Лекция 2. СТРУКТУРНЫЙ СИНТЕЗ МЕХАНИЗМОВ
Число степеней свободы механизма.Шесть степеней свободы твердого тела, свободно движущегося в пространстве, можно рассматривать также как шесть независимых координат, определяющих его положение (например, три координаты начала подвижной системы координат, связанной с телом, и три угла Эйлера, определяющие расположение осей подвижной системы координат относительно неподвижной).
Их принято называть обобщенными, так как они определяют положение всего твердого тела. Аналогично, обобщенными координатами механизма называют независимые между собой координаты, определяющие положения всех звеньев механизма относительно стойки. Число обобщенных координат механизма равно числу степеней свободы механизма, если все связи в кинематических парах — геометрические, т. е. налагают ограничения только на положения (координаты) точек звеньев.
Общее число координат, определяющих положение п подвижных звеньев механизма, равно 6д. Каждая кинематическая пара класса т.
дает т уравнений связи, в которые входят координаты звеньев. Общее число этих уравнений равно

где р5 — число пар пятого класса, р4 — число пар четвертого класса, и т. д.
Если все уравнения связи независимы, т. е. ни одно из них не может быть получено как следствие других, то разность между общим числом координат и числом уравнений, связывающих эти координаты, дает число независимых координат (число степеней свободы механизма)

Для плоского механизма, т. е. механизма, все подвижные звенья которого совершают плоское движение, параллельное одной и той же неподвижной плоскости, формула (2.1) принимает вид

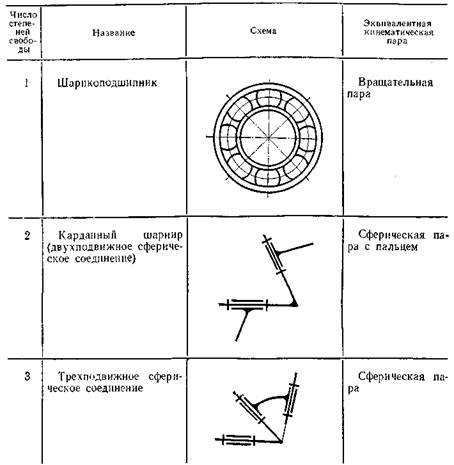
так как в плоском движении положение твердого тела определяется тремя координатами и соответственно кинематические пары могут быть только одноподвижными (пятого класса) и двухподвижными (четвертого класса). Для этих пар сохранены обозначения с индексами классов пар, хотя в плоских механизмах относительная подвижность пары не связана однозначно с ее классом. Например, сферическая пара (третьего класса) в плоском механизме кинематически эквивалентна вращательной паре, цилиндрическая пара (четвертого класса) также эквивалентна вращательной, если ось цилиндра перпендикулярна плоскости движения. Кроме того, заметим, что в плоских механизмах одноподвижные пары обычно являются низшими, а двухподвижные — высшими. Расположение кинематических пар должно обеспечивать всем звеньям плоское движение, параллельное одной и той же неподвижной плоскости. Например, в механизме с одними вращательными парами, который называется шарнирным, оси всех пар должны быть параллельны между собой.
Структурный синтез механизмов. Структурным синтезом механизма называется проектирование структурной схемы механизма, под которой понимается схема механизма, указывающая стойку, подвижные звенья, виды кинематических пар и их взаимное расположение. Структурная схема может быть представлена или графически с применением условных обозначений звеньев и кинематических пар, или же аналитической записью, допускающей применение ЭВМ.
Для механизмов, в состав которых входят только незамкнутые кинематические цепи, возможные варианты их структурных схем находятся при заданном числе степеней свободы непосредственно по формуле (2.1). В механизмах с незамкнутыми кинематическими цепями число подвижных звеньев равно числу кинематических пар и формула (2.1) принимает вид

