Обработка индикаторной диаграммы V-образного двухтактного двигателя внутреннего сгорания
В V-образном двухцилиндровом двухтактном двигателе оси цилиндров I и II (рис.10) расположены под углом b одна к другой и пересекаются с осью О коленчатого вала. При этом шатуны рычажного механизма двигателя передают усилия от поршней цилиндров на одно колено (кривошип). Заданными параметрами механизма являются радиус кривошипа r, длина шатунов lAB, lАС, число оборотов коленчатого вала n и соответственно его средняя угловая скорость w = const.
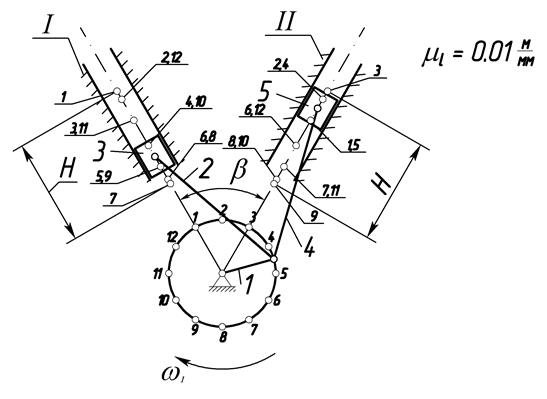
Рисунок 10 – Схема V-образного ДВС
В качестве исходных данных при построении схемы механизма и обработке индикаторной диаграммы приняты:
размеры звеньев механизма: r = lОА = 0,13 м; lAB = lАС = 0,43м; b = 60°.
максимальное давление в цилиндрах двигателя – 6,0 МПа;
диаметр цилиндров D = 0,1м.
За начальное (первое) положение механизма следует принимать такое, при котором поршень цилиндра I занимает крайнее верхнее положение и ось шатуна расположена на оси цилиндра. Исходя из деления окружности движения точки А кривошипа за цикл установившегося движения (за 1 оборот) на 12 равных интервалов, в положении 1 кривошипа поршень цилиндра II будет занимать положение 11. Разметка положений поршней приведена на схеме механизма.
Индикаторные диаграммы для обоих цилиндров V-образного ДВС (рис. 11) одинаковы. Аналогично обработке индикаторной диаграммы четырехтактного ДВС выполняется согласование масштабов индикаторной диаграммы и плана механизма и на диаграмме наносят точки, соответствующие положениям механизма. Положения поршня цилиндра II на индикаторной диаграмме показаны через запятую.
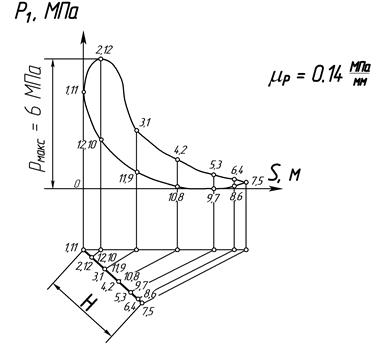
Рисунок 11 – Индикаторная диаграмма V-образного двигателя
В стандартных единицах определяются движущие силы, действующие на поршни каждого из цилиндров РI и РII, из выражений:
Для цилиндра I
 ;
;
Для цилиндра II
 ,
,
где:  - масштабный коэффициент давления газа по оси ординат индикаторной диаграммы, [МПа/мм];
- масштабный коэффициент давления газа по оси ординат индикаторной диаграммы, [МПа/мм];
 ,
,  – ординаты индикаторной диаграммы в мм (рис. 11), соответствующие давлению газа в цилиндрах в зависимости от положения кривошипа;
– ординаты индикаторной диаграммы в мм (рис. 11), соответствующие давлению газа в цилиндрах в зависимости от положения кривошипа;
F – площадь поршней цилиндров, м2.
По величине движущих сил строится расчетная нагрузочная диаграмма (рис. 12), на которой изображаются графики нагружения  и
и  поршней цилиндров I и II за цикл установившегося движения.
поршней цилиндров I и II за цикл установившегося движения.
Для каждого положения механизма строятся рычаги Жуковского с нанесением на них в сходственных точках заданных сил  и
и  и сил веса звеньев
и сил веса звеньев  ,
,  ,
,  ,
,  без поворота сил и определяется значение приведенного момента
без поворота сил и определяется значение приведенного момента  движущих сил. Приведенный момент определяется из выражения
движущих сил. Приведенный момент определяется из выражения
 , (54)
, (54)
где  ,
,  ,
,  - скорости точек А, В, С механизма (рис. 10), определяемые из рычагов Жуковского.
- скорости точек А, В, С механизма (рис. 10), определяемые из рычагов Жуковского.
На рис. 13 показаны рычаги Жуковского для 4, 8, и 11 характерных положений механизма. В рассматриваемом механизме силы веса звеньев по сравнению с силами и значительно меньше, поэтому силами веса можно пренебречь и приведенный момент движущих сил определять по формуле (54) только по величине сил и с учетом их знаков. По полученным данным строятся графики приведенных моментов сил движущих (φ) и сил сопротивления  (φ) (рис. 14, а).
(φ) (рис. 14, а).
