Уравнение движения машины.
Для составления уравнения движения машины может быть использована теорема об изменении кинетической энергии:
dT = dA ,(15.8)
где dT – изменение кинетической энергии машины,
dA – cумма работ всех внешних сил на бесконечно малом перемещении. Применительно к динамической модели машины это уравнение можно записать:
d  ) = Mпрdj.
) = Mпрdj.
Продифференцируем выражение в скобках, учитывая чтоJПР и w являются переменными, зависящими от j , а также, что w =  .
.
Jпр  +
+ 
 = Мпр. (15.9)
= Мпр. (15.9)
Таким образом, движение машины описывается дифференциальным уравнением, которое обычно не имеет общего аналитического решения.
Оно может быть решено лишь в некоторых частных случаях, либо приближенно при определенных упрощающих допущениях. В первую очередь это зависит от режима работы агрегата.
Основные режимы работы машинного агрегата.
Процесс движения машины в общем случае состоит из трёх фаз:
разбег , установившееся движение и выбег.(рис.15.4).
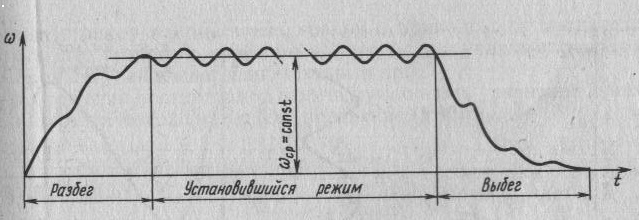
Рис.15.4
Разбег и выбег относятся к неустановившемуся режиму, который характеризуется непериодическими изменениями скорости главного вала (начального звена динамической модели).
При установившемся неравновесном режиме угловая скорость начального звена изменяется периодически . В частном случае скорость может быть постоянной (равновесное движение).
В установившемся режиме работает большинство технологических и энергетических машин.
Анализ установившегося движения машинного агрегата.
Расчёт маховика.
Технологические машины выполняют технологический процесс в установившемся режиме, который обычно не имеет ограничений по продолжительности. Для машин, содержащих рычажные механизмы, этот режим является неравновесным, при котором кинетическая энергия изменяется периодически, т.е. её значения повторяются через время цикла tц (рис. 16.1). При этом угловая скорость ведущего звена также меняется периодически в зависимости от его положения (рис. 16.2). При этом характер изменения графиков кинетической энергии и угловой скорости обычно не соответствуют друг другу. Периодом изменения, обычно, является один оборот (2p радиан или 3600). Такое движение характеризуют средней угловой скоростью wСР и коэффициентом неравномерности
d =  . (16.1)
. (16.1)
Величина коэффициента неравномерности в технологических машинах мала (d= 0,03…0,05), так как только при этом условии обеспечивается нормальная работа привода. Малость d позволяет использовать при решении уравнения движения приближенные методы.
В данном случае вместо уравнения (15.8) используется
уравнение движения в интегральной форме
 Т = Т - Тн =
Т = Т - Тн =  А . (16.2)
А . (16.2)
Здесь Т и Тн –кинетические энергии машинного агрегата в произвольном и начальном положениях. За начальное положение целесообразно брать то, в котором ведомое звено занимает крайнее положение и его скорость равна 0.
А – сумма работ на данном участке всех внешних сил и моментов. Работа сил трения здесь не учитывается.
Рис.16.1
Рис.16.2
Для динамической модели (рис.15.2) после приведения сил и масс уравнение (16.2) приобретает вид
0,5 · J · ω2 - 0,5 · (  )2 · Jн = Ад + Ас . (16.3)
)2 · Jн = Ад + Ас . (16.3)
Здесь АД =  Мдdφ -работа движущих сил на участке;
Мдdφ -работа движущих сил на участке;
 АС = Мсdφ -работа сил сопротивления и сил тяжести на участке. Величина АС при расчётах обычно бывает отрицательной.
АС = Мсdφ -работа сил сопротивления и сил тяжести на участке. Величина АС при расчётах обычно бывает отрицательной.
