная электротехническая промышленность.
Одновременно электрический привод вытеснял все виды механического привода. Так, мощность электродвигателей по отношению к общей мощности установленных двигателей в 1890 г. составляла 5%, в 1927 г. – 75%, к 1950 г. – около 100% [6.56]. Вместе с тем еще в публикациях конца 20‑х годов, например в книге [6.57], изданной в США в 1928 г., значительное место уделено сопоставлениям группового и индивидуального электроприводов, доказательствам преимуществ последнего.
Одновременно с развитием индивидуального электропривода создавалась его теория, была организована подготовка специалистов в этой области. В 1922 г. в Ленинградском электротехническим институте (ЛЭТИ) С.А. Ринкевичем была открыта кафедра электрического привода, а в 1924–1926 гг. выпущены первые инженеры этого профиля. В 1925 г. вышел в свет первый отечественный учебник по электроприводу С.А. Ринкевича «Электрическое распределение механической энергии».
В 1925 г. в системе Всесоюзного электротехнического объединения создается первая проектная организация «Электропром» (позднее Государственный проектный институт – ГПИ – «Тяжпромэлектропроект»), в 1929 г. научные исследования в области электропривода организуются в ВЭИ. В 1929–1932 гг. создаются кафедры электропривода в Ленинградском политехническом (ЛПИ), Московском энергетическом (МЭИ), Харьковском электротехническом (ХЭТИ) институтах. Начинается интенсивное развитие отечественных научных школ в области электропривода. В 1930 г. в Харькове состоялась первая электротехническая конференция по электроприводу.
6.6.3. РЕГУЛИРУЕМЫЙ ЭЛЕКТРОПРИВОД – ПОИСК РЕШЕНИЙ
В период интенсивного перехода к индивидуальному электроприводу, который в России практически завершился к 1934 г., во всех новых производствах появилось большое количество различных типов электроприводов.
Если в нерегулируемом электроприводе малой и средней мощности прочно заняли свое место и не уступили его до настоящего времени асинхронные двигатели с короткозамкнутым ротором, а в мощных электроприводах – синхронные двигатели, то регулируемые электроприводы были весьма разнообразны. Это было связано с ограниченными техническими возможностями средств управления, вследствие чего приходилось искать способы управления в свойствах собственно электродвигателей. Так, широко использовались двигатели постоянного тока с различными схемами возбуждения (независимой, параллельной, последовательной, смешанной) при реостатном регулировании или при ослаблении магнитного поля, асинхронные двигатели с фазным ротором, коллекторные двигатели переменного тока, двигатели Бушеро и т.п.
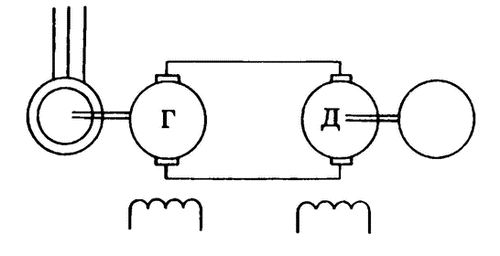
Рис. 6.37. Система Вард‑Леонарда (система Г – Д)
Наибольшее применение в регулируемых электроприводах средней и большой мощности в этот период и в дальнейшем нашла предложенная еще в конце XIX в. система Вард – Леонарда (генератор – двигатель), состоящая из нескольких электрических машин (рис. 6.37), но обладающая отличными регулировочными возможностями как в статике, так и в динамике. На основе этой системы удалось создать электропривод реверсивных прокатных станов. Первой такой установкой в СССР был электропривод блюминга мощностью 7000 л.с., выпущенный заводом «Электросила» в 1931 г. (рис. 6.38). Для питания двигателя был установлен трехмашинный агрегат, состоящий из асинхронного двигателя мощностью 3680 кВт и двух генераторов постоянного тока мощностью по 3000 кВт. Система управления, разработанная ХЭМЗ, решала задачи автоматического управления магнитным полем генераторов и двигателей, моментом асинхронных двигателей и т.п.
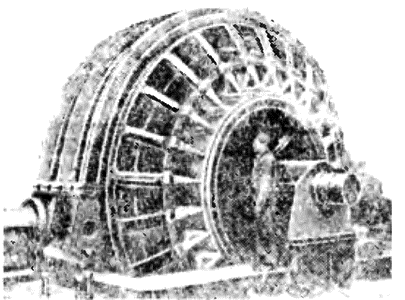
Рис. 6.38. Главный двигатель прокатного стана
6.6.4. ИНДИВИДУАЛЬНЫЙ ЭЛЕКТРОПРИВОД В ТЕХНОЛОГИЧЕСКИХ УСТАНОВКАХ
Индивидуальный электропривод сыграл большую роль в развитии и совершенствовании многих технологических машин и агрегатов. Это осуществлялось главным образом за счет приближения двигателя к рабочему органу и исключения благодаря этому значительной части громоздких механических передач, а также за счет перехода от механического к электрическому управлению скоростью. Ниже показано несколько примеров эволюции привода и кинематики механизмов ряда технологических агрегатов [6.54]: текстильной центрифуги (рис. 6.39), цементной печи (рис. 6.40), рольганга (рис. 6.41), фрезерного станка (рис. 6.42) [6.58]. Эти примеры свидетельствуют о серьезных упрощениях в конструкции агрегатов при одновременном повышении функциональных возможностей, производительности и качества технологического процесса, снижении потерь электроэнергии.

