ВВЕДЕНИЕ. ОСНОВНЫЕ ПОНЯТИЯ ТЕОРИИ МЕХАНИЗМОВ И МАШИН
Теория механизмов и машин — научная основа создания новых механизмов и машин. Ведущей отраслью современной техники является машиностроение. По уровню развития машиностроения судят о развитии производительных сил в целом. Прогресс машиностроения в свою очередь определяется созданием новых высокопроизводительных и надежных машин. Решение этой важнейшей проблемы основывается на комплексном использовании результатов многих научных дисциплин и в первую очередь теории механизмов и машин, под которой понимается наука об общих методах исследования свойств механизмов и машин и проектирования их схем.
Наиболее развита к настоящему времени та ее часть, которая называется теорией механизмов. Механизм можно кратко определить как устройство для преобразования механического движения твердых тел. В теории механизмов изучаются такие методы исследования свойств механизмов и проектирования их схем, которые являются общими Для всех (или для определенных групп) механизмов независимо от конкретного назначения машины, прибора или аппарата. Например, один и тот же механизм для преобразования вращательного движения, выполненный в виде зубчатых колес, может применяться в автомобиле, в часах и станках. В теории машин рассматриваются методы проектирования схем машин, которые являются общими для машин различных областей техники. Обе части теории механизмов и машин неразрывно связаны между собой, так как механизмы составляют основу почти любой машины.
Качество создаваемых машин и механизмов в значительной мере определяется полнотой разработки и использования методов теории механизмов и машин. Чем более полно будут учтены при построении механизмов и машин критерии производительности, надежности, точности и экономичности, тем совершеннее будут получаемые конструкции.
Примеры механизмов современной техники. Механизмы применялись уже в глубокой древности. Достаточно указать на ловушки для зверей в каменном веке. Ко времени Леонардо да Винчи (1452— 1519) уже были известны почти все основные типы механизмов. Дальнейшее развитие техники происходило преимущественно не путем создания новых схем механизмов, а путем придания им новых качеств. Отметим три примера механизмов современной техники.
1. Механизмы манипуляторов, т. е. устройств, воспроизводящих движения рук человека. В атомной технике они позволяют выполнять различные манипуляции с радиоактивными материалами, причем оператор, управляющий движением манипулятора, находится в безопасной зоне. Автоматически управляемые манипуляторы применяются также для подводных работ на большой глубине и для работ в космосе. В последние годы по типу манипуляторов стали создаваться промышленные роботы, заменяющие человека при работе во вредных условиях, при выполнении утомляющих операций на быстродействующих конвейерах и т. п. Роботы отличаются от обычных машин-автоматов и автоматических вспомогательных устройств (загрузочных, контрольных, упаковочных и т. п.) тем, что их можно быстро переналаживать на выполнение различных операций. Рабочие органы манипуляторов и роботов совершают, как правило, сложные пространственные движения. В некоторых случаях рабочие органы должны «ощущать» соприкосновение с перемещаемым или обрабатываемым предметом, что достигается соответствующим построением системы управления.
2. Самонастраивающиеся механизмы, в которых законы движения рабочих органов автоматически изменяются при изменении рабочего процесса так, что условия его выполнения оказываются оптимальными. В простейшем случае эти требования удовлетворяются, если при изменении рабочего процесса соответственно изменяется скорость движения рабочего органа. Тогда можно воспользоваться известным механизмом бесступенчатого изменения скорости, построив систему связи между механизмом и рабочим процессом так, чтобы каждому возможному состоянию рабочего процесса соответствовало оптимальное значение скорости рабочего органа механизма. В более сложных случаях, для того чтобы рабочий процесс протекал в наилучших условиях, надо изменять не только скорость, но и весь закон движения рабочего органа, включая и траектории движения отдельных точек. В самонастраивающихся механизмах эти требования удовлетворяются путем автоматического изменения одного или нескольких размеров, определяющих схему механизма.