Для упрощения записи здесь и далее опускаем значок «пр» при приведённых моментах движущих сил МД , сил сопротивления МС и приведённых моментах инерции .
Анализ уравнения (16.3) показывает, что причинами колебаний угловой скорости ведущего звена механизма являются:
а) несоответствие величин приведённого момента МД движущих сил и приведённого момента МС сил сопротивления. Это приводит к появлению избыточной работы
Аи = Ад + Ас . (16.4)
б) непостоянство приведённого момента инерции динамической модели при наличии в механизме масс, совершающих возвратно-поступательное, качательное и сложно-плоское движения.
Величина и характер изменения сил сопротивления задаются при проектировании. Следовательно, путём интегрирования можно в каждом положении механизма определить величину работы Ас. Обозначим работу Ас за период (один оборот кривошипа )  .
.
При установившемся неравновесном движении движущие силы или моменты за период совершают одинаковую работу, т. е.  = - .
= - .
Момент движущих сил МД зависит от угловой скорости ω, однако при малых изменениях скорости можно приближённо принять МД = соnst.
Тогда АД = МД · φ, где 0 ≤ φ ≤ 2π.
Величина движущего момента МД = ( ) / 2π. (16.5)
Изменение кинетической энергии агрегата, равное избыточной работе, определится по зависимости:
Т = АИ = МД · φ + МС dφ. (16.6)
Подставляя в уравнение движения (16.3) зависимости (15.7) и (16.2), после преобразований можно получить
Т = ТС + ТV . (16.7)
Здесь Тc = 0,5Jc (ω2 -  ) (16.8)
) (16.8)
Тc - изменение кинетической энергии вращающихся масс;
ТV= 0,5·JV·ω2 - 0,5·JVн·  - изменение кинетической энергии масс, совершающих сложно-плоское и возвратно-поступательное движения.
- изменение кинетической энергии масс, совершающих сложно-плоское и возвратно-поступательное движения.
Из-за малости коэффициента неравномерности хода (δ = 0,03…0,05) справедливо приближённое равенство ω ≈ ω н ≈ ω ср .
Поэтому можно принять:
Тv ≈ 0,5 •  (Jv - Jvн). (16.9)
(Jv - Jvн). (16.9)
Отсюда находится в каждом положении механизма приращение кинетической энергии вращающихся масс:
ТC = Т - ТV . (16.10)
Величина ТC, периодически меняясь, достигает в каких-то положениях максимальных  и минимальных
и минимальных  значений. Соответственно, в этих положениях угловая скорость будет достигать также значений ωmax и ωmin. Используя зависимости (16.10), (16.9), (16.6), (16.1), считая приближённо
значений. Соответственно, в этих положениях угловая скорость будет достигать также значений ωmax и ωmin. Используя зависимости (16.10), (16.9), (16.6), (16.1), считая приближённо
ωср = 0,5(ωmax + ωmin ), можно получить, что наибольший перепад кинетической энергии вращающихся масс
 =
=  -
-  = JС ∙ δ ∙
= JС ∙ δ ∙  . (16.11)
. (16.11)
Если при проектировании задана величина коэффициента неравномерности δ, то из зависимости (16.11) находится необходимая для этого величина Jc приведённого момента инерции вращающихся масс:
Jc = / (δ ∙ ). (16.12)
Величина Jc, получаемая из зависимости (16.12), обычно не может быть обеспечена за счёт приведённого момента инерции Jco имеющихся вращающихся масс агрегата. В этом случае на ведущем валу исполнительного механизма устанавливается маховик с моментом инерции:
JМ = Jc – Jco . (16.13)
Маховик (рис.16.3 ) представляет собой отбалансированное колесо, масса которого сосредоточена, в основном, на ободе. Он является аккумулятором кинетической энергии. Когда работа двигателя оказывается в избытке, маховик накапливает кинетическую энергию, которая потом используется при выполнении технологического процесса. Чем больше Jc (а следовательно, и JМ), тем выше аккумулирующая способность маховика, тем меньше будут колебания ω при колебаниях потока кинетической энергии, тем равномернее будет вращаться ведущее звена механизма.
