Типы измерительных преобразователей
Элементами систем, обеспечивающих получение информации, являются измерительные преобразователи (ИП). В автоматике также используют термины «первичный преобразователь» или «датчик». Термин «первичный преобразователь» удобно использовать при описании принципа действия того или иного измерительного устройства, а термин «датчик» - при пояснении конструктивного исполнения. В отличие от измерительных приборов, где такая информация представлена в виде, удобном для непосредственного восприятия оператором, информация от ИП поступает в виде определенной физической величины, удобной для передачи и дальнейшего преобразования в системе автоматики. Эту величину называют сигналом, и она однозначно связана с контролируемой физической величиной или параметром того или иного технологического процесса.
Для большинства ИП характерно измерение электрическими методами не только электрических и магнитных, но и других физических величин. При этом используется предварительное преобразование неэлектрической величины в электрическую. Такой подход обусловлен достоинствами электрических измерений: электрические сигналы просто и быстро передаются на большие расстояния; легко, быстро и точно преобразуются в цифровой код; позволяют обеспечить высокую точность и чувствительность.
Существует множество типов ИП, количество которых значительно превосходит число измеряемых величин, так как одну и ту же физическую величину можно измерять различными методами и датчиками разных конструкций.
Согласно ГСП все контролируемые величины разбиты на пять следующих групп: теплоэнергетические, электроэнергетические, механические величины, химический состав и физические свойства.
Теплоэнергетические величины: температура, давление, перепад давлений, уровень и расход.
Электроэнергетические величины: постоянные и переменные ток и напряжение, мощность (активная и реактивная), коэффициент мощности, частота и сопротивление изоляции.
Механические величины: линейные и угловые перемещения, угловая скорость, деформация усилия, вращающие моменты, число изделий, твердость материалов, вибрация, шум и масса.
Химические свойства: концентрация, состав и др.
Физические свойства характеризуют следующие величины: влажность, электропроводность, плотность, вязкость, освещенность и др.
Устройства, в которых однократно (первично) преобразуется измеряемая физическая величина, принято называть первичными ИП. Они могут соединяться, образуя следующие структурные схемы: однократного прямого преобразования; последовательного прямого преобразования; дифференциальную; с обратной связью (компенсационную).
Для эффективного функционирования ИП должны отвечать ряду требований, основными из которых являются:
- высокая статическая и динамическая точность работы, обеспечивающая формирование выходного сигнала с минимальными искажениями;
- высокая избирательность - датчик должен реагировать только на изменения той величины, для измерения которой он предназначен;
- стабильность характеристик во времени; отсутствие влияния нагрузки в выходной цепи на режим входной цепи;
- высокая надежность при работе в неблагоприятных условиях внешней среды; повторяемость характеристик (взаимозаменяемость);
- простота и технологичность конструкции; удобство монтажа и обслуживания;
- низкая стоимость.
Датчики
Датчик (измерительный преобразователь) – это устройство, воспринимающее регистрируемый параметр и преобразующее его в физическую величину, удобную для использования в последующих элементах автоматической системы.
Различают три класса датчиков:
- аналоговые датчики, т. е. датчики, вырабатывающие аналоговый сигнал;
- цифровые датчики, генерирующие последовательность импульсов или двоичное слово;
- бинарные (двоичные) датчики, которые вырабатывают сигнал только двух уровней «включено/выключено» (0 или 1).
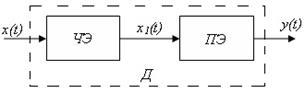
В общем виде датчик представляют в виде двух функциональных элементов – чувствительного элемента (ЧЭ) и преобразующего элемента (ПЭ) (Рис. 10.2)
Наиболее распространенные в автоматике и телемеханике датчики преобразуют неэлектрический контролируемый параметр x(t) в электрическую величину y(t) – напряжение, ток, ЭДС или неэлектрическую величину в другую неэлектрическую величину, удобную для дальнейшего использования, например: температуру в давление, уровень в давление и т. д.
|
| Рис. 10.2 – Функциональная схема датчика: Д – датчик; ЧЭ – чувствительный элемент; ПЭ – преобразующий элемент; x(t) – контролируемый параметр; x1(t) – выходная величина ЧЭ; y(t) – выходная физическая величина |
Электрические датчики могут быть параметрическими и генераторными.
