Статическая характеристика пропорционального регулятора
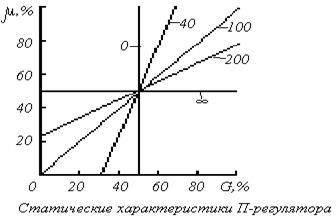 При D=200% изменения параметра G на 10% вызовет перемещения регулирующего органа на μ=5%.
При D=200% изменения параметра G на 10% вызовет перемещения регулирующего органа на μ=5%.
Из-за наличия жесткой обратной связи пропорциональные регуляторы не способны поддерживать регулируемый параметр на точно заданном значении.
У пропорциональных регуляторов всегда есть остаточное отклонение регулируемого параметра от заданного значения или статическая ошибка регулирования.
Коэффициент пропорциональности S связан с пределом пропорциональности D выражением:
S=1/D*100%,
Где S - в долях единиц, D - в %.
Предел пропорциональности D – изменение регулируемого параметра, выраженное в %, соответствующее полному перемещению регулирующего органа от «открыто» до «закрыто».
Закон П-регулятора записывают в виде:
-µ=1/D *G+µ0,
где µ0 – начальное положение регулирующего органа.
Знак «-» обозначает обратное действие (когда уровень G увеличивается, то μ уменьшается, т.е. клапан прикрывается).
Предел пропорциональности D является единственным параметром настройки П-регулятора. В промышленных регуляторах D изменяется от 5 до 3000%.
П-регуляторы на возмущение регулируют практически мгновенно, то есть обладают хорошим быстродействием.
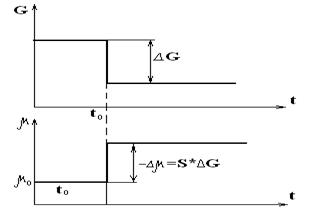 Динамическая характеристика пропорционального регулятора
Динамическая характеристика пропорционального регулятора
Если на регулятор нанести ступенчатое возмущение, то регулирующий орган перемещается практически мгновенно на величину ∆μ – это свидетельствует о том, что П-регуляторы обладают высоким быстродействием.
Чем меньше настраиваемый параметр регулятора D (предел пропорциональности), тем более колебательным будет переходной процесс и тем меньше по величине будет статическая ошибка регулирования ∆Gст.
Дата добавления: 2015-12-16; просмотров: 2246;