3. Механизмы медицинских аппаратов, заменяющих физиологические функции органов человека. Такие аппараты, как искусственные легкие, массажер сердца, применяющийся при «оживлении» человека, аппарат искусственного кровообращения и многие другие, насыщены различными механизмами, главной особенностью которых является возможность регулирования движения рабочего органа «на ходу», т. е. без остановки его движения. Разнообразны также механизмы современных Протезов. Механические руки, послужившие образцом для создания манипуляторов, могут приводиться в движение от биотоков (биопротезы) ж ощущать силу зажатия взятого Предмета. Протезы для ног представляют теперь механизмы, которые приводятся вдвижение миниатюрными электродвигателями и полностью имитируют движение ноги при ходьбе.
Основные проблемы теории механизмов и машин.Задачи теории механизмов и машин очень разнообразны, но важнейшие из них можно
сгруппировать по трем разделам (проблемам): анализ механизмов, синтез механизмов и теория машин-автоматов.
Анализ механизма состоит в исследовании кинематических и динамических свойств механизма по заданной его схеме, а синтез механизма — в проектировании схемы механизма по заданным его свойствам. Следовательно, всякая задача синтеза механизма является обратной по отношению к задаче анализа. Разделение теории механизмов на анализ и синтез носит условный характер, так как выбор схемы механизма и определение ее параметров часто выполняются путем сравнительного анализа различных механизмов для воспроизведения одних и тех же движений. Этот сравнительный анализ возможных вариантов механизма составляет теперь основу методов синтеза механизмов с использованием электронных вычислительных машин (ЭВМ). Кроме того, в процессе синтеза механизма приходится выполнять поверочные расчеты, используя методы анализа. Тем не менее методически удобно различать задачи анализа и синтеза механизмов, так как это разделение позволяет объединять задачи теории механизмов в однородные группы по признаку общности методов.
Иногда теорию механизмов подразделяют на кинематику механизмов и динамику механизмов по аналогии с делением курса теоретической механики. С развитием методов синтеза механизмов это деление утрачивает свое значение, так как для многих механизмов проектирование их схем выполняется с одновременным учетом как кинематических, так и динамических условий.
Появление теории механизмов как науки, имеющей характерные для нее методы исследования и проектирования механизмов, относится ко второй половине восемнадцатого столетия. Сперва развивались методы анализа механизмов, как более простые. Лишь с середины девятнадцатого столетия стали развиваться также методы синтеза механизмов. Особенно плодотворным оказался общий метод аналитического синтеза механизмов, предложенный П. Л. Чебышевым. Постановка задачи синтеза по Чебышеву в сочетании с возможностями, которые представляют современные ЭВМ, обеспечивают практически решение любой задачи синтеза механизмов по заданным кинематическим свойствам. Значительно сложнее решать задачи синтеза механизмов по заданным динамическим свойствам. Необходимость их учета вызывается непрерывным ростом нагруженности и быстроходности механизмов, а также общим повышением требований к качеству выполнения рабочего процесса. Учет динамических свойств потребовал рассмотрения влияния на движение механизма упругости его частей, переменности их масс, зазоров в подвижных соединениях и т. п. В связи с появлением механизмов, в которых для преобразования движения используются жидкости и газы, динамика механизмов стала основываться не только на законах механики твердого тела, но и на законах течения жидкости и газов. Неудивительно поэтому, что, несмотря на большое
число публикуемых работ по динамике механизмов, проблема синтеза механизмов по их динамическим свойствам еще далека от завершения.
Развитие теории машин-автоматов связано главным образом с совершенствованием методов построения схемы системы управления, определяющей согласованность движения исполнительных органов. Особую ценность имеет создание методов построения самонастраивающихся схем управления, в которых программа управления автоматически корректируется с изменением рабочего процесса. К теории машин-автоматов относится также разработка методов проектирования промышленных роботов, которые начинают применяться во многих отраслях техники.
По всем трем указанным разделам теории механизмов и машин ведется интенсивная работа во многих странах мира. Для организации и проведения международных совещаний и конгрессов, а также для обмена опытом и проведения совместных работ (в первую очередь по терминологии, стандартизации, теории манипуляторов и по проблемам высшего образования) в 1969 г. создана Международная организация по теории механизмов и машин (ИФТОММ) Ч
Значение курса теории механизмов и машин для инженерного образования.Большинство специальностей, по которым проводится подготовка инженеров в машиностроительных и механико-технологических высших учебных заведениях, можно подразделить на две группы: к первой группе отнесем конструкторские специальности, ко второй группе — технологические и эксплуатационные специальности.