Рис. 6.39. Видоизменение одиночного электропривода текстильной центрифуги
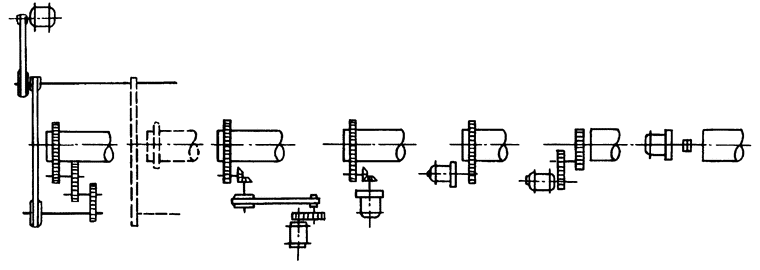
Рис. 6.40. Видоизменение передач между двигателем и цементной печью
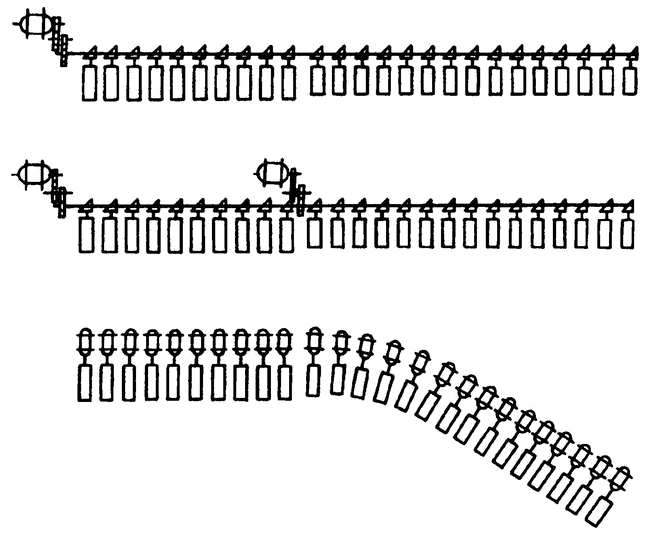
Рис. 6.41. Эволюция электропривода рольганга
Так, опыты, проведенные на трех аналогичных токарных станках, показали, что при непосредственном приводе шпинделя от двигателя удельная производительность составила 13,4, при приводе через зубчатые колеса 8,3 и через ступенчатые шкивы – 7,4 кг/кВт∙ч [6.54]. При переходе в одном из типов прядильных машин к многодвигательному индивидуальному электроприводу производительность выросла на 40–100% при уменьшении потребления энергии на 20–40% и снижении численности персонала на 60% [6.54, 6.58].
Еще больший эффект дает соединение электродвигателя с рабочим органом рабочей машины в одно единое целое: мотор – колесо транспортного средства, электрошпиндель, электроверетено, электроинструмент, ролик рольганга в виде наружного ротора двигателя со статором, размещенным внутри, и т.п. Это направление интеграции отдельных элементов в электромеханические модули, возникшее на ранней стадии освоения индивидуального электропривода, получило особенно убедительное развитие в последние годы.
Влияние электрического регулирования скорости на кинематику агрегата иллюстрируется на рис. 6.43 [6.58] применительно к сверлильному станку с механическим (а), электромеханическим – двухскоростной двигатель (б) и электрическим (в) регулированием скорости.
