Автоматические регуляторы (АР).
Классификация АР:
по конструктивному исполнению регуляторы бывают:
- приборные;
- агрегатные;
- микропроцессорные.
Приборные встраивают внутри измерительных приборов.
Агрегатные выполняют в виде отдельных блоков, из которых можно составить требуемый закон регулирования.
В зависимости от регулируемой величины приборные регуляторы называют по названию измеряемого и регулируемого параметра. Например, регуляторы температуры, …давления, …уровня, … концентрации.
по роду действия:
- регуляторы прерывистого действия, РПД;
- регуляторы непрерывного действия, РНД.
РПД делятся на релейные (позиционные) и импульсные.
В импульсных измер-е регулируемого параметра осущ. непрерывно, а регулир-е возд-е оказ-тся периодически через опред-е инт-лы времени опред-й длительности. Для созд-я импульсных АСР на выходе управ-х ЭВМ устан-т цифроимпульсный преобразователь ЦИП.
У непрерывных регуляторов измер-е регулир-го параметра осуществляется непрерывно и так же непрерывно оказ-тся регулир-е возд-е на объект.
Выбирают род действия регулятора в зависимости от динам. хар-к ОУ
при  > 0,2 (0,1) – релейный регулятор;
> 0,2 (0,1) – релейный регулятор;
= 0,2  1 – регулир-р непрер-го действия;
1 – регулир-р непрер-го действия;
> 1 (0,6) - импульсный регулятор.
по способу действия:
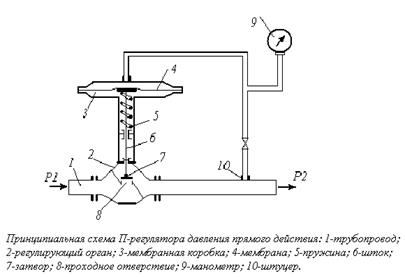
- регуляторы прямого действия;
-регуляторы косвенного (непрямого) действия.
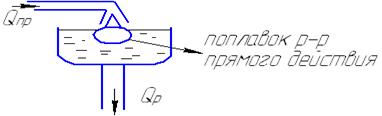
Регулятор непрямого действия использует энергию извне, т.е. требуют подачи энергии для питания.
По виду используемой энергии регуляторы бывают:
- электрический;
- пневматические (используют энергию сжатого воздуха);
- гидравлические (используют энергию жидкости под давлением);
- комбинированные.
по законам регулирования регуляторы классифицируют:
- Пз – позиционные (релейные);
- П – пропорциональные регуляторы (статические);
- И – интегральные (астатические);
- Пи – пропорционально-интегральные (изодромные);
(Изодром – постоянно выравнивающий);
- ПД – пропорционально-диффереренциальные регуляторы (статические с предварением или с упреждением);
- ПИД – пропорционально-интегрально-дифференциальные (изодромные с предварением).
Закон регулирования представляет собой зависимость выходной величины регулятора (положение регулирующего органа  ) от изменения регулируемого параметра
) от изменения регулируемого параметра  . Зависимость закона регулирования в общем виде записывается:
. Зависимость закона регулирования в общем виде записывается:  .
.
Позиционные (релейные) регуляторы
Позиционные регуляторы бывают:
- 2-хпозиционные;
- 3-хпозиционные;
- многопозиционные;
Двухпозиционнымназывается регулятор, в котором в зависимости от значения регулируемого параметра регулирующий орган может занимать только два фиксированных положения: открыто или закрыто, (включено или выключено).
Закон регулирования двухпозиционного регулятора:
µ=1 при G < GЗД (включено);
µ=0 при G > GЗД (отключено).
Переходной процесс регулирования – изменение регулируемого параметра во времени в процессе регулирования.
Вид переходного процесса двухпозиционногорегулирования представлено ниже:
а) двухпозиционное регулирование без зоны нечувствительности;
б) двухпозиционное регулирование с зоной нечувствительности
а) 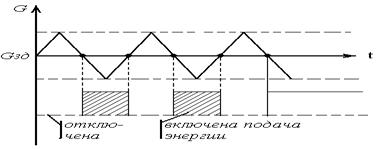
б) 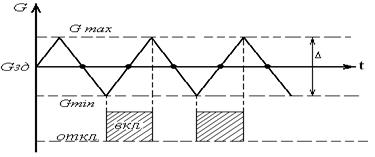
Закон регулирования двухпозиционного регулятора с зоной нечувствительности:
µ = 1 при G<GЗД + ∆/2 ;
µ = 0 при G>GЗД - ∆/2 .
(G – значение регулируемого параметра; GЗД – заданное значение регулируемого параметра; μ – положение регулирующего органа.)
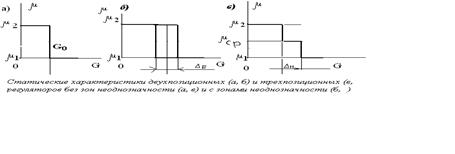
Двухпозиционные регуляторы с зоной нечувствительности (неоднозначности) имеют единственный параметр настройки − величину зоны нечувствительности ∆. С увеличением зоны нечувствительности качество регулирования ухудшается, но уменьшается число срабатывания аппаратуры. Под качеством регулирования понимают величину отклонения регулируемого параметра от заданного значения GЗД.
Трехпозиционные регуляторы.
Трехпозиционным называется регулятор, у которого в зависимости от значения регулируемого параметра регулирующий орган может занимать помимо двух крайних положений еще одно среднее положение.
Закон регулирования трехпозиционного регулятора:
μ = 1 при G<(GЗД - ∆/2) ;
μ = 0,5 при (GЗД - ∆/2)< G <(GЗД +∆/2) ;
μ = 0 при G>(GЗД + ∆/2) ;
Трехпозиционные регуляторы имеют существенное преимущество по сравнению с двухпозиционными регуляторами. Если при значении μСР можно установить равенство притока и оттока вещества или энергии в объекте, т.е. при µСР QПР = QРАСХ, то значение регулируемого параметра G практически не будет изменяться, т.е. будет находиться вблизи заданного значения GЗД
Пропорциональные (статические) регуляторы.
Пропорциональными (П-регуляторами) или статическими называются регуляторы, в которых перемещение регулирующего органа μ пропорционально величине отклонения регулируемого параметра от заданного значения.
-µ=S*G,
где µ − перемещение регулирующего органа;
G − изменение регулируемого параметра;
S − коэффициент пропорциональности;
Чем на большую величину отклоняется регулируемый параметр от заданного значения, тем на большую величину переместится регулирующий клапан. П-регуляторы могут регулировать параметры в пределах зоны регулирования D.
В пропорциональном регуляторе каждому значению регулируемого параметра соответствует свое строго определенное положение регулирующего органа: G1−µ1; G2−µ2;
Поэтому такие регуляторы называются еще регуляторами с отрицательной жесткой обратной связью.
Дата добавления: 2015-12-16; просмотров: 2232;