Лекция 3. ОСНОВНЫЕ ВИДЫ МЕХАНИЗМОВ
Плоские механизмы с низшими парами. Все механизмы, составленные только из твердых тел, разделяются на две большие группы: механизмы с низшими парами, которые иногда называют стержневыми или рычажными, и механизмы с высшими парами. Из механизмов с низшими парами наибольшее распространение имеет рассмотренный ранее механизм шарнирного четырехзвеннпка (см. рис. 2). В этом механизме четыре звена: стойка 0, вращающиеся звенья 1 и 3 и звено 2, которое образует кинематические пары только с подвижными звеньями и называется шатуном. Вращающееся звено, совершающее полный оборот вокруг неподвижной оси, называется кривошипом, а звено, совершающее качательное движение,— коромыслом.
В зависимости от наличия или отсутствия кривошипа шарнирный четырехзвенник может быть трех видов: 1) кривошипно-коромысловый, 2) двухкривошипный, 3) двухкоромысловый. Условия существования кривошипа в шарнирном четырехзвеннике впервые были сформулированы Грасгофом в следующем виде: «Шарнирная четырехзвенная цепь может только тогда образовывать кривошипно-коромысловый или двухкривошипный механизм, когда сумма длин наибольшего и наименьшего звеньев меньше суммы длин двух других звеньев. При закреплении наименьшего звена механизм будет двухкривошипным, а при закреплении одного из соседних с ним звеньев — кривошипно-коромысловый (причем наименьшее звено будет кривошипом); во всех иных случаях из цепи получаются двухкоромысловые механизмы».
Для доказательства этих условий рассмотрим кривошипно-коромысловый механизм в трех особых положениях (рис. 7). В первом по-
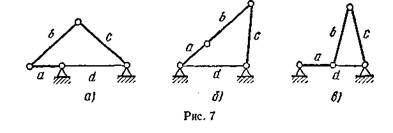
ложении (рис. 7, а) из условия, что в треугольнике длина каждой стороны меньше суммы длин двух других сторон, имеем

Аналогично, для второго положения (рис. 7, б)

Для третьего положения (рис. 7, в)

Складывая неравенства (3.1) и (3.2), получаем

Складывая неравенства (3.1) и (3.3), получаем

Складывая неравенства (3.2) и (3.3), получаем
2a+b+c<2d+b+c, т. е. a<d.
Следовательно, кривошип а есть наименьшее звено. Кроме того, все необходимые неравенства (3.1), (3.2) и (3.3) удовлетворяются, если сумма длин наименьшего а и наибольшего Ь, или с, или d звеньев меньше суммы длин двух других звеньев.
В кривошипно-коромысловом механизме углы между стойкой и кривошипом, а также между шатуном и кривошипом изменяются от