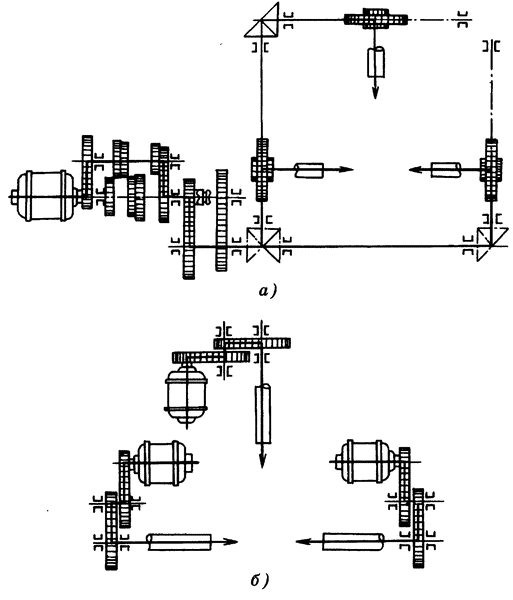
Рис. 6.42. Фрезерный станок с одиодвигательным (а) и трехдвигательным (б) приводом
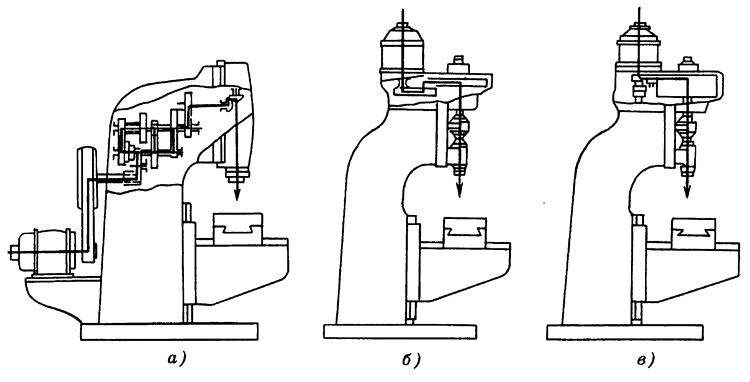
Рис. 6.43. Сверлильный станок с разными способами регулирования скорости
К началу 40‑х годов электромеханическая часть индивидуального, в том числе многодвигательного электропривода, приобрела современные черты. Его характерной особенностью оставалось релейно‑контакторное управление, хотя уже стали появляться системы непрерывного управления. К ним в первую очередь следует отнести рассмотренную ранее систему Г – Д, некоторые схемы электрического вала на асинхронных двигателях с фазным ротором, использованные на шлюзовых затворах, в ряде машин и станков.
6.6.5. АВТОМАТИЧЕСКОЕ УПРАВЛЕНИЕ В ЭЛЕКТРОПРИВОДЕ
Идеи автоматического управления, зародившиеся задолго до создания работоспособного электропривода (идеи Уатта – Ползунова и др.), в 30‑е годы начали интенсивно развиваться применительно к электроприводу. Первые практические разработки в России относятся к автоматическому управлению подачей в ряде технологических агрегатов: врубовых машинах, металлорежущих станках, нажимных устройствах прокатных станов, салазковых пилах и т.п.[6.58].
В 1934 г. B.C. Вихманом была разработана отечественная версия системы копировального станка, основанная на фотоэлектрическом копировании по чертежу. В 1936 г. Т.Н. Соколов предложил новую систему электрокопирования по шаблону с электронно‑ионным управлением, которая была реализована на станкостроительном заводе им. Я.М. Свердлова в 1940–1941 гг. Электроприводы подач копировальных станков явились первыми советскими следящими электроприводами.
В эти же годы появились и стали быстро развиваться другие принципы построения систем автоматического управления электропривода, основанные на применении замкнутых структур с использованием усилителей разных типов: машинных, электронно‑ионных, несколько позже магнитных.
В 40‑е годы особенно большое распространение получили различные электромашинные усилители (ЭМУ), основанные на предложенном К.И. Шенфером еще в 1929 г. метадине – машине постоянного тока с двойным комплектом щеток и особой конструкцией магнитной цепи. Первая отечественная система управления электропривода с ЭМУ, выполненным как генератор постоянного тока с несколькими обмотками возбуждения, опередившая аналогичные зарубежные устройства, была разработана в 1937 г. в ВЭИ.
В 1941 г. начала интенсивно развиваться военная электротехника, в частности специальные следящие электроприводы для управления орудийным огнем, радиолокации и т.п. Большую роль в создании новых, оригинальных специальных электроприводов сыграл завод № 627, руководимый А. Г. Иосифьяном, преобразованный затем в НИИ‑627, а еще позднее во ВНИИЭМ, имеющий многочисленные филиалы по всей стране. ВНИИЭМ в последующие периоды играл определяющую роль в создании авиационной, судовой, ракетной и космической техники и, в частности, ряда уникальных разработок систем ориентации, электроприводов с бесконтактными электрическими машинами и др.
В середине 40‑х годов были разработаны первые отечественные автоматическиеv линии станков: для обработки головки блока цилиндров тракторного двигателя (ЭНИМС, завод «Станкоконструкция»), для обработки блока цилиндров двигателя грузового автомобиля (станкостроительный завод им. С. Орджоникидзе) и др. Появились первые заводы‑автоматы с автоматизированными основными и вспомогательными производственными процессами.
