Динамическая модель машины.
Исследование движения машинного агрегата
В общем случае машинный агрегат состоит из двигателя, передаточного механизма (например, редуктор) и исполнительного механизма (рис.15.1).
Рис.15.1
Предполагаются уже известными размеры звеньев исполнительного льного механизма. Проведён геометро- кинематический анализ, известны аналоги скоростей, ускорений звеньев , массы и моменты инерции звеньев, средняя частота вращения ведущего звена исполнительного механизма.
Силы и пары сил, приложенные к машине можно разделить на следующие группы:
1. Движущие силы и моменты. Их направление совпадает с направлением движения звена, к которому они приложены. Они совершают за цикл положительную работу. Их величина определяется в процессе динамического анализа. При этом они могут приниматься постоянными или зависящими от скорости или перемещения.
2. Силы и моменты полезного сопротивления. Их направление противоположно направлению движения звена, к которому приложены. Они совершают за цикл отрицательную работу. Их величина должна быть задана в виде графиков или механических характеристик.
3. Силы трения в кинематических парах. Производят отрицательную работу. Их конечное действие можно учитывать через к.п.д. в кинематических парах.
4. Силы тяжести подвижных звеньев. На отдельных участках движения эти силы могут совершать как положительную, так и отрицательную работу. Однако за полный кинематический цикл работа сил тяжести равна нулю.
Динамическая модель машины.
Рассматривается машина, состоящая из исполнительного механизма ИМ (рис.15.1) и привода, включающего в себя двигатель Д и передачу П. При использовании в приводе электродвигателя ведущему звену 1 исполнительного механизма сообщается вращательное движение. Если механизм жесткозвенный и имеет одну степень свободы, то движение всех звеньев определяется движением одного ведущего звена. Таким образом, в качестве динамической модели машины может быть принято вращающееся звено 1 (рис.15.2), являющееся ведущим звеном исполнительного механизма. Положение его определяется углом поворота φ, а движение – угловой скоростью ω и угловым ускорением ε. При этом все силы, действующие на звенья машины, заменяются приведенным моментом Мпр, а массы и моменты инерции всех звеньев заменяются приведенным моментом инерции Jпр.
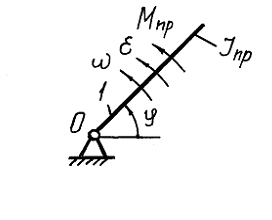 Рис.15.2
Рис.15.2
Приведение сил.
Операция приведения осуществляется для каждой силы Fiили момента Mi , действующих в машине, а затем приведенные моменты Мпрi cуммируются. При этом используется условие равенства элементарныхработ или мощностей. Если приводится сила Fi , то
 MПР i ω= Fi Vi соs αi ,
MПР i ω= Fi Vi соs αi ,
где Vi – скорость точки приложения силы Fi, ai - угол между векторами Fi и Vi. Откуда
MПР i =( Fi Vi соs αi)/ω = Fi Si ¢ соs αi (15.1)
Здесь S i¢ - аналог скорости точки приложения силы F i .
Если приводится момент М i, то МПР i ω = M i w i ,
где wi – угловая скорость звена, к которому приложен момент Мi. Тогда
МПР i =( Mi wi) / w . (15.2)
Общий приведенный момент
МПР =  ПР i.
ПР i.
В расчет принимаются только внешние силы (движущие, полезного сопротивления, тяжести). Из анализа формул (15.1) и (15.2) следует, что МПР,в общем случае, является переменным, зависящим от положения механизма и скорости:
Мпр = Мпр(j, w). (Зависимость от скорости дает движущий момент).
В качестве примера рассмотрим приведение сил, действующих на ползун 3 кривошипно-ползунного механизма (рис.15.3).
Расположение механизма определяется углом β между положительным направлением оси X и вектором силы тяжести (угол отсчитывается от оси X против часовой стрелки). Угол φ отсчитывается от положения ОА0 кривошипа, в котором ползун занимает крайнее дальнее положение. Отсчёт угла φ, направление угловой скорости ω против часовой стрелки считаются положительными.
Считаем известными длину кривошипа r = ОА, длину шатуна l = АВ, , массу ползуна m3 (массы кривошипа и шатуна не учитываем), силу полезного сопротивления Р.
Предварительно должен быть выполнен кинематический расчёт и определены аналоги скоростей ползуна S′.
Определим приведённый момент Мс силы сопротивления Р на ползуне ( с учётом его силы тяжести G3).
Знак силы Р определяется её направлением относительно оси X. Само направление силы сопротивления противоположно скорости ползуна. Используя зависимость (15.1), получим
Мс = (Р + G3 cos β) ∙ S′. (15.3)
Здесь G3 = 9,81∙ m3.
Все значения Р, S′подставляются вформулу (15.3) с учётом знаков. Знак силы G3 учтён в формуле (15.3), так как сила тяжести всегда направлена вниз.
Рис.15.3
Дата добавления: 2016-01-26; просмотров: 1543;