Задание 3. Синтез следящей системы
Исходная нескорректированная система приведена на рис. 2.3, варианты задания − в табл. 2.3.
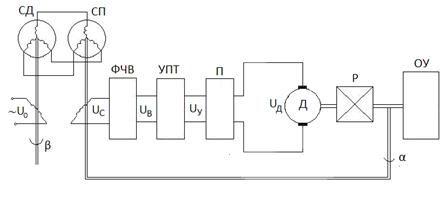
Рис. 2.3. Следящий электропривод на основе системы П-Д
Эта САУ по принципу действия не отличается от схемы, приведенной на рис. 2.1. Преобразователь П реально представляет собой тиристорный преобразователь, который выполняет функции усилителя мощности.
Таблица 2.3
| Наименование данных | Варианты | ||||||||||
| Электромагнитная постоянная време-ни якорной цепи Д, ТЭ, с | 0.08 | 0.1 | 0.06 | 0.09 | 0.1 | 0.05 | 0.08 | 0.05 | 0.12 | 0.1 | |
| Электромеханичес-кая постоянная времени Д, ТМ, с | 0.35 | 0.56 | 0.48 | 0.6 | 0.45 | 0.5 | 0.2 | 0.25 | 0.32 | 0.26 | |
| Постоянная времени П, ТП, с | 0.003 | 0.004 | 0.005 | 0.006 | 0.007 | 0.008 | 0.007 | 0.004 | 0.005 | 0.006 | |
| Коэффициент пе-редачи сельсинов KC, в/рад | |||||||||||
| Коэффициент пе-редачи УПТ, KУ | |||||||||||
| Коэффициент пе-редачи Д, KД, рад/с/В | 1.5 | 1.5 | 1.2 | 1.5 | 0.8 | ||||||
| Коэффициент пе-редачи Р, KР | 0.05 | 0.025 | 0.1 | 0.012 | 0.08 | 0.008 | 0.01 | 0.01 | 0.01 | 0.012 | |
| Коэффициент пе-редачи ФЧВ, KВ | 0.8 | 0.7 | 0.9 | 0.85 | 0.95 | 0.75 | 0.7 | 0.9 | 0.85 | 0.85 | |
| Коэффициент передачи П, KП | |||||||||||
| Максимальная ско-рость Ωм, град/с | |||||||||||
| Максимальное ус-корение εм, град/с2 | |||||||||||
| Максимальная ошибка eд, угл.мин | |||||||||||
| Перерегулирова- ние σ, % | |||||||||||
Время переходно-го процесса  , с , с
| 0.2 | 0.4 | 0.4 | 0.25 | 0.5 | 0.25 | 0.4 | 0.2 | 0.25 | 0.35 | |
- ЦЕЛЬ, СОДЕРЖАНИЕ И ОБЪЕМ КУРСОВОЙ РАБОТЫ
Выполнение курсовой работы является заключительным этапом обучения студентов по дисциплине «Теория автоматического управления» и имеет своей целью систематизацию, закрепление и расширение теоретических знаний и практических навыков самостоятельной работы с технической литературой и приобретение творческих навыков при решении технических задач.
Анализ исходных данных на проектирование и предлагаемых во Введении подходов синтеза САУ позволяет выделить следующие основные этапы проектирования:
Ø Построение структурной схемы нескорректированной системы и определение передаточных функций ее звеньев.
Ø Определение показателей качества исходной системы, в том числе, оценка точности, запаса устойчивости и быстродействия.
Ø Синтез внутренних контуров САУ методом последовательной коррекции с подчиненным регулированием координат.
Ø Синтез основного контура регулирования с использованием логарифмических частотных характеристик. На этом этапе обычно решаются три задачи:
- построение желаемой логарифмической амплитудно-частотной характеристики;
- оценка точности и динамических показателей качества желаемой системы;
- определение передаточной функции (ПФ) последовательного корректирующего устройства (фильтра).
Ø Реализация корректирующих устройств (регуляторов) всех контуров САУ в виде активных и пассивных фильтров.
Ø Оценка качества скорректированной системы.
Ø Построение функциональной схемы скорректированной системы.
Курсовая работа состоит из расчетно-пояснительной записки (РПЗ) объемом 23-25 листов формата А4 (с иллюстрациями). РПЗ должна содержать обоснование принятых решений, соответствующие расчеты на всех этапах проектирования, заключение по результатам проделанной работы, в том числе о соответствии полученных показателей качества САУ техническому заданию.
Дата добавления: 2016-01-26; просмотров: 617;