О до 360°. Следовательно, если в кривошипно-коромысловом механизме сделать стойкой звено а, то получится двухкривошипный механизм с кривошипами b и d. Во всех остальных случаях кривошипа нет, т. е. механизм будет двухкоромысловым. Заменяя в шарнирном четырех-звеннике одну или две вращательные пары на поступательные, получаем механизмы, показанные в табл. 5. Из четырехзвенной кинематической цепи с одной поступательной парой можно получить механизмы двух типов. Если стойкой сделать звено, входящее в поступательную пару, то в механизме будет ползун, т. е. звено, которое входит только в низшие пары и совершает прямолинейно-поступательное движение, а вращающееся звено в зависимости от соотношений между длинами звеньев будет или кривошипом, или коромыслом. Соответственно механизм будет называться или кривошипно-ползунным, или
коромыслово-ползунным. Если стойкой сделать звено, входящее в две вращательные пары, то в механизме будет кулиса, т. е. звено, вращающееся вокруг неподвижной оси и образующее с другим подвижным звеном поступательную пару. Соответственно механизм называется кулисным.
Из четырехзвенной кинематической цепи с двумя смежными поступательными парами можно получить механизмы трех типов: механизм эллипсографа, в котором траектории точек шатуна — эллипсы (окружность и прямая линия считаются частными случаями эллипса), двухкулисный механизм и синусный механизм, в котором ползун перемещается пропорционально синусу угла поворота кривошипа, если угол между осями поступательных пар равен 90°.
Из четырехзвенной кинематической цепи с двумя несмежными поступательными парами получается только один тип механизма — тан-генсный механизм, названный так потому, что перемещение ползуна пропорционально тангенсу угла поворота кулисы.
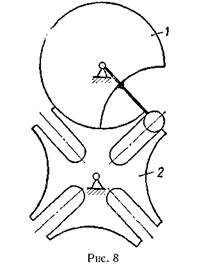
Конструктивное оформление рассмотренных механизмов очень разнообразно. К одной из разновидностей кулисного механизма относится мальтийский механизм (рис. 8), предназначенный для преобразования непрерывного вращения звена 1 в движение звена 2 с периодическими остановками, во время которых звено 2 предохраняется от самопроизвольного поворота соприкасанием цилиндрических поверхностей на звеньях 1 и 2. Число остановок равно числу пазов на звене 2, в которые последовательно входит ролик (цевка) звена /. Во время движения звена 2 механизм по структуре и по кинематическим свойствам тождествен кулисному механизму. Число пазов в мальтийских механизмах обычно лежит в пределах от 4 до 20. Свое название механизм получил от сходства его с крестом мальтийского ордена при числе пазов, равном 4.
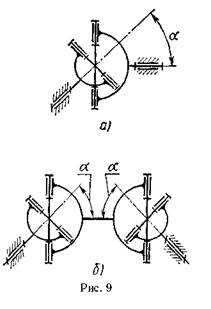
Пространственные механизмы с низшими парами.Если в механизме, звенья которого образуют только вращательные пары, оси всех пар пересекаются в одной точке, то траектории точек звеньев лежат на концентрических сферах и механизм называется сферическим. Структурные свойства этих механизмов во многом аналогичны свойствам плоских механизмов. На рис. 9, а показана схема четырехзвенного сферического механизма для частного случая, когда оси вращательных пар трех подвижных звеньев пересекаются под углом 90°, а оси, принадлежащие стойке, пересекаются под произвольным углом а. Этот механизм, известный под названием механизма Кардана г (иногда называется также механизмом шарнира Гука), служит для передачи вращения между валами, оси которых пересекаются. При равномерном вращении одного вала другой вал вращается неравномерно. Этот недостаток устранен в двойном механизме Кардана (рис. 9, б). Кроме того, двойной механизм Кардана допускает не только изменение угла между осями валов, но и смещение их по высоте, как это имеет место, например, в автомобиле при передаче вращения к задним колесам (передача через карданный вал). Предложено также много других пространственных механизмов для передачи вращения между валами, взаи-имное положение которых во время движения может изменяться. Эти механизмы получили название универсальных шарниров.
Для передачи вращения между скрещивающимися осями используются обычно четырехзвенные пространственные механизмы с низшими парами. К пространственным механизмам с низшими парами относятся также винтовые механизмы, в состав которых входят винтовые пары. Наконец, могут быть плоские и пространственные механизмы с одними поступательными парами. Элементы поступательных пар в этих механизмах обычно выполняются в виде клиньев, и механизмы называются клиновыми.
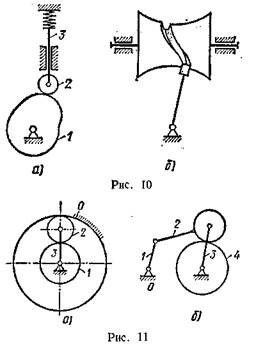
Кулачковые механизмы.Кулачком называется звено, которому принадлежит элемент высшей пары, выполненный в виде поверхности переменной кривизны. Механизм, в состав которого входит кулачок, называется кулачковым механизмом. На рис. 10, а показана схема плоского кулачкового механизма. Кулачок 1, напоминающий по форме сжатый кулак, имеет поверхность переменной кривизны, которая соприкасается с роликом 2, образуя высшую пару. Постоянное соприкасание элементов высшей пары обеспечивается пружиной, помещенной между стойкой и выходным звеном 3.
Кулачковые механизмы могут быть не только плоскими, но и пространственными (рис. 10, б). Разнообразие форм, которые можно придать кулачку, определяет чрезвычайное разнообразие возможных преобразований движения, выполняемых кулачковыми механизмами.
Зубчатые механизмы. Зубчатым механизмом называется механизм, в состав которого входят зубчатые звенья. По ГОСТ 16530—70 зубчатое
звено определяется как звено, имеющее выступы (зубья) для передачи движения посредством взаимодействия с выступами другого звена (тоже зубчатого). Каждый зуб может рассматриваться как кулачок, а весь зубчатый механизм — как многократно повторенный кулачковый механизм.