Значение курса теории механизмов и машин для подготовки инженеров-конструкторов, проектирующих новые механизмы и машины, очевидно, так как общие методы синтеза механизмов, излагаемые в этом курсе, дают возможность не только находить параметры механизмов по заданным кинематическим и динамическим свойствам, но и определять их оптимальные сочетания с учетом многих дополнительных условий.
Несколько иное значение имеет курс теории механизмов и машин для технологических и эксплуатационных специальностей. Инженеры-механики по технологии изготовления и эксплуатации машин сравнительно редко участвуют непосредственно в проектировании машин. Тем не менее они должны хорошо знать основные виды механизмов и их кинематические и динамические свойства. Эти знания необходимы для ясного понимания принципов работы отдельных механизмов и их взаимодействия в машине. В процессе эксплуатации любой машины всегда возможно возникновение неполадок и отказов в работе из-за неисправностей, связанных с нарушением режима движения частей машины. Устранить эти неисправности, а в некоторых случаях дать задание на проектирование нового механизма может только инженер, хорошо знающий кинематические и динамические свойства различных механизмов. Поэтому теория механизмов и машин входит в общетехнический цикл дисциплин не только машиностроительных, но и многих
других инженерных специальностей, связанных с применением механизмов и машин.
Машина. По мере развития машин содержание термина «машина» изменялось. Для современных машин дадим следующее определение: машина есть устройство, выполняющее механические движения для преобразования энергии, материалов и информации с целью замены или облегчения физического и умственного труда человека. В этом определении под материалами понимаются обрабатываемые предметы, перемещаемые грузы и другие объекты труда. В зависимости от основного назначения (какой вид преобразования преобладает) различают энергетические, технологические, транспортные и информационные машины.
Энергетические машины предназначены для преобразования любого вида энергии в механическую (и наоборот). К ним принадлежат, например, электродвигатели, турбины, двигатели внутреннего сгорания, паровые машины, электрогенераторы.
Машины для преобразования материалов подразделяются на технологические и транспортные. В технологических машинах под материалом подразумевается обрабатываемый предмет, который может быть в твердом, жидком и газообразном виде. Преобразование материала в этих машинах состоит в изменении его размеров, формы, свойств или состояния. Примеры технологических машин: металлообрабатывающие станки, прокатные станы, ткацкие станки, упаковочные машины. В транспортных машинах под материалом понимается перемещаемый предмет. Примеры транспортных машин: автомобили, тепловозы, самолеты, вертолеты, подъемники, краны, транспортеры. В тех случаях, когда транспортная машина предназначена для перемещения людей, под материалом, конечно, понимается кабина лифта, вагон, шасси автомобиля и т. п.
Машины, предназначенные для получения и преобразования информации, называются информационными. Если информация представлена в виде чисел, то информационная машина называется счетной Или вычислительной. Примеры счетных машин: арифмометры, механические интеграторы, бухгалтерские машины. Электронная вычислительная машина, строго говоря, не является машиной, так как в ней механические движения служат лишь для выполнения вспомогательных операций. Название машины сохранено за ней в порядке исторической преемственности от счетных машин типа арифмометра.
Итак, основным признаком, отличающим машину от других устройств, является выполнение механических движений х — отсюда и происходит термин «машина» (от греч. p,ri%avri, лат. machine). Однако из всех устройств, имеющих движущиеся части, только те могут быть названы машинами, в которых механические движения предназначены для преобразования энергии, материалов и информации.
Машина, в которой все преобразования энергии, материалов и информации выполняются без непосредственного участия человека, называется машиной-автоматом. Применение машин-автоматов, однако, предполагает присутствие человека (оператора), наблюдающего за их работой и изменяющего в необходимых случаях программу действия. Совокупность машин-автоматов, соединенных между собой автоматическими транспортными устройствами и предназначенных .для выполнения определенного технологического процесса, образует автоматическую линию. Машина, особенно машина-автомат, при правильном ее использовании облегчает труд человека, увеличивает производительность труда и обеспечивает высокое качество выполнения рабочего процесса.
