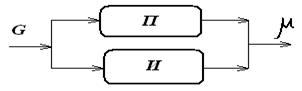
Структурная схема ПИ-регулятора
 ∆G = G - GЗД
∆G = G - GЗД
При нанесении на ПИ-регулятор ступенчатого возмущения первоначально срабатывает пропорциональная часть регулятора, перемещая мгновенно клапан на величину ∆µПР. Затем в действие вступает интегральная часть регулятора, которая медленно во времени перемещает клапан в том же направлении до завершения процесса регулирования, т.е., когда регулируемый параметр G будет доведен до GЗД.
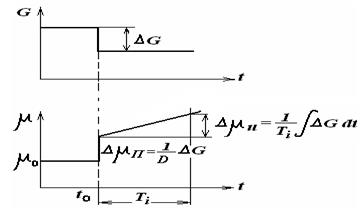 Динамическая характеристика ПИ-регулятора:
Динамическая характеристика ПИ-регулятора:
Представляет собой сумму динамических характеристик П- и И-регуляторов.
Закон регулирования ПИ-регулятора в дифференциальной форме:
 ,
,
где  - пропорциональная составляющая,
- пропорциональная составляющая,  - интегральная составляющая.
- интегральная составляющая.
Закон регулирования ПИ-регулятора в интегральной форме:
 ,
,
где  - пропорциональная составляющая,
- пропорциональная составляющая,  - интегральная составляющая.
- интегральная составляющая.
Ti – время изодрома - этото время, за которое перемещается клапан под действием интегральной составляющей на такую же величину, на которую он предварительно переместился под воздействием пропорциональной составляющей.
ПИ-регуляторы имеют 2 параметра настройки:
-предел пропорциональности D от 5 % до 3000%;
-время изодрома Ti (время интегрирования 5 сек ÷ 100 мин).
Подбором этих параметров настройки добиваются желаемого вида переходного процесса. Оптимальным является переходной процесс с 20% перерегулированием. Если Ti= ∞,то ПИ-регулятор превращается в чисто П-регулятор. На пневматических регуляторах отключение интегральной части осуществляется путем перекрытия дросселя для настройки Ti.
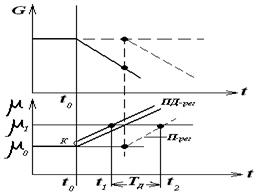
Пропорционально-дифференциальные (ПД-регуляторы)
Если нагрузка объекта изменяется часто и резко, и при этом объект имеет существенное запаздывание, то ПИ-регулятор дает неудовлетворительное качество регулирования. Тогда целесообразно в закон регулирования вводить дифференцирующую составляющую, то есть воздействовать на регулирующий орган дополнительно по величине первой производной от изменения регулируемого параметра.
 Закон регулирования ПД-регулятора:
Закон регулирования ПД-регулятора:
 ,
,
где  - пропорциональная составляющая,
- пропорциональная составляющая,  - дифференциальная составляющая.
- дифференциальная составляющая.
Тд – параметр настройки дифференциальной составляющей и его можно изменять от 5 сек до 10 мин. Если объект обладает определенным запаздыванием y = k∙x, y’= (k∙x)’ = k, где k = tg угла наклона прямой. За счет дифференциальной составляющей упреждается перемещение регулирующего органа.
Время дифференцирования (время предварения) Тд – это интервал времени между моментами достижения регулирующим органом одинакового положения при наличии дифференциальной составляющей и без нее.
Чем больше время дифференцирования Тд, тем больше скачок в перемещении регулирующего органа.
При использовании управляющих ЭВМ закон регулирования устанавливается программно (есть соответствующая программа).
Пропорционально-интегрально-дифференциальные (ПИД) регуляторы
Закон регулирования ПИД-регулятора:
 ,
,
где  - пропорциональная,
- пропорциональная,  - интегральная,
- интегральная,  - дифференциальная составляющие.
- дифференциальная составляющие.
ПИД-регуляторы имеют 3 параметра настройки:
- D – предел пропорциональности (изменяется от 5% до 3000%);
-Тi – время изодрома (5 сек - 100 мин);
Тд – время предворения (5 сек - 10 мин).
ПИД закон регулирования дает лучшие качества регулирования по сравнению с другими законами.
∆у - максимальное динамическое отклонение, tР - время переходного процесса (время регулирования) – чем меньше эти величины, тем лучше качество регулирования.
Дата добавления: 2015-12-16; просмотров: 2233;