6.6.6. ЭЛЕКТРОПРИВОДЫ СО СТАТИЧЕСКИМИ ПРЕОБРАЗОВАТЕЛЯМИ. ЗАВЕРШЕНИЕ РАЗВИТИЯ «ДОПОЛУПРОВОДНИКОВОГО» ЭЛЕКТРОПРИВОДА
В 1935 г. А. Г. Иосифьяном (ВЭИ) разработана первая версия электропривода с преобразователем на тиратронах, в 1939 г. в ВЭИ был создан регулируемый в большом диапазоне электропривод постоянного тока с питанием двигателя от тиратронного преобразователя или ртутного выпрямителя – прообраз широко распространенных сейчас регулируемых электроприводов по системе статический преобразователь – двигатель. Одним из первых его практических применений была шахтная подъемная машина, разработанная ВЭИ, ЛПИ и ХЭМЗ и пущенная в эксплуатацию в 1940 г.
С 1949 г. электроприводы с ртутными выпрямителями широко внедрялись в качестве главных приводов прокатных станов. К 1948–1950 гг. относится появление отечественных вентильных каскадов на прокатных станах с введением в цепь ротора главного асинхронного двигателя управляемого ртутного выпрямителя.
В 40–50‑е годы формируются научно‑исследовательские и проектно‑конструкторские организации, внесшие весомый вклад в развитие отечественного электропривода. Это ВЭИ (регулируемые электроприводы широкого применения), ГПИ «Тяжпромэлектропроект» (электрооборудование металлургических производств), Центральный научно‑исследовательский институт технологии машиностроения – ЦНИИТмаш (электропривод станов холодной прокатки), трест «Электропривод», позднее ВНИИэлектропривод (электропривод текстильных агрегатов, бумагоделательных и полиграфических машин, скоростных лифтов, экскаваторов), ЭНИМС (электроприводы металлорежущих станков), ВНИИЭМ (прецизионные электроприводы) и другие организации.
Практическая реализация электроприводов осуществлялась заводами «Электросила», ХЭМЗ, «Динамо», им. Я.М. Свердлова, им. С. Орджоникидзе и многими другими.
К середине 50‑х годов сформировалась теория и практика «дополупроводникового» электропривода. Были созданы и получили широкое признание учебники по электроприводу: С.А. Ринкевича «Теория электропривода» (1938 г), А.Т. Голована «Электропривод» (1948 г.), Д.П. Морозова «Основы электропривода» (1950 г.), В.К. Попова «Основы электропривода» (1951 г.) и многие другие. Особенно следует отметить учебник М.Г. Чиликина «Общий курс электропривода», вышедший в 1953 г., выдержавший шесть изданий и внесший благодаря высокому уровню и доступности изложения весомый вклад в подготовку специалистов в СССР.
Стали общепринятыми основные технические решения – асинхронный с короткозамкнутым двигателем и синхронный электроприводы, если скорость не регулируется; электроприводы постоянного тока (система Г – Д, П – Д) или в отдельных случаях (краны и пр.) асинхронный электропривод с двигателем с фазным ротором, если нужно регулировать скорость или момент. В цепях возбуждения машин постоянного тока применялись ЭМУ, тиратронные выпрямители или магнитные усилители. Использовалось много разнообразных решений: магнитные усилители в цепи статора асинхронного двигателя, импульсное регулирование, машины двойного питания, электрический вал и т.п.
В США созданы основы современной теории электромеханического преобразования энергии на основе обобщенной машины, получившие впоследствии широкое использование в практике разработки управляемого электропривода.
Все усилия направлены на решение задачи создания эффективных регулируемых электроприводов, вместе с тем основная масса (более 95%) электроприводов остается нерегулируемой.
6.6.7. ПОЛУПРОВОДНИКОВЫЕ ПРИБОРЫ В ЭЛЕКТРОПРИВОДЕ. СИСТЕМЫ ТИРИСТОРНЫЙ ПРЕОБРАЗОВАТЕЛЬ – ДВИГАТЕЛЬ (ТП – Д) И ИСТОЧНИК ТОКА – ДВИГАТЕЛЬ (ИТ – Д)
В послевоенные годы в ведущих лабораториях мира произошел прорыв в области силовой электроники, кардинально изменивший многие сферы техники и, в частности, электропривод. В 1948 г. Дж. Бардин и В. Браттейн (Белловская лаборатория, США) создали первые транзисторы. В конце 50‑х – начале 60‑х годов на первых, еще очень несовершенных силовых транзисторах (ток 5 А, напряжение 60 В), работающих в ключевом режиме, было построено множество оригинальных схем для питания маломощных двигателей и для цепей возбуждения мощных двигателей. В качестве примера можно привести известный преобразователь Ройера (рис. 6.44), преобразующий постоянное напряжение в прямоугольное переменное с управляемой частотой, и множество модификаций этой схемы. В технику электропривода начал входить управляемый ключ и построенные на его основе устройства.