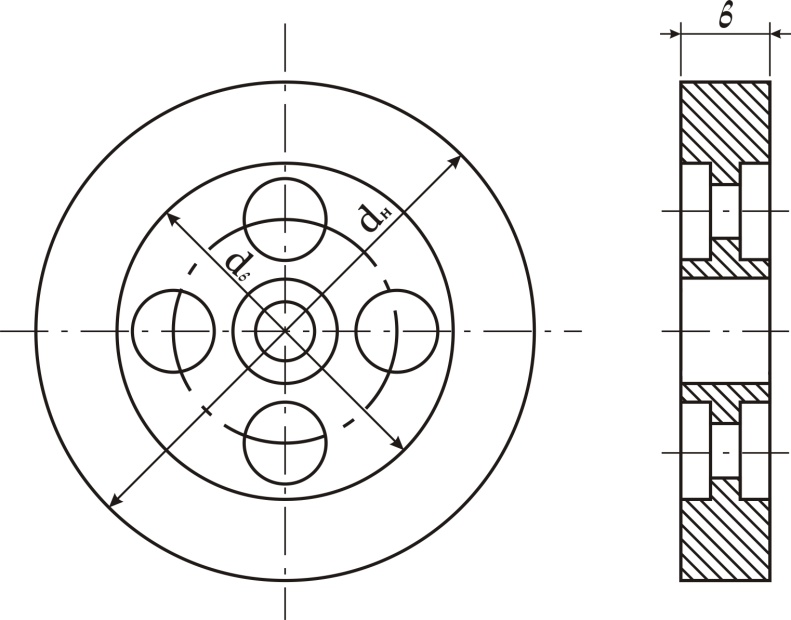 Рис.16.3
Рис.16.3
Отклонение угловой скорости от её среднего значения ωср можно найти, так как известно приращение  кинетической энергии в положении, где ω=ωср .
кинетической энергии в положении, где ω=ωср .
= 0,5( +  ). (16.14)
). (16.14)
В каждом положении ТС -  =
=  - .
- .
Раскрывая это уравнение, получаем
 (16.15)
(16.15)
Представим ω = ωср + Δω. (16.16)
Из уравнения (16.15), используя зависимость (16.16) и принимая приближённо Δω2 = 0, после преобразований получим:
Δω = ( ТС - ) / (ωср ∙ JC) . (16.17)
Следует отметить, что в данных методических указаниях рассматривается решение уравнения движения для случая, когда не учитывается влияние колебаний угловой скорости на величину движущего момента двигателя.
Однако, имеются машины, в которых влияние скорости на силы и моменты достаточно сильно. К ним относятся, например, асинхронные и шунтовые двигатели, получившие большое распространение в промышленном электроприводе.
В этом случае приведённое выше решение может быть принято, как первое приближение. Уточнённое решение, которое можно получить методом последовательного приближения, приводится в работах [1], [4] . Оно всегда даёт решение с несколько меньшей величиной JC . Это позволяет использовать маховики с меньшим моментом инерции, а следовательно, с меньшими габаритами и металлоёмкостью.
Лекция №17.
Анализ неустановившегося движения машинного агрегата.
Неустановившейся режим имеет место, когда агрегат пускают в ход и он, набирая скорость, выходит на установившейся режим, а также когда для остановки машины её двигатель отключают и она продолжает двигаться за счёт накопленного запаса кинетической энергии; при этом машина постепенно теряет скорость из-за действия сил трения или каких-либо сил сопротивления, в том числе и специальных тормозных сил (рис.17.1).
Рис.17.1
В этих случаях нужно знать, насколько быстро происходит переход из неподвижного состояния в рабочее и обратный процесс до полной остановки.
Применительно к транспортным и грузоподъёмным машинам это важно для определения времени разбега и выбега (торможения) , расчёта длины тормозного пути.
Разбег и торможение могут происходить с большим ускорением. Это вызывает значительное динамическое нагружение механизма, что, в свою очередь, может привести к перенапряжениям и даже к поломкам.
