Обработка нагрузочной диаграммы вытяжного пресса
Вытяжные прессы применяются для штамповки и вытяжки различных изделий из листового материала. Структурная схема механизма и нагрузочная диаграмма вытяжного пресса представлены на рис. 20, а, б. Основными технологическими деталями пресса являются матрица (стойка), внутри которой перемещается пуансон 5 (рис. 20, а).
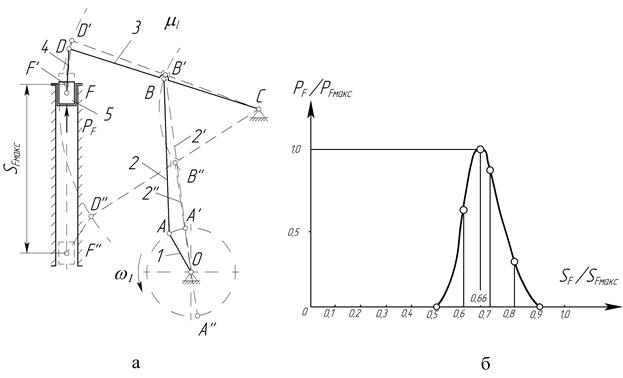
Рисунок 20 – Структурная схема механизма (а) и заданная нагрузочная
диаграмма (б) вытяжного пресса
Для вытяжки листовая заготовка закрепляется на матрице, и при движении пуансона вниз лист вытягивается, например, в чашеобразное изделие, которое образуется в пространстве между стенками пуансона и матрицы. При вытяжке на пуансон со стороны изделия действует реактивная сила PF, которая представляет собой силу сопротивления.
Заданная нагрузочная диаграмма (рис. 20, б) представлена в относительных координатах РF/PFмакс и SF/SFмакс. При этом заданы: максимальное усилие вытяжки PFмакс и положение пуансона при этом усилии; кинематическая схема механизма пресса; номинальная угловая скорость w1, принимаемая постоянной, и массовые характеристики звеньев. За звено приведения принимается кривошип ОА.
Полный ход пуансона SFмакс определяется при построении планов положений механизма по расстоянию между крайними верхним F¢ и нижним F² положениям пуансона 5 (рис. 20, а), умноженному на масштабный коэффициент ml длин звеньев. На рис. 21 показаны крайние положения кривошипа ОА¢ и ОА¢¢.
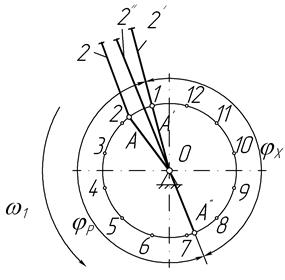
Рисунок 21 – Положения кривошипа ОА, ОА¢, ОА¢¢ в промежуточном F
и крайних F¢, F¢¢ положениях ползуна
Для определения параметров и построения расчетной нагрузочной диаграммы предварительно строится диаграмма нагружения пресса РF(SF) в зависимости от перемещения пуансона (звена 5) за цикл установившегося движения (рис. 22). Диаграмма строится в стандартных единицах – по оси абсцисс в метрах, по оси ординат – в Ньютонах. Эта диаграмма соответствует полному перемещению пуансона вниз и вверх на расстояние 2SFмакс при рабочем и холостом ходах. На диаграмме РF(SF) наносят точки, соответствующие положениям пуансона, в которых определяются усилия вытяжки. По этим положениям пуансона обратным построением планов механизма определяют угловые положения кривошипа ОА и по ним строят расчетную нагрузочную диаграмму  (j) (рис. 23).
(j) (рис. 23).