Параметрические датчики функционируют на основе зависимости основного его параметра (сопротивления, емкости или индуктивности) от измеряемой величины. Для работы параметрических датчиков необходим источник электрической энергии постоянного или переменного тока. К таким датчикам относятся: контактные, реостатные, потенциометрические, тензодатчики, емкостные, индуктивные, фоторезисторные и др.
Генераторные датчики формируют на выходе ЭДС или напряжение, функционально связанные с входным параметром. Примерами таких датчиков являются: термопара, полупровод-никовый фотоэлемент, пьезодатчик, индуктивный датчик и др.
Неэлектрические датчики подразделяются на механические, пневматические, гидравлические и др.
В технической литературе, как правило, датчики классифицируют по двум основным признакам – по виду измеряемой величины (контролируемого параметра) и по принципу действия.
Большинство датчиков с преобразователем, применяемых в системах управления, генерируют аналоговый сигнал, то есть являются аналоговыми.
Бинарные датчики используются для определения положения при механических перемещениях, для подсчета элементов в дискретных потоках (например, числа бутылок на выходе линии розлива), для контроля достижения предельных значений уровня или давления или крайних положений подвижных частей.
Цифровые датчики генерируют дискретные выходные сигналы, например, импульсные последовательности или представленные в определенном коде цифровые данные, которые непосредственно могут быть считаны процессором.
В зависимости от типа датчика выходной сигнал либо сразу формируется в цифровом виде (например, от датчика положения вала), либо должен обрабатываться цепями электронной логики, которые обычно составляют с ним одно целое. Измерительная головка цифрового датчика такая же, как и у аналогового.
Существуют интегрированные цифровые датчики, которые включают микропроцессоры для выполнения числовых преобразований и согласования сигнала и вырабатывают цифровой или аналоговый выходной сигнал.
Если выходной сигнал датчика представляет собой последовательность импульсов, то они обычно суммируются счетчиком. В другом варианте можно измерять интервал между импульсами. Затем результат в виде цифрового слова передается на дальнейшую обработку.
По виду регистрируемого параметра различают датчики: температуры, давления, влажности, линейного перемещения, угловой скорости, углового ускорения, освещенности и т. д.
По принципу действия датчики подразделяются на: механические, потенциометрические, электромагнитные, емкостные, пьезоэлектрические, фотоэлектрические, ультразвуковые, манометрические электроконтактные и др.
Основными характеристиками и параметрами датчиков являются: статическая характеристика, чувствительность, порог чувствительности, динамические показатели, погрешность преобразования, выходная мощность (напряжение, ток); выходное сопротивление и т. д.
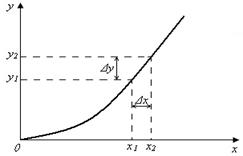
Статической характеристикой датчика называют функциональную зависимость, связывающую выходную и входную величины, т. е. y = f(х). Она может быть задана в виде табличных значений величин х и y, в виде графической зависимости (Рис. 10.3) или в виде функциональной зависимости.
|
| Рис. 10.3 – Статическая характеристика |
Чувствительность (коэффициент преобразования) КС – это отношение выходной величины y к входной величине х.
Ввиду того, что в общем случае зависимость y = f(х) не является линейной, то величина КС для различных значений входной величины х не будет постоянной, то есть
 .
.
При этом удобнее пользоваться так называемой дифференциальной чувствительностью
 ,
,
которая для разных точек зависимости y = f(х) будет также различной, то есть
 ,
,  .
.
Практически дифференциальную чувствительность определяют для разных областей статической характеристики, как
 .
.
Если зависимость y = f(х) линейна, то статическая чувствительность будет иметь постоянное значение
 .
.
Динамические свойства датчиков оценивают, пользуясь временными или частотными характеристиками.
Погрешности датчиков – абсолютную погрешность, относительную и приведенную относительную погрешности – определяют аналогично, как и для электроизмерительных приборов.
Дата добавления: 2016-01-18; просмотров: 4112;