Механизм.Определение термина «механизм» неоднократно менялось по мере того, как появлялись новые механизмы. Еще сравнительно недавно считали, что механизм может состоять только из твердых тел. Современное определение этого термина предусматривает уже, что в преобразовании движения могут участвовать также жидкости и газы. Механизм есть система тел, предназначенная для преобразования движения одного или нескольких твердых тел в требуемые движения других твердых тел. Если в преобразовании движения кроме твердых тел участвуют жидкие или газообразные тела, то механизм называется соответственно гидравлическим или пневматическим.
Основным признаком механизма является преобразование механического движения. Отсюда следует, что нельзя называть механизмом устройство, в котором нет этого преобразования. Например, ротор электродвигателя и подшипники, в которых он вращается, не образуют механизма, так как в этом случае электрическая энергия непосредственно преобразуется в требуемое движение без какого-либо промежуточного преобразования механического движения. Механизм в электродвигателе появляется только тогда, когда требуется уменьшить угловую скорость выходного вала по сравнению с угловой скоростью ротора (электродвигатель с встроенным редуктором).
Механизмы входят в состав многих машин, так как выполнение механических движений для преобразования энергии, материалов и информации требует обычно преобразования движения, получаемого от двигателя. Однако нельзя отождествлять понятия «машина» и «механизм». Во-первых, кроме механизмов в машине всегда имеются дополнительные устройства, связанные с управлением механизмами (пуск в ход, блокировка, контроль и т. п.). Особенно развиты эти устройства в машинах-автоматах, где они образуют систему автоматического управления и выполняются обычно на электромагнитных или пневматических элементах. Во-вторых, есть машины, в которых нет механизмов. Например, в последние годы появились технологические машины, в которых каждый исполнительный орган приводится в движение от индивидуального электро- или гидродвигателя.
Несмотря на указанную тенденцию к сокращению числа механизмов в машине, все же они составляют важнейшую, хотя и не единственную, часть большинства машин. Кроме того, механизмы применяются в приборах, аппаратах и других технических устройствах.
Звено механизма.Механизм состоит из многих деталей, т. е. отдельно изготовляемых частей. Например, колесо автомобиля состоит из
нескольких деталей: обода, втулки, крышки, нескольких болтов, гаек и т. п. Но вся эта совокупность деталей соединена между собой так, что их взаимное расположение не меняется при движении автомобиля. Поэтому, изучая движение механизма, в состав которого входит колесо автомобиля, мы можем рассматривать совокупность деталей, образующих колесо, как одно твердое тело. Одним твердым телом в механизме считается также любая совокупность деталей, не имеющих между собой относительного движения (например, детали, лежащие на ленте конвейера). Твердое тело, входящее в состав механизма, называется звеном механизма. Под твердыми телами в теории механизмов и машин понимают как абсолютно твердые, так и деформируемые и гибкие тела.
Входные и выходные звенья механизма. В каждом механизме имеется стойка, т. е. неподвижное звено или звено, принимаемое за неподвижное (если механизм установлен на движущемся основании). Из подвижных звеньев выделяют входные и выходные звенья. Входным звеном (сокращенно — входом) называется звено, которому сообщается движение, преобразуемое механизмом в требуемые движения других звеньев. Выходным звеном (сокращенно — выходом) называется звено, совершающее движение, для выполнения которого предназначен механизм. Остальные подвижные звенья называются соединительными или промежуточными.
Обычно в механизме имеется один вход и один выход. Вход получает движение от двигателя, а выход соединяется с рабочим органом машины или указателем прибора. Но могут быть механизмы с несколькими входами и выходами. Например, в механизме для сложения чисел имеется два входа, перемещения которых пропорциональны слагаемым, и один выход, перемещение которого пропорционально искомой сумме. В автомобильном дифференциале, наоборот, имеется один вход, получающий движение от двигателя, и два выхода, соединенных с задними колесами.
