Инерционного конвейера. Исходные данные для определения момента инерции маховика приведены в разделе 6.3.
Исходные данные для определения момента инерции маховика приведены в разделе 6.3.
При определении приведенного момента инерции механизма конвейера (см. рис. 32) следует учитывать, что передача движения от двигателя к звену приведения – кривошипу осуществляется через редуктор, так как частота вращения двигателя nдв = 1260 об/мин, кривошипа – n1 = 63 об/мин. Соответственно угловые скорости этих звеньев равны:
 ;
; 
Следует заметить, что при определении приведенного момента инерции механизма, кинетическая энергия коромысла (на рис. 32 звена 3) может быть определена двумя способами – с определением момента инерции этого звена относительно оси вращения С по формуле (38) Гюйгенса-Штейнера или представляя ее как сумму кинетических энергий при вращательном движении звена относительно центра масс S3 с угловой w3 и поступательном движении центра масс с линейной скоростью  .
.
В первом случае момент инерции звена 3 относительно оси вращения С
 ,
,
и кинетическая энергия звена 3, определяемая по первому способу,
или
 .
.
Такая же формула, как следует из приведенного комментария, получается и при определении кинетической энергии звена 3 по второму способу.
Вместе с тем, более логичным является определение кинетической энергии звена 3 по первому способу, так как это звено совершает только вращательное движение. Определение кинетической энергии по второму способу больше соответствует звеньям, совершающим сложное движение, которое может быть разложено на два движения – вращательное вокруг центра масс и переносное вместе с центром масс.
Тогда в соответствии с формулой (16) выражение для определения приведенного момента инерции механизма конвейера принимает вид
 . (75)
. (75)
Постоянная часть приведенного момента инерции механизма  кгм2. Переменная часть представляет собой выражение в квадратных скобках правой части формулы (75). В этом выражении масса m5 представляет собой суммарную массу желоба mЖ и перемещаемого груза mГ. При движении желоба в направлении перемещения груза m5 = mЖ + mГ при движении в обратном направлении m5 = mЖ.
кгм2. Переменная часть представляет собой выражение в квадратных скобках правой части формулы (75). В этом выражении масса m5 представляет собой суммарную массу желоба mЖ и перемещаемого груза mГ. При движении желоба в направлении перемещения груза m5 = mЖ + mГ при движении в обратном направлении m5 = mЖ.
По полученным значениям строим график JП(j) приведенного момента инерции механизма в системе координат JПОJj (рис. 38, а). На основании графиков приведенных моментов и работ сил движущих и сил сопротивления (рис. 38, б, в) строим график изменения кинетической энергии DТ(j) (рис. 38, г) и диаграмму «энергия-масса» DТ(JП) (рис. 38, д). Полученные по формулам (68) значения tgYмин и tgYмакс равны
tgYмин 
tgYмакс 
Соответственно углы Yмин = 85,6° и Yмакс = 87,1°.
Учитывая, что эти углы близки к 90º, касательные к диаграмме «энергия-масса» пересекают ось абсцисс в точках G и F (см. рис. 38, д) и положение точек пересечения касательных с осью ординат находится далеко за пределами чертежа. Поэтому при определении момента инерции маховика по формуле (71) длину отрезка (mn) определим по формуле (74). Длину отрезков (OF) и (OG) принимаем по чертежу (рис. 38, д): (OF) = 44 мм; (OG) = 9,5мм.
Соответственно отрезок
(mn) = 44·12,95 - 9,5·19,42 = 385,3 мм
и момент инерции маховика механизма инерционного конвейера
 кгм2.
кгм2.
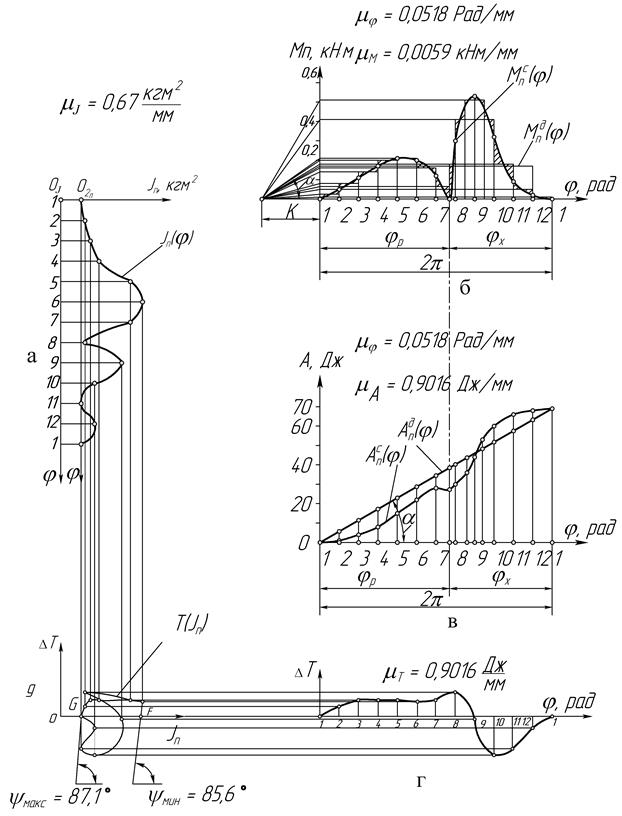
Рисунок 38 – Графическая часть динамического синтеза
механизма инерционного конвейера
Дата добавления: 2016-01-07; просмотров: 1237;