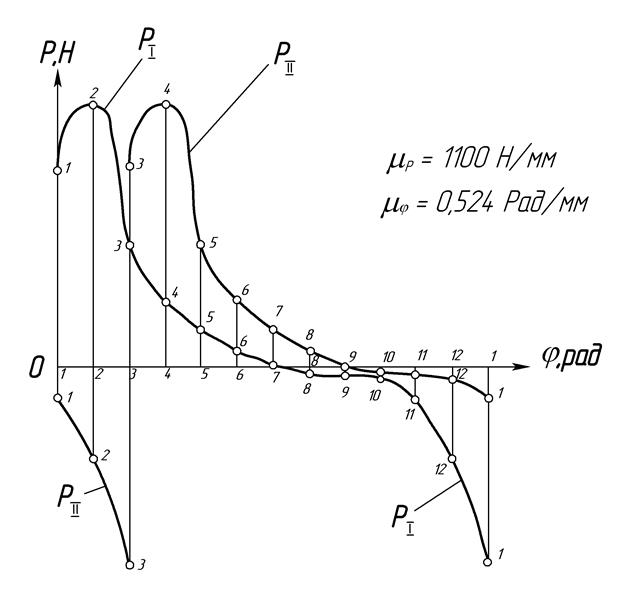
Рисунок 12 – Расчетная нагрузочная диаграмма V-образного ДВС
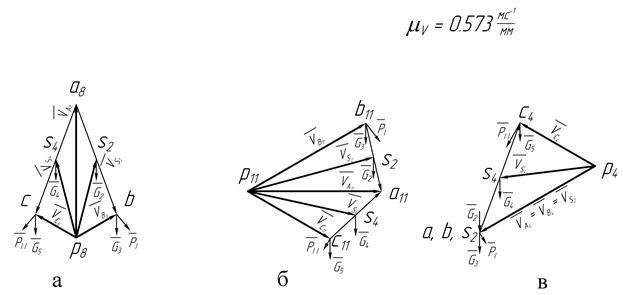
Рисунок 13 – Рычаги Жуковского для 8 (а), 11 (б) и 4 (в)
положений механизма V-образного ДВС
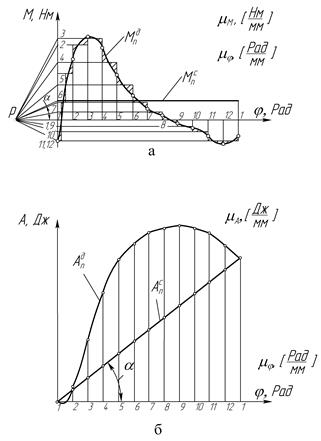
Рисунок 14 – Графики приведенных моментов сил движущих  , сил сопротивления
, сил сопротивления  (а) и работ этих сил
(а) и работ этих сил  ,
,  V-образного ДВС
V-образного ДВС
Знаки моментов (φ) определяются направлением векторов сил и скоростей поршней цилиндров I и II. Из рис. 13 следует, что, например, в 4-м положении (рис. 13, в) механизма положительные значения моментов от сил и относительно полюса р4 повернутого плана скоростей (рычага Жуковского) соответствует их направлению против часовой стрелки. В этом положении силы и действуют по направлению векторов скорости  и
и  поршней и являются положительными, соответственно положительными являются и моменты этих сил. Взаимно-перпендикулярные направления векторов сил , и скоростей ,
поршней и являются положительными, соответственно положительными являются и моменты этих сил. Взаимно-перпендикулярные направления векторов сил , и скоростей ,  (рис. 13, в) обусловлены поворотом векторов , на 90º при построении рычага Жуковского. В 11-м положении (рис.13, б) силы и действуют против направления скорости поршней, момент направлен по часовой стрелке и является отрицательным. В положении 8 (рис.13, а) сила положительна, сила – отрицательна, так как скорость
(рис. 13, в) обусловлены поворотом векторов , на 90º при построении рычага Жуковского. В 11-м положении (рис.13, б) силы и действуют против направления скорости поршней, момент направлен по часовой стрелке и является отрицательным. В положении 8 (рис.13, а) сила положительна, сила – отрицательна, так как скорость  поршня цилиндра II совпадает по направлению с вектором силы , скорость
поршня цилиндра II совпадает по направлению с вектором силы , скорость  поршня цилиндра I направлена противоположно вектору силы . Сила больше силы , плечи сил hI и hII одинаковы и соответственно суммарный приведенный момент
поршня цилиндра I направлена противоположно вектору силы . Сила больше силы , плечи сил hI и hII одинаковы и соответственно суммарный приведенный момент  от этих сил в положении 8 будет положительным. Анализируя направления векторов скоростей поршней
от этих сил в положении 8 будет положительным. Анализируя направления векторов скоростей поршней  и
и  и сил и , следует помнить, что на рис. 13 векторы скоростей и сил расположены взаимно перпендикулярно, так как в соответствии с методом Жуковского планы скоростей повернуты на 90°. В действительности эти векторы направлены по одной линии.
и сил и , следует помнить, что на рис. 13 векторы скоростей и сил расположены взаимно перпендикулярно, так как в соответствии с методом Жуковского планы скоростей повернуты на 90°. В действительности эти векторы направлены по одной линии.
Под графиком (φ) (рис. 14, а) строят графики работ  (φ) и
(φ) и  (φ) приведенных моментов сил движущих и сил сопротивления (рис. 14, б). Из условия равенства этих работ на рис. 14, а проводят прямую параллельную оси абсцисс графика (φ) приведенного момента сил сопротивления.
(φ) приведенных моментов сил движущих и сил сопротивления (рис. 14, б). Из условия равенства этих работ на рис. 14, а проводят прямую параллельную оси абсцисс графика (φ) приведенного момента сил сопротивления.
Дата добавления: 2016-01-07; просмотров: 1787;