Вращающееся зубчатое звено называется зубчатым колесом. На схеме механизма зубчатые колеса изображаются окружностями, которые перекатываются без скольжения. Например, на рис. 11, а показан зубчатый планетарный механизм, в котором колесо 2 (сателлит) вращается вокруг своей оси и одновременно движется вокруг оси центрального (солнечного) колеса, т. е. совершает движение, подобное движению планеты (отсюда название механизма). Иногда зубчатые механизмы комбинируются с шарнирными. На рис. 11, б показан шарнирно-зубчатый (по другой терминологии, зубчато-рычажный) механизм, составленный из кривошипно-коромысло-вого шарнирного четырехзвенника и двух зубчатых колес, одно из которых неподвижно соединено с шатуном 2, а другое (центральное колесо 4) имеет ось вращения, совпадающую с осью вращения коромысла 3.
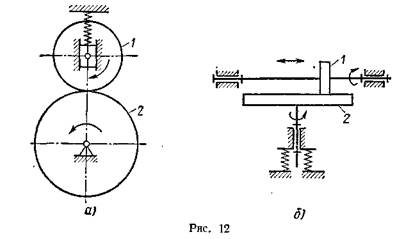
Фрикционные механизмы.Механизмы, в которых для переоачи движения между соприкасающимися звеньями используется трение, называются фрикционными. Например, передача вращения с постоянным отношением угловых скоростей (передаточным отношением) достигается путем создания трения на цилиндрических поверхностях фрикционных колес 1 и 2 (рис. 12, а). Передаточное отношение можно регулировать в некоторых пределах, если применить лобовую фрикционную передачу, в которой ролик 1 может устанавливаться на различных расстояниях от оси вращения звена 2 (рис. 12, б). Механизмы, в которых передаточное отношение может регулироваться, называются бесступенчатыми передачами.
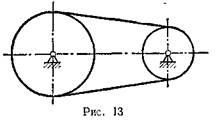
Механизмыс гибкими звеньями.Под гибкими звеньями (иногда гибкими связями) понимаются обычно ремни, канаты, цепи, нити, которые охватывают два звена или более и устанавливают определенную связь между перемещениями этих звеньев. На рис. 13 показан простейший механизм с гибким звеном, который в отличие от зубчатых и фрикционных механизмов может служить для передачи вращения от одного звена к другому при значительных расстояниях между осями их вращения. В зависимости от типа гибкого звена этот механизм называется
ременной, канатной или цепной передачей.
Волновая передача.Еще сравнительно недавно считалось, что де-
формации звеньев незначительны и не влияют заметно на основные свойства механизмов. Однако в последние годы появились новые механизмы, само действие которых основано на деформации одного или нескольких звеньев. В качестве примера рассмотрим волновую передачу (рис. 14), предназначенную для передачи вращения через герметичную стенку, разделяющую пространства А и Б. Передача может быть выполнена или как фрикционная, или как зубчатая с большим числом зубьев. Все звенья передачи жесткие, кроме звена 2, которое называется гибким колесом и может деформироваться при вращении генератора 1, принимая овальную форму с большой осью, направленной по линии, соединяющей центры роликов генератора. Конструктивно гибкое звено 2 выполнено в виде тонкостенного стакана, один конец которого неподвижно связан со стойкой, разделяющей пространства А и Б, а другой конец, деформируясь при вращении генератора 1, вызывает перемещение зубьев как колеса 2, так и колеса 3 (жесткого колеса). Таким образом, колесо 3, находясь в пространстве А, получает вращение от
зубьев колеса 2, расположенных на внешней стенке стакана, в то время как генератор 1, вызывающий это движение зубьев, вращается внутри стакана. Этим достигается герметичное разделение пространств А и Б посредством стенки стакана и одновременно передается вращение без нарушения герметичности стенки. Передача называется волновой по-
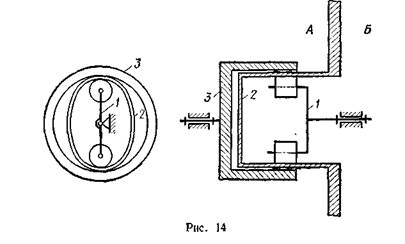
тому, что звено 2 в целом остается неподвижным, но при вращении генератора по нему перемещается волна деформации, вызывающая небольшие перемещения зубьев. Волновая передача применяется также
для получения больших передаточных отношений, причем в качестве неподвижного звена может быть принято звено 2 и даже генератор 1.
Гидравлические и пневматические механизмы.Гидравлическим называется механизм, в котором преобразование движения происходит посредством твердых и жидких тел. На рис. 15 показана схема гидравлического механизма с применением условных обозначений по ГОСТ 2781—68 и 2782—68. Механизм предназначен для привода в движение поршня 1 и потому называется гидроприводом. Поршень 1 движется направо или налево в зависимости от положения подвижного элемента распределителя 2. Этот элемент поочередно получает движение от электромагнитов 3 и 4. Если оба электромагнита выключены, то подвижный элемент распределителя 2 занимает среднее положение, показанное на схеме. В этом положении перекрыты обе линии, по которым жидкость может поступать в цилиндр 5. При включении электромагнита 3 его сердечник передвигает подвижный элемент распре
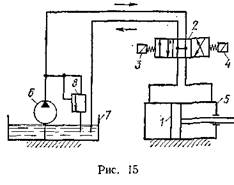
делителя вправо. Чтобы представить себе действие распределителя в новом положении, надо мысленно передвинуть на место исходной (средней) позиции квадрат, расположенный слева, оставляя линии связи на месте. Тогда правая полость цилиндра 5 соединяется с насосом 6, а левая — с баком 7 и поршень под действием давления жидкости перемещается влево. При включении электромагнита 4 подвижный элемент распределителя 2 перемещается влево, а поршень 1 — вправо. В схеме предусмотрен переливной клапан 8 для перелива жидкости в бак при повышении ее давления.
Схема пневматического механизма имеет аналогичный вид, только насос 6 заменяется источником сжатого воздуха, а вместо соединения с баком 7 выполняется соединение с атмосферой.
Дата добавления: 2015-12-29; просмотров: 7795;