Методы измерений и ошибки измерения
Различают два основных метода измерений: метод непосредственной оценки и методсравнения.
Метод непосредственной оценки
Суть данного метода состоит в том, что значение физической величины определяется непосредственно на выходе измерительного прибора или регистрирующего устройства при прямом измерении.
Метод сравнения
При методе сравнения измеряемая величина сравнивается с мерой – некоторой известной или заданной величиной. Здесь различают:
- дифференциальный (разностный) метод, когда на измерительный прибор воздействует разность измеряемой и заданной величины (устройство сравнения, где e(t) =x(t) - y(t));
- нулевой (компенсационный), при котором эффект воздействия измеряемой и известной величин на прибор, где происходит их сравнение, доводится до нулевого значения;
- метод совпадений, заключающийся в том, что разность между измеряемой и заданной величинами измеряют, используя совпадения показаний регистрирующих устройств приборов или периодических сигналов;
- метод замещения, когда измеряемую величину замещают известной величиной;
- метод противопоставлений, если измеряемая величина и известная (задаваемая) величина одновременно воздействует на прибор сравнения, при помощи которого устанавливают соотношения между ними.
Точность измерения физических величин (контролируемых и задаваемых) характеризуется ошибками измерения.
Из электротехники известны абсолютная, относительная и приведенная ошибки измерений, присущие электроизмерительным проборам. Максимальное значение этих ошибок определяет класс точности измерительного прибора. Данные ошибки также присущи системам автоматического (автоматизированного) контроля, используемым в АСУ и АСУТП. Кроме того, в автоматике большое значение имеют динамическая и статическая ошибки.
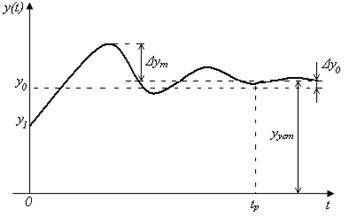
Динамическая ошибка – это максимальное отклонение Dym регулируемой величины y(t) от ее установившегося значения yуст на выходе САР при переходном процессе (Рис.10.1).
Статическая ошибка (Dy0) – это разность между заданным y0 и установившимся yуст значениями регулируемой величины y(t) в установившемся режиме работы САР.
Очевидно, что значения этих ошибок будут определяться не только характеристиками устройств измерения, но и другими элементами САР.
Динамическая и статическая ошибки позволяют количественно оценивать эксплуатационные характеристики САР.
|
| Рис. 10.1 – Переходный процесс в САР: y(t) – регулируемая величина; y1 – исходное значение регулируемой величины y(t); y 0 – заданное (требуемое) значение y(t); yуст – установившееся значение y(t); t р - время регулирования (переходного процесса; Dym - динамическая ошибка; Dy0 – статическая ошибка |
Дата добавления: 2016-01-18; просмотров: 1652;