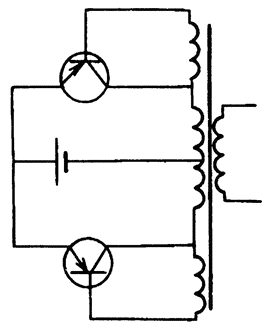
Рис. 6.44. Преобразователь Ройера
Радикальное воздействие на технику электропривода оказал тиристор – мощный полууправляемый ключ, созданный в 1955 г. усилиями Дж. Молла, М. Танненбаума, Дж. Голдея и Н. Голоньяка (США). Появление тиристоров на тысячи вольт и большие токи при малых падениях напряжения в проводящем состоянии позволило полностью отказаться от громоздких, ненадежных и неэкономичных ртутных выпрямителей и тиратронов и полностью перейти на управляемые тиристорные выпрямители (рис. 6.45) как в цепях возбуждения, так и в силовых цепях электроприводов постоянного тока. В [6.59] приведены любопытные диаграммы развития аппаратной базы электропривода (рис. 6.46) и цепей возбуждения крупных прокатных двигателей (рис. 6.47); годы указаны приближенно.
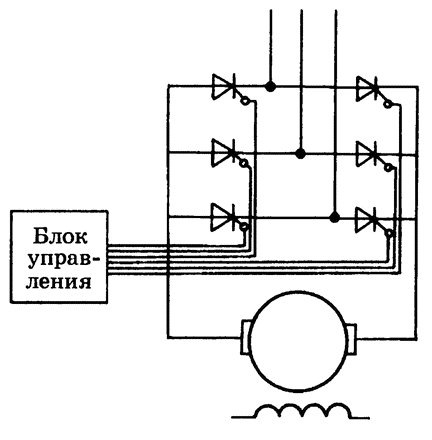
Рис. 6.45. Система тиристорный преобразователь – двигатель
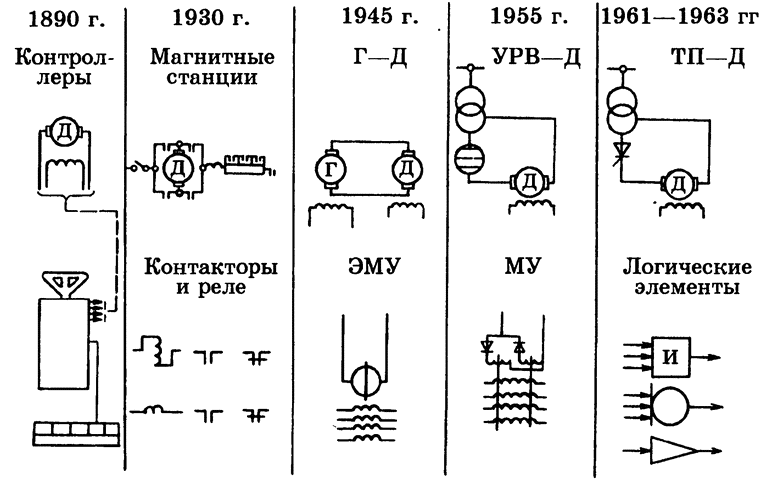
Рис. 6.46. Развитие электропривода
Система тиристорный преобразователь – двигатель постоянного тока (ТП – Д) стала с середины 60‑х годов практически единственным техническим решением регулируемого электропривода малой и средней мощности; тиристорные возбудители активно вытеснили другие устройства в цепях возбуждения мощных электроприводов.
Преимущества системы ТП – Д, обеспечившие ей широкое применение взамен системы Г – Д, состоят в высоком быстродействии, компактности (блочная компоновка), высоком КПД, минимальном обслуживании, высокой надежности. На фоне этих преимуществ недостатки системы ТП – Д (дорогой двигатель постоянного тока, сложность рекуперации, ухудшение коммутации, низкий коэффициент мощности, пульсации выпрямленного напряжения и радиопомехи) на первых порах казались несущественными.
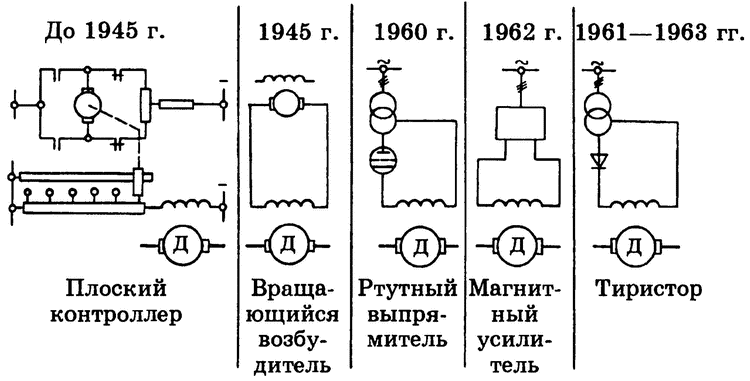
Рис. 6.47. Управление возбуждением крупных прокатных двигателей
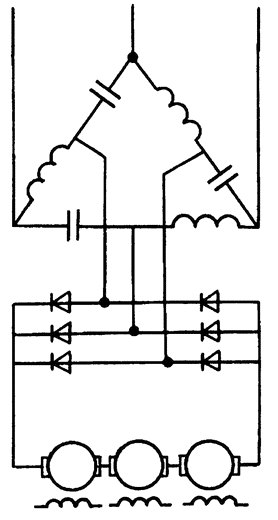
Рис. 6.48. Система источник тока – двигатель
Примерно в это же время у системы ТП – Д появился конкурент. В 70‑е годы в Институте электродинамики АН УССР и в МЭИ были проведены исследования оригинальной системы параметрический источник тока – двигатели постоянного тока (рис. 6.48), уверенно занявшей свое место в агрегатах кабельной промышленности, в ряде технологических линий, лебедках, нагрузочных устройствах и т.п.
