Синтез следящей системы
Исходная нескорректированная система представлена на рис. 2.1. Варианты задания приведены в табл. 2.1.
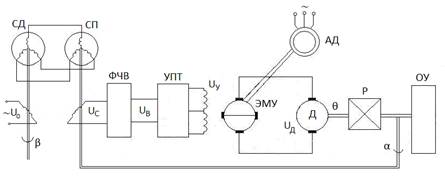
Рис. 2.1. Следящий электропривод на основе системы ЭМУ-Д
В функциональной схеме следящего электропривода обозначено: Д – электродвигатель постоянного тока независимого возбуждения, ЭМУ – электромашинный усилитель, СД – сельсин-датчик, СП – сельсин-приемник, ФЧВ – фазочувствительный выпрямитель, УПТ – усилитель постоянного тока, АД – асинхронный двигатель, Р – редуктор, ОУ – объект управления.
Задающим воздействием в этой схеме является угол поворота ротора сельсина-датчика β, регулируемой координатой − угол поворота выходного вала редуктора α, который измеряется сельсином-приемником. Пара СД и СП включены по трансформаторной схеме, которая позволяет формировать сигнал рассогласования (переменное напряжение UС), пропорциональный ошибке слежения  . Этот сигнал подается на ФЧВ, который выпрямляет напряжение UС с учетом его величины и фазы. Последняя определяется знаком δ, отсюда следует, что выходное напряжение фазо-чувствительного выпрямителя UВ имеет пропорциональную зависимость от ошибки δ.
. Этот сигнал подается на ФЧВ, который выпрямляет напряжение UС с учетом его величины и фазы. Последняя определяется знаком δ, отсюда следует, что выходное напряжение фазо-чувствительного выпрямителя UВ имеет пропорциональную зависимость от ошибки δ.
Постоянное напряжение UВ усиливается УПТ и подается в прямую и обратную обмотки управления ЭМУ в соответствие со знаком UВ. Электромашинный усилитель выполняет роль усилителя мощности. По существу – это двухкаскадный генератор постоянного напряжения, который приводится в движение от асинхронного двигателя. Последний питается от трехфазной сети и вращается с некоторой постоянной скоростью. Напряжение на выходе электромашинного усилителя UД пропорционально напряжению, подаваемому в обмотку управления UУ. Под действием напряжения UД двигатель вращается с определенной скоростью в прямом или обратном направлении в зависимости от знака UД.
Редуктор Р в следящих системах обычно существенно понижает обороты, т.е. его коэффициент передачи значительно меньше единицы. В данной системе объектом управления по существу является двигатель с редуктором, т.к. обратная связь организована по положению вала Р. Однако с учетом того, что ОУ жестко связан с валом Р можно считать, что объектом управления является система Д - ОУ. Работает САУ следующим образом. Если угол поворота  не изменяется, то α=β и δ=0, все напряжения UС, UВ, UУ, UД равны нулю и двигатель не вращается. При повороте вала СД на некоторый угол в ту или иную сторону возникнет рассогласование , появятся соответствующие напряжения, включая напряжение на двигате-
не изменяется, то α=β и δ=0, все напряжения UС, UВ, UУ, UД равны нулю и двигатель не вращается. При повороте вала СД на некоторый угол в ту или иную сторону возникнет рассогласование , появятся соответствующие напряжения, включая напряжение на двигате-
Таблица 2.1
| Наименование данных | Варианты | |||||||||
| Постоянная вре-мени поперечной цепи ЭМУ, ТК, с | 0.2 | 0.3 | 0.4 | 0.5 | 0.6 | 0.65 | 0.55 | 0.45 | 0.35 | 0.25 |
| Постоянная време-ни якорной цепи ЭМУ и Д, ТЭ, с | 0.05 | 0.08 | 0.05 | 0.08 | 0.03 | 0.06 | 0.09 | 0.1 | 0.15 | 0.1 |
| Электромеханичес-кая постоянная времени Д, ТМ, с | 0.02 | 0.25 | 0.15 | 0.3 | 0.2 | 0.3 | 0.25 | 0.15 | 0.18 | 0.15 |
| Постоянная време-ни обмотки управ-ления ЭМУ, ТУ, с | 0.006 | 0.005 | 0.007 | 0.006 | 0.005 | 0.007 | 0.006 | 0.005 | 0.007 | 0.006 |
| Коэффициент пе-редачи сельсинов KC, в/рад | ||||||||||
| Коэффициент пе-редачи УПТ, KУ | ||||||||||
| Коэффициент пе-редачи ЭМУ, KЭ | ||||||||||
| Коэффициент пере-дачи Д, KД, рад/с/в | 1.5 | 2.5 | 1.5 | |||||||
| Коэффициент пе-редачи Р, KР | 0.05 | 0.025 | 0.1 | 0.012 | 0.08 | 0.008 | 0.01 | 0.01 | 0.01 | 0.01 |
| Коэффициент пе-редачи ФЧВ, KВ | 0.7 | 0.8 | 0.9 | 0.95 | 0.85 | 0.75 | 0.8 | 0.9 | 0.75 | 0.85 |
| Максимальная ско-рость Ωм, град/с | ||||||||||
| Максимальное ус-корение εм, град/с2 | ||||||||||
| Максимальная ошибка eд, угл.мин | ||||||||||
| Перерегулирование σ, % | ||||||||||
Время переходно-го процесса  , с , с
| 0.8 | 0.8 | 0.4 | 0.4 | 0.7 | 0.7 | 0.6 | 0.5 | 0.4 | 0.25 |
ле Д. Последний начнет вращаться вместе с Р и СП в том же направлении, что и СД. Как только выполнится равенство α=β двигатель Д и редуктор Р остановятся. Если угол β изменять постоянно, то он будет отслеживаться системой с определенной ошибкой δ. Очевидно, чем выше скорость и ускорение входного вала β, тем больше ошибка слежения.
Дата добавления: 2016-01-26; просмотров: 755;