т. е. число степеней свободы механизма равно сумме подвижностей кинематических пар.
В табл. 3 приведены некоторые структурные схемы механизмов манипуляторов. Звенья механизма обозначены арабскими цифрами.
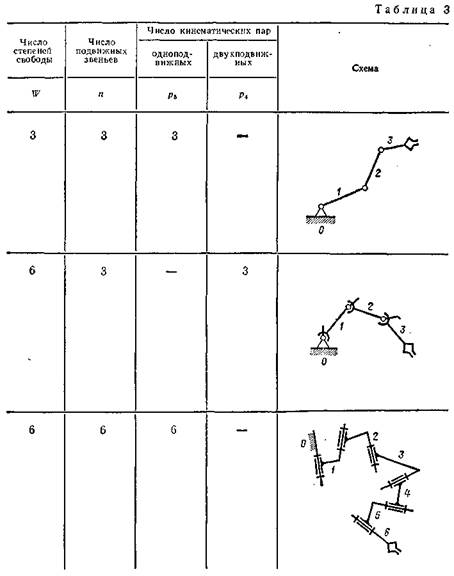
Элементы кинематических пар, принадлежащие стойке, отмечены под-штриховкой оси или треугольниками с подштриховкой. На последнем звене механизма, которое входит только в одну кинематическую пару, условно показан захват (по другой терминологии — схват), т. е. устройство, позволяющее подобно пальцам человека захватывать перемещаемый предмет. Кинематические пары с числом степеней свободы
более двух применяются здесь редко. Сферическая пара с пальцем обычно выполняется в виде карданного шарнира (см. табл. 2).
Для механизмов, в состав которых входят замкнутые кинематические цепи, вначале устанавливают возможные варианты этих цепей, а затем из каждой кинематической цепи получают несколько различных механизмов, принимая поочередно за стопку различные звенья цепи. Например, для плоских шарнирных механизмов с одной степенью свободы по формуле (2.2)

Наименьшее целое число /г>1, при котором удовлетворяется это уравнение, равно трем (р6=4), т. е. механизм должен иметь четыре звена (считая и стойку),которые последовательно соединяются вращательными парами, образуя замкнутую кинематическую цепь. На рис. 2
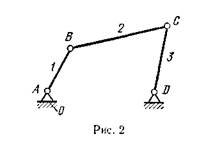
показана структурная схема механизма, называемого шарнирным че-тырехзвенником, который образуется из кинематической цепи ABCD, если за стойку принять звено AD. Из той же кинематической цепи можно образовать еще три механизма, принимая за .стойку какое-либо другое звено (АВ, или ВС, или CD).
Для пространственного механизма, в котором все звенья образуют только вращательные пары с осями, расположенными как угодно в пространстве, по формуле (2.1)

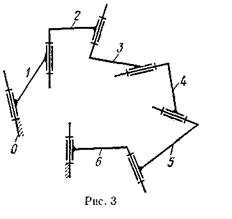
Это уравнение в целых числах удовлетворяется при п=6 и р5=7, т. е. механизм должен иметь 7 звеньев (считая и стойку), которые последовательно соединяются между собой при помощи вращательных пар, образуя замкнутую семизвенную кинематическую цепь. Полученный механизм называется пространственным шарнирным семизвенником. Его структурная схема показана на рис. 3.
Число звеньев в пространственных механизмах можно уменьшить, если кроме одноподвижных пар применять пары с большей подвижностью. Пусть, например, для механизма с одной степенью свободы п=2. По формуле (2.1),

