Вторая форма условий равновесия.


Для равновесия произвольной плоской системы сил необходимо и достаточно, чтобы суммы моментов всех сил относительно двух точек А и В и сумма их проекций на ось ОX, не перпендикулярную прямой АВ, были равны нулю.
2.4.4 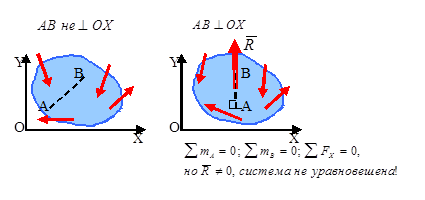 Третья форма условий равновесия.
Третья форма условий равновесия.

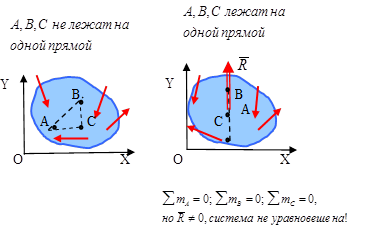
Для равновесия произвольной плоской системы сил необходимо и достаточно, чтобы суммы моментов всех сил относительно любых трех точек А, В и С, не лежащих на одной прямой, были равны нулю.
 Для проверки решения задачи на равновесие плоской системы сил составляют сумму моментов всех сил относительно других точек или строят в масштабе многоугольник всех сил, действующих на тело. Если проверочное уравнение обращается в тождество, а многоугольник сил замкнут, то задача решена верно.
Для проверки решения задачи на равновесие плоской системы сил составляют сумму моментов всех сил относительно других точек или строят в масштабе многоугольник всех сил, действующих на тело. Если проверочное уравнение обращается в тождество, а многоугольник сил замкнут, то задача решена верно.
Параллельные силы
 Система сил
Система сил  , линии действия которых параллельны друг другу и лежат в одной плоскости, называется плоской системой параллельных сил.
, линии действия которых параллельны друг другу и лежат в одной плоскости, называется плоской системой параллельных сил.
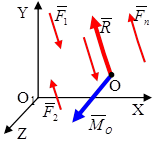
Пусть все силы лежат в плоскости О1XY.
При приведении этой системы сил к произвольному центру (точке) О получим главный вектор  , приложенный в точке О, и пару сил с моментом
, приложенный в точке О, и пару сил с моментом  .
.
Главный вектор системы параллельных сил параллелен силам:
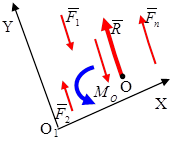

Момент пары сил равен главному моменту параллельных сил относительно центра приведения О и параллелен оси O1Z.
 .
.
Условия равновесия для плоской системы параллельных сил в векторной форме имеют вид:
 .
.
Расположим ось О1Y параллельно силам , тогда вектор перпендикулярен плоскости О1XY и его можно считать величиной алгебраической 
Отсюда следуют двеформы аналитических условий равновесия для системы параллельных сил на плоскости.
Дата добавления: 2016-01-29; просмотров: 1642;