6.6.8. РАЗВИТИЕ АСИНХРОННОГО И ДИСКРЕТНОГО ЭЛЕКТРОПРИВОДОВ
К 60–70‑м годам относится активизация научной работы в области электропривода в ведущих вузах страны. В частности, в Московском энергетическом институте (МЭИ), Уральском политехническом институте (УПИ) и Одесском политехническом институте (ОПИ) проведены серьезные работы по асинхронному электроприводу с тиристорами в цепи статора (рис. 6.49). Созданы теория и ряд базовых конфигураций такого электропривода, обосновано его применение в качестве «мягких» пускателей, экономайзеров, предприняты попытки практического использования параметрического регулирования.
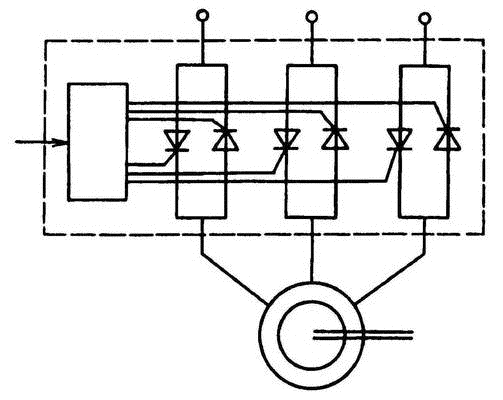
Рис. 6.49. Система тиристорный регулятор напряжения – асинхронный двигатель
Работы Ф. Блашке (ФРГ), опубликованные в начале 70‑х годов, положили начало созданию систем асинхронного электропривода с ориентацией по магнитному полю с так называемым векторным управлением (система трансвектор).
В СССР получили развитие начатые еще в начале 40‑х годов (А.А. Булгаков, М.П. Костенко) перспективные работы в области частотно‑регулируемого электропривода. В трудах А.С. Сандлера и его учеников в 70‑х годах нашли отражение вопросы построения преобразователей частоты с явно выраженным звеном постоянного тока на доступной в то время элементной базе – тиристорах, были сформулированы и детально исследованы принципы автоматического управления электропривода с преобразователями частоты.
Появились работы в области частотно‑токового управления в асинхронном приводе.
В 60–70‑е годы в МЭИ под руководством М.Г. Чиликина проведены интенсивные исследования и разработки дискретного электропривода с шаговыми двигателями (Б.А. Ивоботенко), широко внедренные в металлургической, станкостроительной и других отраслях промышленности, получившие признание технической общественности и заложившие основы дальнейшего развития новых типов регулируемого электропривода.
Одновременно работы в области дискретного электропривода были начаты в ряде других научных центров, в частности в Лидском университете (Великобритания), ставшем позднее известным своими работами, связанными с силовыми версиями дискретного электропривода (П. Лауренсон).
В этот же период развивается электропривод с вентильными двигателями, в которых коллектор заменяется группой полупроводниковых ключей, коммутирующих обмотки и управляемых в функции положения ротора.
6.6.9. СИСТЕМЫ ПОДЧИНЕННОГО РЕГУЛИРОВАНИЯ
Транзисторы и многочисленные устройства на их основе позволили перейти к практической реализации ряда эффективных идей в области систем управления электропривода.
Наиболее плодотворной оказалась идея, предложенная еще в середине 50‑х годов Кесслером (ФРГ) и состоящая в подчиненном регулировании координат электропривода с последовательной коррекцией. Сложная система строится как совокупность отдельных, но подчиненных один другому контуров (тока, скорости, положения и др.), каждый из которых оптимизируется отдельно посредством своего регулятора (рис. 6.50).
Во ВНИИэлектроприводе в 60–70‑е годы были созданы нашедшие широкое применение в промышленности комплексы средств управления электропривода – аналоговая ветвь УБСР‑АИ и цифровая ветвь УБСР‑ДИ. Эти технические средства сыграли заметную роль в практическом развитии электропривода, поскольку они унифицировали, упрощали, сокращали время наладки и пуска сложных систем регулируемого электропривода постоянного и переменного тока с преобразователем частоты с непосредственной связью (ПЧНС).
