Обработка нагрузочной диаграммы поперечно-строгального станка
Рассмотрим обработку нагрузочной диаграммы поперечно-строгального станка, в котором процесс резания обрабатываемой детали осуществляется при движении резца, закрепленного на резцовой головке, относительно неподвижной детали, закрепленной на столе станка. Привод перемещения резцовой головки включает кривошипно-кулисный механизм, кинематическая схема которого показана на рис. 27. Положения механизма при резании и текущее показаны жирными линиями, крайние положения – пунктирными. Заданная нагрузочная диаграмма механизма приведена на рис. 28.

Рисунок 27 – Кинематическая схема механизма
поперечно-строгального станка

Рисунок 28 – Заданная нагрузочная диаграмма
поперечно-строгального станка
Механизм состоит из кривошипа 1, кулисного камня 2, кулисы 3, тяги 4 и резцовой головки 5, на которой закреплен резец. Заданными при обработке нагрузочной диаграммы являются размеры звеньев механизма, координаты опорных кинематических пар, связанных со стойкой (корпусом станка), и число оборотов кривошипного вала.
При разметке траекторий кинематических пар А, С и D на схеме механизма за его начальное (первое) положение принимается такое, при котором отрезок ВС1 кулисы лежит на касательной к окружности траектории движения кривошипа в точке А1 (см. рис. 27). Начало и конец резания (точки Dн и Dк) соответствуют пути резания Sp и повороту кривошипа ОА на угол jР. Полный ход резцовой головки SДмакс = Н соответствует крайним положениям кулисы ВС, при которой в точках А1 и А9 ось кулисы является касательной к окружности движения точки А.
Для построения расчетной нагрузочной диаграммы по положениям точек Dн и Dк обратным построением строят планы механизма для этих положений (рис.27) и определяют угол jp поворота кривошипа ОА при резании. В принятом масштабе на оси абсцисс откладывают угол jР и с учетом масштабных коэффициентов mР и mj строят расчетную нагрузочную диаграмму (рис. 29). Если, кроме силы резания, другие силы сопротивления не учитываются, то достаточно выполнить разбиение оси абсцисс на интервалы только на участке угла jp, так как в других положениях механизма приведенные моменты сил сопротивления будут равны нулю.
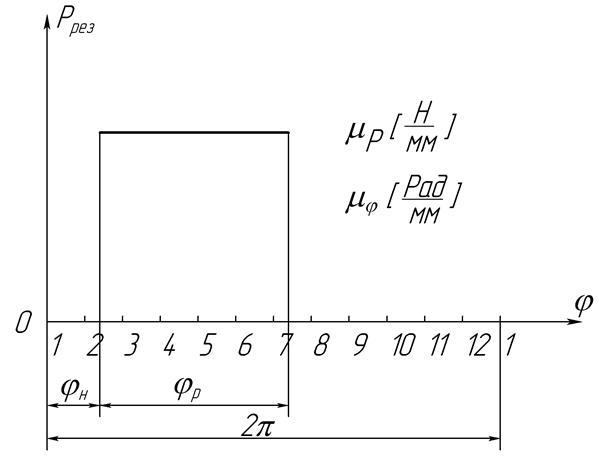
Рисунок 29 – Расчетная нагрузочная диаграмма
поперечно-строгального станка
Приведенный момент сил сопротивления  в каждом i-м положении механизма определяется из условий равенства мощностей этих сил и приведенных сил
в каждом i-м положении механизма определяется из условий равенства мощностей этих сил и приведенных сил  за цикл установившегося движения по формуле
за цикл установившегося движения по формуле
 , (60)
, (60)
где r = lOA – радиус кривошипа ОА [м];
 ,
,  – cкорости точек D и А в соответствующем положении механизма [м/с].
– cкорости точек D и А в соответствующем положении механизма [м/с].
Скорость VА = w r принимается постоянной из условия принятия постоянной угловой скорости кривошипа ОА. Скорости  определяются из рычагов Жуковского, один из которых показан на рис. 30. Приведенная сила
определяются из рычагов Жуковского, один из которых показан на рис. 30. Приведенная сила  , приложенная в точке А кривошипа определяется по силе резания Ррез с помощью рычага Жуковского. При необходимости учета других внешних сил – сил трения, веса звеньев и других сил вредного сопротивления эти силы прикладываются в сходственных точках на рычаге Жуковского и приведенный момент сил сопротивления определяется с учетом этих сил по формуле (60).
, приложенная в точке А кривошипа определяется по силе резания Ррез с помощью рычага Жуковского. При необходимости учета других внешних сил – сил трения, веса звеньев и других сил вредного сопротивления эти силы прикладываются в сходственных точках на рычаге Жуковского и приведенный момент сил сопротивления определяется с учетом этих сил по формуле (60).
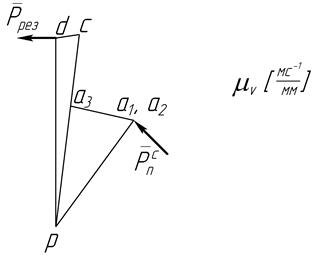
Рисунок 30 – Рычаг Жуковского для положения механизма поперечно-строгального станка при повороте кривошипа ОА на угол j
По данным, рассчитанным по формуле (60), строят графики приведенных моментов  (j),
(j),  (j) и работ
(j) и работ  (j),
(j),  (j) сил сопротивления и сил движущих (рис. 31).
(j) сил сопротивления и сил движущих (рис. 31).
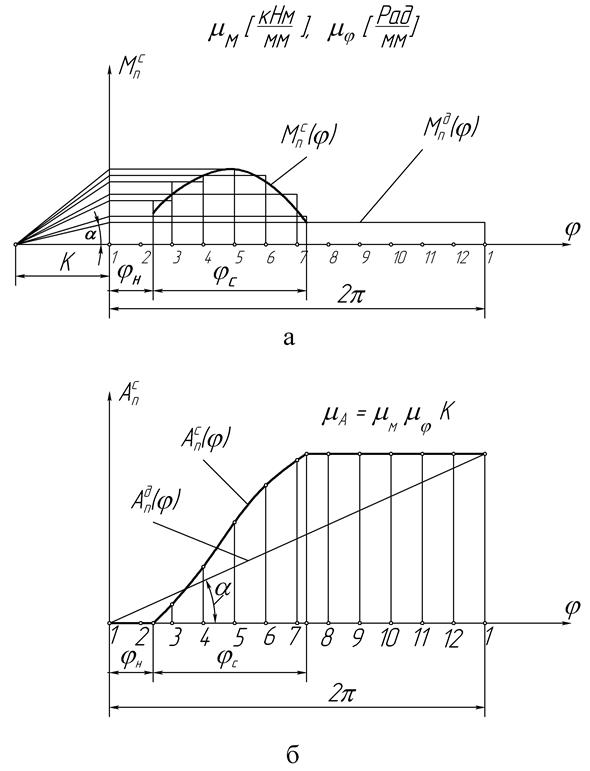
Рисунок 31 – Графики приведенных моментов (а) и работ (б) сил движущих
и сил сопротивления поперечно-строгального станка
Дата добавления: 2016-01-07; просмотров: 1693;