Кинематическая пара. Звенья соединяются между собой подвижно. В общем случае звено может образовывать подвижные соединения с несколькими звеньями, но для удобства изучения кинематических свойств этих соединений принято рассматривать соединения двух соприкасающихся звеньев. Подвижное соединение двух соприкасающихся звеньев называется кинематической парой. Кинематическую пару можно определить также как соединение двух соприкасающихся звеньев, допускающее их относительное движение. В этом определении подчеркивается, что подвижность соединения звеньев состоит в возможности их относительного движения.
Классификация кинематических пар по числу степеней свободы и числу связей. Числом степеней свободы механической системы называется число независимых возможных перемещений системы. Для твердого тела, свободно движущегося в пространстве, число степеней свободы равно шести: три возможных перемещения вдоль неподвижных координатных осей и три — вокруг этих осей. Для звеньев, входящих в кинематическую пару, число степеней свободы в их относительном движении всегда меньше шести, так как условия постоянного сопри-
касания звеньев кинематической пары уменьшают число возможных перемещений. По предложению В. В. Добровольского J все кинематические пары подразделены по числу степеней свободы на одно-, двух-, трех-, четырех- и пятиподвижные.
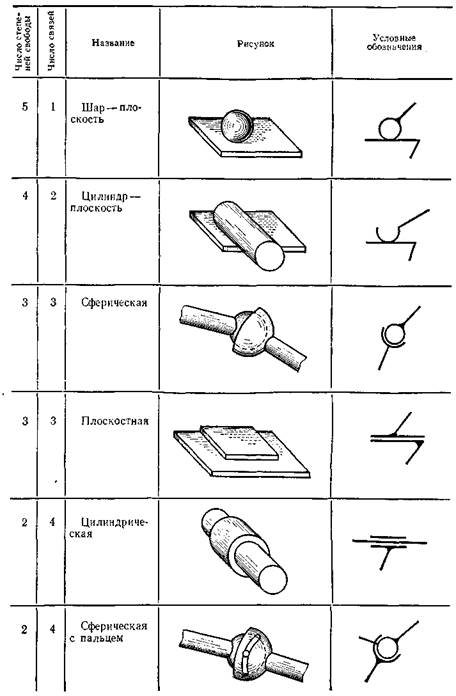
В табл. 1 показаны наиболее распространенные кинематические пары с их условными обозначениями по ГОСТ 2770—68, которые дополнены обозначениями, рекомендованными Международной организацией по стандартам (ИСО)2.
Кроме числа степеней свободы в относительном движении звеньев в таблице указано также число связей, т. е. число ограничений, наложенных на относительное движение звеньев. Сумма числа связей и числа степеней свободы всегда равна 6, т. е. равна числу степеней свободы твердого тела. Например, для пятиподвижной кинематической пары
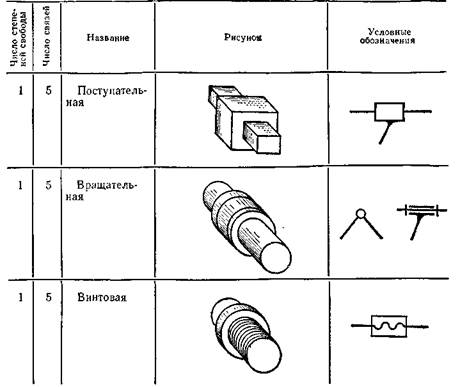
«шар — плоскость» число связей равно 1 (одно ограничение — невозможность относительного перемещения по нормали к плоскости). Следовательно, суммируя число степеней свободы и число связей, получаем 5+1=6. На этом основании пятиподвижную кинематическую пару можно назвать также парой с одной связью или парой первого класса, если считать, что номер класса пары совпадает с числом связей. Аналогично, четырехподвижная пара «цилиндр — плоскость» имеет 4 степени свободы и 2 связи, т. е. она относится к парам второго класса. Трехподвижные кинематические пары (пары третьего класса) представлены в двух вариантах: сферическая пара (шаровой шарнир) и плоскостная пара. Двухподвижные кинематические пары (пары четвертого класса) также представлены в двух вариантах: цилиндрическая пара и сферическая пара с пальцем, который перемещается в кольцевом пазу. Возможным перемещениям здесь соответствуют поворот вокруг оси пальца и поворот относительно оси, перпендикулярной плоскости кольцевого паза и проходящей через центр сферы. Наконец, одноподвижные кинематические пары (пары пятого класса) представлены в трех вариантах. В поступательной паре относительное движение ее звеньев прямолинейно-поступательное, во вращательной паре — вращательное и в винтовой паре — винтовое, т. е. движение, при котором перемещения вдоль и вокруг какой-либо оси связаны между собой определенной зависимостью.