К указанному периоду относится завершение в МЭИ (В.И. Ключев) комплекса работ, связанных с глубоким исследованием механической части привода с упругими связями, ее взаимодействия с электрической частью. Были успешно решены проблемы синтеза сложных электромеханических систем, где в полной мере использовались идеи подчиненного регулирования координат.
В ЛЭТИ были развиты оригинальные идеи управления сложными взаимосвязанными электромеханическими объектами.
Большое внимание уделялось проблемам электромагнитной совместимости электропроводов с питающей сетью (ГПИ «Тяжпромэлектропроект»), в чем отражалось расширяющееся применение электропроводов с тиристорными преобразователями и современными средствами управления.
6.6.10. МИКРОПРОЦЕССОРЫ В ЭЛЕКТРОПРИВОДЕ
Создание в США на границе 60–70‑х годов четырехразрядного однокристалльного микропроцессора INTEL 4004 и программируемого логического контроллера (ПЛК) PDP 14 ознаменовало новую эру в сфере управления электропривода. Уже в 70‑е годы в мировой практике эти технические средства начали интенсивно вытеснять использовавшиеся ранее контактные и бесконтактные реле; к 80‑м годам схему управления на восьми и более реле стало экономически целесообразно заменять ПЛК.
В сравнении с устройствами монтажной логики ПЛК обладает высокой гибкостью при отладке, он не зависит от объекта управления, снижает расходы на разработку, программирование, тестирование и запуск изделия, очень компактен, имеет высокую надежность, упрощает обслуживание системы привода. ПЛК может выполнять вычисления, обеспечивать регулирование, принятие решений, наблюдение за отработкой алгоритма управления.
В сравнении с мини‑компьютером ПЛК существенно проще, он ориентирован на непосредственное общение с объектом управления. На рис. 6.51 показаны зоны рентабельного использования различных технических средств управления.
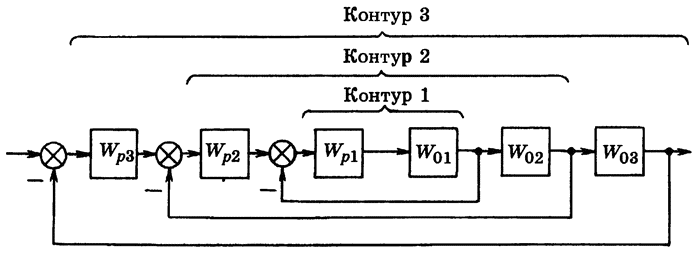
Рис. 6.50. Система подчиненного регулирования координат электропривода
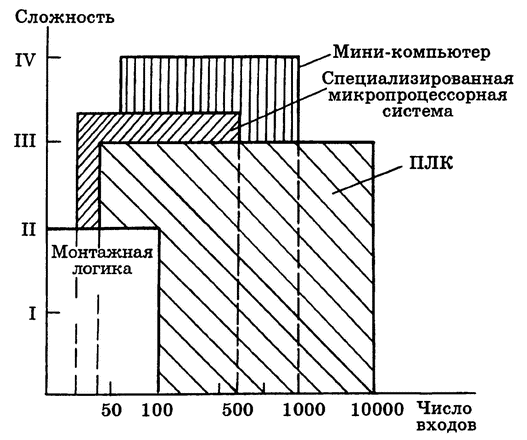
Рис. 6.51. Области рентабельного использования различных технических средств управления
По мере развития микропроцессорных средств управления и ПЛК изменялась информационная часть электропривода: резко, почти скачкообразно, наращивались функциональные возможности в управлении координатами, во взаимодействии нескольких систем между собой и с внешней средой, в детальной диагностике состояния и защите всех элементов привода от любых нежелательных воздействий.
6.6.11. СОВРЕМЕННЫЙ ЭЛЕКТРОПРИВОД
Концептуальные изменения в развитие электропривода внесла новая элементная база силового канала – полностью управляемые ключи, появившиеся на рынке в последние. 6–7 лет, и средства управления ими. Фирмы «Тошиба», «Сименс» и др. выпустили силовые транзисторы IGBT на токи до 600 А, напряжение до 1200 В с частотами 30 кГц и выше. Эти приборы, объединенные в модули с встроенными быстрыми обратными диодами и управляемые указанными выше современными средствами, послужили основой для построения преобразователей частоты со структурой неуправляемый выпрямитель – LC‑фильтр – автономный инвертор с широтно‑импульсной модуляцией (ШИМ) (рис. 6.52), ставших основным техническим решением в регулируемом электроприводе переменного тока мощностью до 600 кВт. Преобразователи более мощных приводов строятся на полностью управляемых тиристорах GTO; в бытовых и других электроприводах низкого напряжения используются приборы MOSFET.