Во время разбега и выбега угловая скорость многих машин может проходить через критическую (резонансную) зону. Во избежание динамической перегрузки механизма и возможной аварии проход этой зоны должен быть достаточно быстрым, что надо обеспечить при проектировании, сделав расчёт обеих фаз неустановившегося режима.
При анализе неустановившегося режима следует использовать уравнение движения машинного агрегата в дифференциальной форме (15.9).
Оно выглядит следующим образом:
Jпр + = Мпр. (17.1)
Здесь: Jпр – приведённый к ведущему звену момент инерции всех подвижных звеньев механизма;
Мпр- приведённый момент всех учитываемых сил, действующих в агрегате.
Для определения закона движения при неустановившемся режиме должны быть известны следующие данные: кинематическая схема и размеры механизма; массы и моменты инерции звеньев; механические характеристики сил и моментов; начальные условия движения.
Рассмотрим случай работы агрегата при следующих условиях:
а) Приведённый к ведущему звену момент инерции всех подвижных звеньев механизма Jпр=const.;
б) Механическая характеристика момента движущих сил- линейна (рис.17.2) и представляется (рис.17.2) в виде:
МД= М0- b*ω , (17.2)
где : М0 – пусковой момент двигателя;
b – коэффициент, характеризующий крутизну спада характеристики;
МН – номинальный развиваемый момент движущих сил, соответствующий номинальной угловой скорости ωН;
в) Приведённый момент сил сопротивления МС= const. (рис.17.2)
(силы трения не учитываются);
г) Предполагается, что двигатель подобран таким образом, что МС=МН,
а ωН соответствует угловой скорости ωуст установившегося режима работы агрегата.
М
М0 МД
МС
МН А
0 ωН = ωУСТ. ω
Рис.17.2
Типичным примером для таких условий является работа при пуске и торможении многих грузоподъёмных устройств с приводом от шунтового двигателя постоянного тока.
В соответствии с заданными условиями уравнение (17.1) запишется в виде:
Jпр = М0- b*ω -МС. (17.3)
Из равенства в точке А моментов МД и МС
коэффициент b=(М0-МС)/ωН (17.4)
Подставляя выражение (17.4) в уравнение движения (17.3) после преобразований получаем:
dt=(Jпр/(m0-mC)*( dω/(1-ω/ωН)) (17.5)
Используем табличный интеграл : ∫  =(1/b)* ln (a+bx) и
=(1/b)* ln (a+bx) и

интегрируем уравнение (17.5):
t=-T * ln(1- ω/ ωуст) + C, (17.6)
где Т= Jпр * ωуст /(m0-mC) (17.6)
С- постоянная интегрирования.
При t=0, ω=0 . Следовательно С=0.
Преобразовывая уравнение (17.6), получаем уравнение движения агрегата при разгоне:
ω= ωуст(1-е-t/T) (17.7)
График изменения угловой скорости при разгоне представлен на рис.17.3.
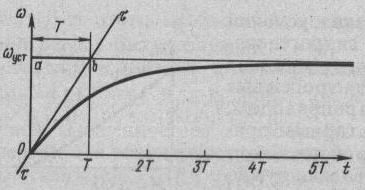
Рис.17.3
Величина Т , определяемая по формуле (17.6), называется постоянной времени машинного агрегата. Графически на рис.17.3 она представляет собой отрезок ab. Физический смысл её в следующем. Если бы в процессе разгона разница (МД-МС) не уменьшалась, а оставалась бы равной М0 (как в начальный момент), то движение было бы равноускоренным, а угловая скорость достигала бы значения ωуст через время Т.
Теоретически разгон продолжается бесконечно долго. Однако уже при t=3Т отношение ω/ ωуст составит 0,95, при t=4Т оно возрастёт до 0,98, а при t=5Т до 0,995, то есть процесс разгона при t=(4-5)Т практически завершается. Отсюда следует, что если задать время разгона, то можно определить соответствующую величину Jпр, при которой процесс разгона действительно займёт заданное время.
Дата добавления: 2016-01-26; просмотров: 2920;