Низшие и высшие пары.Совокупность поверхностей, линий и си-дельных точек звена, по которым оно может соприкасаться с другим звеном, образуя кинематическую пару, называется элементом кинематической пары. Из определения следует, что кинематическую пару можно рассматривать как совокупность двух элементов, каждый из которых принадлежит одному звену. Для уменьшения износа элементов кинематической пары желательно, чтобы они соприкасались по поверхности. Кинематическая пара, в которой требуемое относительное движение звеньев может быть получено постоянным соприкосновением ее элементов по поверхности, называется низшей парой. К низшим парам принадлежат: вращательная, поступательная, винтовая, цилиндрическая, сферическая и плоскостная (см. табл. 1). Если требуемое относительное движение звеньев не может быть воспроизведено ни одной из указанных шести низших пар, то применяют высшие пары. Высшей парой называется кинематическая пара, в которой требуемое относительное движение звеньев может быть получено только соприкасанием ее элементов по линиям и в точках.
Следует обратить внимание на то, что элементами низшей пары могут быть линии и точки. Например, в некоторых приборах элементы вращательной пары соприкасаются по отдельным линиям и тем не менее ее нельзя считать высшей парой, так как то же самое относительное движение звеньев (вращательное) может быть получено соприкаса» нием элементов по поверхности. В высших парах соприкасание элементов всегда происходит только по линиям и точкам.
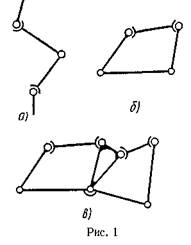
Кинематические цепи. Кинематической цепью называется система звеньев, образующих между собой кинематические пары. Все кинематические цепи подразделяются на плоские и пространственные. В плоской кинематической цепи при закреплении одного из звеньев все другие совершают плоское движение, параллельное одной и той же неподвижной плоскости. На рис. 1 с применением условных обозначений по табл. 1 показаны кинематические цепи, в которых плоское движение получается при параллельности осей всех вращательных пар. Кинематическая цепь, звенья которой не образуют замкнутых контуров, называется незамкнутой (рис. 1, а). Кинематическая цепь, звенья которой образуют один (рис. 1, б) или несколько (рис. 1, в) замкнутых контуров, называется замкнутой.
Кинематическая цепь входит в состав каждого механизма, составленного только из твердых тел. Однако нельзя утверждать, что механизм всегда образуется из кинематической цепи, так как есть механизмы (например, гидравлические), в которых кинематических цепей может и не быть.
Кинематические соединения.Кинематическую пару можно рассматривать как двухзвенную незамкнутую кинематическую цепь, предназначенную для воспроизведения требуемого относительного движения звеньев. Иногда для воспроизведения этого движения конструктивно более удобная (например, более компактная) кинематическая цепь получается при числе звеньев более двух. Кинематическая цепь, конструктивно заменяющая в механизме кинематическую пару, называется кинематическим соединением. В табл. 2 даны три примера кинематических соединений с указанием, каким кинематическим парам они эквивалентны. Шарикоподшипник представлен как пример кинематического соединения, которое по сравнению с эквивалентной вращательной парой дает уменьшение трения. Аналогично выполняются роликовые направляющие, заменяющие поступательную пару, и винтовые пары с промежуточными шариками. Карданный шарнир представляет собой последовательное соединение двух вращательных пар, оси которых пересекаются. Это соединение проще в изготовлении и надежнее, чем сферическая пара с пальцем. Последовательное соединение трех вращательных пар с пересекающимися осями заменяет сферическую пару.
Дата добавления: 2015-12-29; просмотров: 7421;