По прогнозам до 2002 г. европейский рынок регулируемых электроприводов на 68% будет состоять из приводов переменного тока, на 15 – из приводов постоянного тока, на 10 – из гидропроводов и на 7% – из механических приводов.
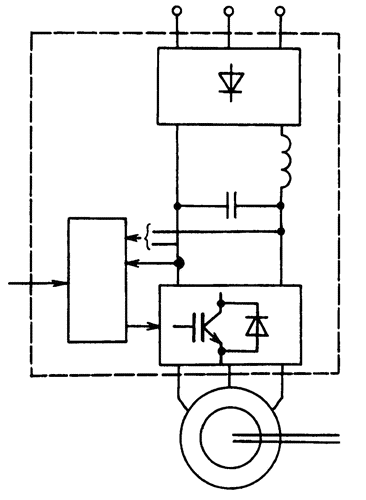
Рис. 6.52. Система преобразователь частоты ПЧ – асинхронный двигатель АД
Нетрадиционные электромеханические устройства (линейные, поворотные, планарные многокоординатные двигатели и т.п.) в сочетании с развитыми микропроцессорными средствами управления образуют электромеханические структуры, интегрированные в технологическое оборудование и создающие принципиально новый тип технологической среды.
Интенсивно осваиваются новые виды регулируемого электропривода – вентильно‑индукторный, с другими нетрадиционными электрическими машинами. В микроприводе миниатюрных роботов применяются тонкопленочные диэлектрические двигатели.
В последние годы в мире отчетливо сформировалось и интенсивно реализуется тенденция перехода от нерегулируемого электропривода к регулируемому в массовых применениях: насосы, вентиляторы, конвейеры и т.п., благодаря чему резко повышается технологический уровень оборудования, экономятся значительные энергетические ресурсы.
Электропривод сформировался сегодня как система, осуществляющая управляемое электромеханическое преобразование энергии и состоящая в общем случае из электрического (ЭП), электромеханического (ЭМП) и механического (МП) преобразователей, образующих силовой канал, измерительных преобразователей (ИП), преобразующих информацию, и управляющих устройств, входящих в информационный канал (рис. 6.53).
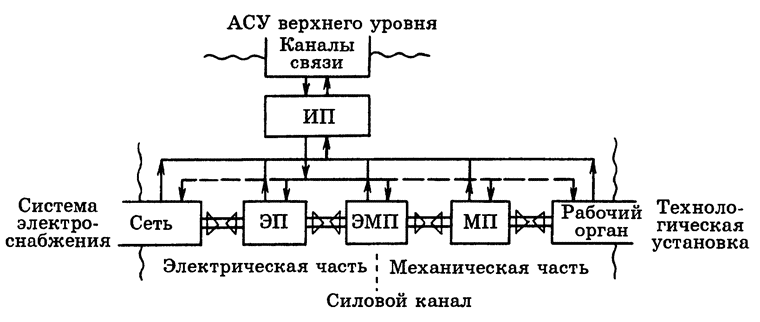
Рис. 6.53. Структура современного электропривода
Электропривод обеспечивает механической энергией подавляющее большинство агрегатов, связанных с движением во всех сферах человеческой деятельности, и может в силу этого рассматриваться как главный поставщик механической энергии, полученной из электрической в результате электромеханического преобразования. Будучи управляемой системой, электропривод взаимодействует через информационный канал с системами управления более высокого уровня и служит для них силовым интерфейсом с технологическими процессами.
Практически все процессы в современной технологии, связанные с механической энергией и движением, осуществляются электроприводом. Исключения составляют лишь автономные транспортные средства (автомобили, самолеты, некоторые виды подвижного состава и судов), использующие неэлектрические двигатели и не имеющие электрических передач.
Столь широкое, практически повсеместное, распространение электропривода обусловлено особенностями электрической энергии – возможностью экономично передавать ее на любые расстояния, постоянной готовностью к использованию, легкостью превращения в другие виды энергии.
В приборных системах сегодня используются электроприводы мощностью в единицы микроватт, мощность электропривода компрессора на перекачивающей газ станции – десятки мегаватт, т.е. диапазон мощности современных электроприводов превышает 10. Такой же порядок имеет диапазон частот вращения: в установках для выращивания кристаллов полупроводников вал двигателя должен делать один оборот за несколько часов при жестких требованиях к равномерности движения, тогда как частота вращения шлифовального круга может достигать 150 000 об/мин.
Но особенно широк диапазон применений современного электропривода – от искусственного сердца до шагающего экскаватора, от вентилятора или насоса до антенны радиотелескопа, от стиральной машины до гибкой производственной системы. Именно эта особенность – теснейшее взаимодействие с обслуживаемой технологической сферой – оказывала и оказывает на электропривод мощное стимулирующее влияние, определяет его развитие и совершенствование.
Дата добавления: 2016-01-30; просмотров: 4309;