Это уравнение в целых числах удовлетворяется при следующих сочетаниях:
Полученные сочетания определяют только числа кинематических пар различной подвижности. Для получения всех возможных кинематических цепей, удовлетворяющих поставленным условиям, надо еще указать варианты, отличающиеся последовательностью расположения кинематических пар. Например, две одноподвижные пары могут быть смежными и несмежными. Кроме того, одноподвижная пара может быть вращательной, поступательной, винтовой; двухподвижная пара может быть цилиндрической, сферической с пальцем и т. д. Поэтому общее число вариантов замкнутых кинематических цепей, а следовательно и механизмов, получается достаточно большим.
Начальные звенья. За обобщенные координаты механизма можно взять любые переменные координаты, определяющие положения одного или нескольких звеньев механизма. Звено, которому приписывается одна или несколько обобщенных координат механизма, называется начальным звеном. Происхождение этого термина связано с тем, что определение положений всех звеньев механизма начинается с определения положений начальных звеньев.
В механизме с одной степенью свободы — одно начальное звено и за обобщенную координату обычно принимается или угловая координата вращающегося звена, или линейная координата прямолинейно движущегося звена. Начальное звено не обязательно совпадает с входным звеном. Можно за начальное звено взять выходное звено или даже промежуточное, если при этом упрощается анализ механизма. В механизмах с двумя степенями свободы могут быть или два начальных звена, если за обобщенные координаты приняты координаты двух различных звеньев, или одно начальное звено, если оно образует со стойкой двухподвижную пару.
Образование плоских и пространственных механизмов путем наслоения структурных групп (групп Ассура). Для структурного синтеза многозвенных механизмов с числом звеньев более четырех непосредственный перебор всех возможных вариантов по формулам (2.1) и (2.2) оказывается затруднительным. В этом случае более удобно находить структурные схемы механизмов путем последовательного наслоения некоторых кинематических цепей, называемых структурными группами или группами Ассура1. Принцип этого наслоения покажем на примере образования плоского шестизвенного шарнирного механизма.
В механизме с одной степенью свободы положения всех звеньев определяются заданием одной обобщенной координаты, или, что то же, положением одного начального звена. На рис. 4, а показано начальное звено 1, которое входит во вращательную пару со стойкой 0. Число степеней свободы этого звена относительно стойки W—1 (одна обобщенная координата cpi). Механизм в целом тоже должен иметь W=\. Поэтому мы можем присоединять (наслаивать) только такие кинематические цепи, которые удовлетворяют условию W=0. В нашем случае согласно формуле (2.2) это условие имеет вид
Зга—2р5=0. (2.4)
Простейшая кинематическая цепь, удовлетворяющая

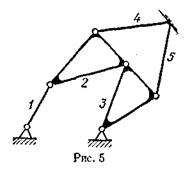
условию (2.4) при п=2 и р5=3, называется двухповодковой группой (рис. 4,6). В ней одна из вращательных пар (внутренняя) образуется звеньями группы, а другие две (внешние) образуются после присоединения звеньев группы к каким-либо двум звеньям механизма. В нашем примере присоединение двухповодковой группы одной внешней парой к начальному звену, а другой — к стойке не изменяет числа степеней свободы, которое остается равным 1. Далее можно присоединить к звену 2 и к стойке 0 вторую двухповодковую группу, состоящую из звеньев 4 и 5 (рис. 4, в). В результате получим шестизвенный шарнирный механизм с W—\ (рис. 4, г). Вторую группу из звеньев 4 и 5 можно присоединять также к звеньям 2 и 3. Тогда получится другой тип ше-стизвенного шарнирного механизма (рис. 5).
Теперь можно дать общее определение термина «структурная группа». Структурной группой называется кинематическая цепь, число степеней свободы которой равно нулю относительно элементов ее внешних пар, причем группа не должна распадаться на более простые кинематические цепи, удовлетворяющие этому условию. Например, кинематические цепи, состоящие из звеньев 2, 3, 4 и 5 (см. рис. 4 и 5), распадаются на две двухповодковые группы.
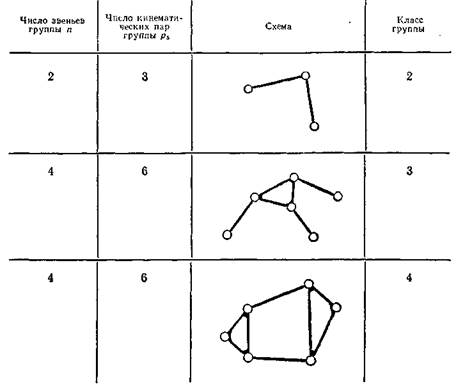
В табл. 4 показаны некоторые плоские структурные группы, состоящие из звеньев, входящих во вращательные пары. По предложению И. И. Артоболевского 1 номер класса группы равен числу кинематических пар, входящих в замкнутый контур, образованный внутренними кинематическими парами.
Принцип наслоения структурных групп распространяется на все виды механизмов, составленных только из твердых тел. Для плоских механизмов с одно- и двухподвижными парами структурные группы удовлетворяют условию

Структурные группы пространственных механизмов удовлетворяют аналогичному условию