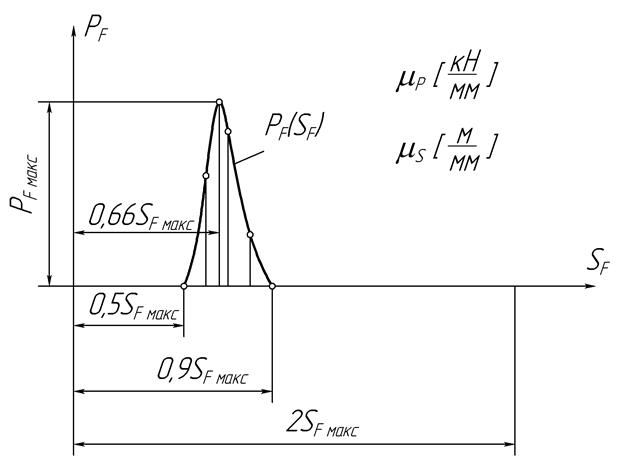
Рисунок 22 – Диаграмма нагружения пресса в зависимости
от перемещения пуансона
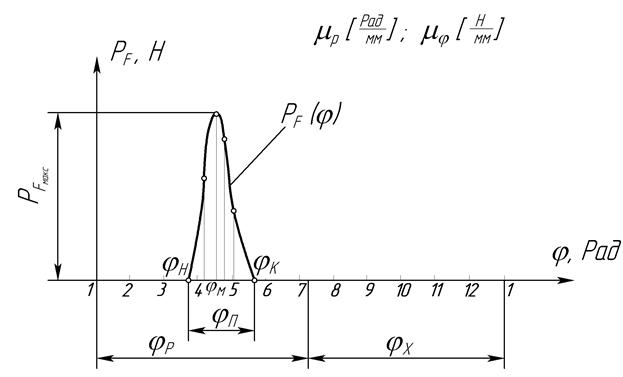
Рисунок 23 – Расчетная нагрузочная диаграмма вытяжного пресса
При построении расчетной нагрузочной диаграммы за начальное положение принимается положение механизма, соответствующее положению F¢ ползуна 5 (рис. 20, а) в начале его рабочего хода вниз и расположению кривошипа ОА на одной линии ОА¢В¢ с шатуном А¢В¢. Нагружение ползуна при вытяжке с усилием  происходит при вращении кривошипа ОА против хода часовой стрелки и в соответствии с заданной нагрузочной диаграммой (рис. 20, б) начинается на половине полного хода ползуна 0,5SFмакс и продолжается до значения хода SF = 0,9 SFмакс (рис. 22). Полный ход ползуна при рабочем ходе соответствует повороту кривошипа из положения ОА¢ в положение ОА¢¢ на угол jр, при холостом ходе – на угол jх (рис. 21). При этом jр>jх и jр + jх = 2p.
происходит при вращении кривошипа ОА против хода часовой стрелки и в соответствии с заданной нагрузочной диаграммой (рис. 20, б) начинается на половине полного хода ползуна 0,5SFмакс и продолжается до значения хода SF = 0,9 SFмакс (рис. 22). Полный ход ползуна при рабочем ходе соответствует повороту кривошипа из положения ОА¢ в положение ОА¢¢ на угол jр, при холостом ходе – на угол jх (рис. 21). При этом jр>jх и jр + jх = 2p.
Нагружение пуансона происходит на ограниченном угле поворота кривошипа jП в пределах от угла jН начала нагружения до угла jК окончания нагружения (рис. 24). В остальных положениях сила и приведенный момент сил сопротивления  , создаваемый этой силой, равны нулю. Поэтому при определении и построении графика
, создаваемый этой силой, равны нулю. Поэтому при определении и построении графика  без учета сил веса звеньев достаточно построить планы положений и повернутые планы скоростей (рычаги Жуковского) механизма в пределах угла jП, для них определить значения и построить график . На рис. 25 в качестве примера показан рычаг Жуковского для угла jМ поворота кривошипа (рис. 24), соответствующего максимальному значению усилия PFмакс при SF = 0,66SFмакс (см. рис. 22). Из рычагов Жуковского определяются приведенные силы сопротивления
без учета сил веса звеньев достаточно построить планы положений и повернутые планы скоростей (рычаги Жуковского) механизма в пределах угла jП, для них определить значения и построить график . На рис. 25 в качестве примера показан рычаг Жуковского для угла jМ поворота кривошипа (рис. 24), соответствующего максимальному значению усилия PFмакс при SF = 0,66SFмакс (см. рис. 22). Из рычагов Жуковского определяются приведенные силы сопротивления  , прикладываемые в кинематической паре А перпендикулярно кривошипу. Для угла jМ приведенная сила сопротивления
, прикладываемые в кинематической паре А перпендикулярно кривошипу. Для угла jМ приведенная сила сопротивления
 ,
,
где (pM fM) и (pM aM) – отрезки в миллиметрах, представляющие собой скорости точек F и A механизма на повернутом плане скоростей (рис. 25).
