Задание 2. Синтез следящей системы
Исходная нескорректированная система представлена на рис. 2.2. Варианты задания приведены в табл. 2.2.
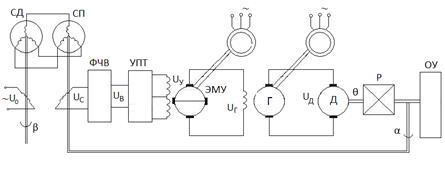
Рис. 2.2. Следящий электропривод на основе системы ЭМУ-Г-Д
Данная САУ отличается от следящей системы, приведенной рис. 2.1, наличием в канале управления генератора постоянного напряжения Г со своим приводным двигателем. Совместно с ЭМУ он выполняет роль усилителя мощности. Работает эта система так же, как и следящий электропривод, построенный на основе системы ЭМУ-Д.
Таблица 2.2
| Наименование данных | Варианты | |||||||||
| Постоянная вре-мени поперечной цепи ЭМУ, ТК, с | 0.2 | 0.3 | 0.4 | 0.5 | 0.6 | 0.65 | 0.55 | 0.45 | 0.35 | 0.25 |
| Постоянная време-ни якорной цепи Г и Д, ТЭ, с | 0.05 | 0.05 | 0.05 | 0.06 | 0.06 | 0.06 | 0.03 | 0.03 | 0.04 | 0.05 |
| Постоянная време-ни обмотки воз-буждения Г, ТГ, с | 0.25 | 0.3 | 0.35 | 0.35 | 0.3 | 0.25 | 0.2 | 0.2 | 0.2 | 0.12 |
| Электромеханичес-кая постоянная времени Д, ТМ, с | 0.4 | 0.5 | 0.6 | 0.4 | 0.5 | 0.6 | 0.5 | 0.3 | 0.4 | 0.4 |
| Постоянная време-ни обмотки управ-ления ЭМУ, ТУ, с | 0.006 | 0.005 | 0.007 | 0.006 | 0.005 | 0.007 | 0.006 | 0.005 | 0.007 | 0.006 |
| Коэффициент пере-дачи сельсинов KC, в/рад | ||||||||||
| Коэффициент пере-дачи УПТ, KУ | ||||||||||
| Коэффициент пере-дачи ЭМУ, KЭ | ||||||||||
| Коэффициент пере-дачи Д, KД, рад/с/В | 1.5 | 1.5 | 1.2 | 1.2 | ||||||
| Коэффициент пере-дачи Р, KР | 0.05 | 0.025 | 0.1 | 0.012 | 0.08 | 0.008 | 0.01 | 0.01 | 0.01 | 0.01 |
| Коэффициент пере-дачи ФЧВ, KВ | 0.7 | 0.9 | 0.8 | 0.75 | 0.85 | 0.95 | 0.7 | 0.8 | 0.95 | 0.85 |
| Коэффициент передачи Г, KГ | 1.5 | 1.5 | 1.5 | 1.5 | ||||||
| Максимальная ско-рость Ωм, град/с | ||||||||||
| Максимальное ус-корение εм, град/с2 | ||||||||||
| Максимальная ошибка eд, угл.мин | ||||||||||
| Перерегулирова- ние σ, % | ||||||||||
Время переходно-
го процесса  , с , с
| 0.2 | 0.5 | 0.25 | 0.2 | 0.15 | 0.15 | 0.5 | 0.2 | 0.3 | 0.5 |
Дата добавления: 2016-01-26; просмотров: 609;