Как плоские, так и пространственные структурные группы используются не только при структурном синтезе, но и при анализе механизмов.
Избыточные связи. При выводе формулы (2.1) предполагалось, что все уравнения связи независимы. В некоторых механизмах это условие не выполняется. Тогда разность между общим числом уравнений связи и числом независимых уравнений связи называется числом избыточных связей, а механизм, в котором общее число уравнений связи
больше числа независимых уравнений связи, называется механизмом с избыточными связями.
Обозначая число избыточных связей через q, получаем, что число независимых уравнений связи равно

Следовательно, число независимых координат (число степеней свободы механизма)

Уравнение (2.7) содержит две неизвестные величины (W и q), так как число избыточных связей в общем случае можно определить лишь путем анализа уравнений связи. Однако в некоторых простейших случаях величина W может быть получена путем непосредственного решения задачи о положениях звеньев механизма. Тогда из уравнения (2.7) находим число избыточных связей:

Избыточные связи получаются обычно при конструировании плоских механизмов. Например, в плоском шарнирном четырехзвеннике (см. рис. 2) W—\ и по формуле (2.8) получаем q~\—6-3+5-4=3, т. е. в этом механизме есть три избыточные связи. Избыточными они называются потому, что их можно устранить, сохраняя заданное число степеней свободы W (в нашем примере W=l). Устранение избыточных связей выполняется изменением подвижностей отдельных кинематических пар, причем для одного и того же механизма с избыточными связями можно найти несколько вариантов механизмов без избыточных связей. Например, в шарнирном четырехзвеннике можно любые две вращательные пары заменить: одну на сферическую, а другую на сферическую с пальцем (первый вариант), или одну на сферическую, а другую на цилиндрическую (второй вариант). Легко проверить по формуле (2.8), что в обоих вариантах механизмов отсутствуют избыточные связи.
Возможны и другие варианты устранения избыточных связей в шарнирном четырехзвеннике. Следовательно, в этом механизме, как и в любом другом механизме с избыточными связями, нельзя указать, какая именно связь является избыточной. Можно лишь определить число этих связей и затем в зависимости от конструктивных условий соответственно уменьшить общее число связей.
Наличие избыточных связей в механизмах ответственного назначения требует повышенной точности изготовления элементов кинематических пар во избежание дополнительных нагрузок на звенья механизма из-за их деформации. Например, если в шарнирном четырехзвеннике непараллельность осей вращательных пар не может быть компенсирована зазорами между элементами этих пар, то его надо рассматривать как пространственный механизм с произвольным расположением осей вращательных пар. Число степеней свободы определяется в этом случае по формуле (2.1):

т. е. получается не механизм, л ферма (.дважды статически неопределимая), и его звенья могут двигаться только за счет деформаций. Эти деформации вызывают дополнительные нагрузки на звенья и увеличение сил трения в кинематических парах. Если же устранить избыточные связи, то можно снизить точность изготовления-при одновременном уменьшении дополнительных нагрузок на звенья механизма 1. Необходимо только проверять жесткость всей конструкции, с тем чтобы не возникли дополнительные нагрузки от вредных колебаний.
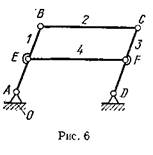
Иногда избыточные связи умышленно вводят в состав механизма для повышения его жесткости или для устранения неопределенности движения звеньев в некоторых положениях. Эти избыточные связи существуют при выполнении определенных геометрических соотношений в механизме. Например, в механизме сдвоенного параллелограмма (рис. 6) имеются соотношения AB = CD, BC=AD (т. е. фигура ABCD — параллелограмм) и AE=FD, EF=AD (т. е. фигура AEFD — тоже параллелограмм). По свойству параллелограмма расстояние между точками Е и F всегда равно отрезку AD, если эти точки находятся на равных расстояниях от точек А и D. Поэтому введение дополнительного звена 4 при условии, что EF=AD, не вносит новых геометрических связей и число степеней свободы остается равным 1, хотя по формуле (2.2) Г=3-4—2-6=0.
Если точность выполнения указанных геометрических соотношений окажется недостаточной, например AE^FD, то расстояние EF уже не будет равно AD и движение станет невозможным, т. е. число степеней свободы действительно будет равно нулю.
В заключение еще раз подчеркнем, что формулы (2.1) и (2.2) предназначены в основном не для определения числа степеней свободы, а для структурного синтеза механизмов без избыточных связей.
Дата добавления: 2015-12-29; просмотров: 4060;