Следует иметь ввиду, что моменты от сил  и PFмакс должны совпадать по направлению. Приведенные моменты сил сопротивления для каждого положения определяются по формуле
и PFмакс должны совпадать по направлению. Приведенные моменты сил сопротивления для каждого положения определяются по формуле  , где lОА – длина кривошипа ОА, и по ним строится график приведенного момента сил сопротивления (рис. 26, а). На основании этого графика с использованием графического интегрирования строятся графики работ приведенных сил сопротивления
, где lОА – длина кривошипа ОА, и по ним строится график приведенного момента сил сопротивления (рис. 26, а). На основании этого графика с использованием графического интегрирования строятся графики работ приведенных сил сопротивления  и сил движущих
и сил движущих  (рис. 26, б) и по ним – график приведенного момента сил движущих
(рис. 26, б) и по ним – график приведенного момента сил движущих  (рис. 26, а).
(рис. 26, а).
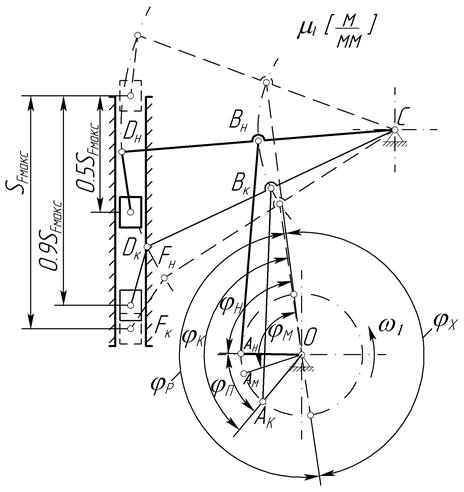
Рисунок 24 – Планы граничных положений механизма вытяжного пресса
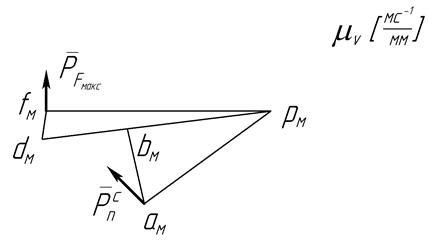
Рисунок 25 – Рычаг Жуковского для положения механизма при PF = PFмакс
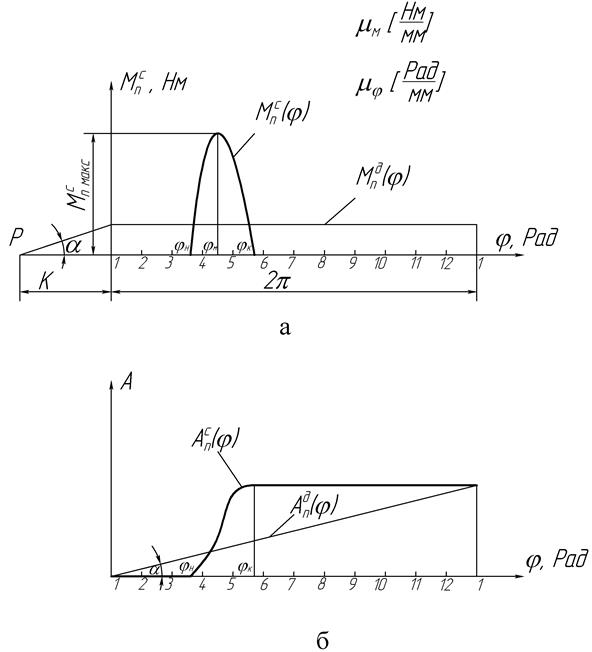
Рисунок 26 – График приведенных моментов (а) и работ (б) сил движущих
и сил сопротивления вытяжного пресса
В настоящем примере обработка заданной нагрузочной диаграммы выполнена без учета веса звеньев механизма. При учете веса звеньев последовательность обработки остается той же. При определении приведенного момента сил сопротивления на рычагах Жуковского для каждого положения механизма в сходственных точках, кроме силы , прикладываются силы веса звеньев. Поэтому графики моментов  и работ
и работ  будут несколько отличаться.
будут несколько отличаться.
Дата добавления: 2016-01-07; просмотров: 1524;