Исполнительные устройства
Выполняют команды регуляторов.
Исполнительные устройства (ИУ) включают два основных элемента:
1) регулирующий орган;
2) исполнительный механизм (ИМ)
Они предназначены для непосредственного показания управляющих воздействий на объект управления. Сигналы управляющих воздействий на ИМ подаются от автоматических регуляторов или от управляющей вычислительной машины УВМ.
Классификация ИМ:
1. электрические;
2. пневматические;
3. гидравлические;
4. электропневматические;
5. электрогидравлические;
6. пневмогидравлические.
По конструкции регулирующего органа:
1. заслоночные;
2. шаровые;
3. шланговые;
4. диафрагмовые;
5. односедельные;
6. двухседельные;
7. трехходовые.
По способу действия:
1. нормально открытый; закрытый клапан (входящий закрыт);
2. нормально закрытый; клапан открыт (в_ходящий открыт).
По функциональному назначению:
1. регулирующие;
2. запорные;
3. комбинирующие.
Регулирующийорган плавно изменяет расход среды в зависимости от полученного управляющего сигнала. Запорныеклапаныиспользуют для позиционного регулирования, имеют 2 положения: «открыт» – «закрыт».
По расходной характеристике:
1. линейная характеристика;
2. логарифмическая характеристика;
3. специальная расходная характеристика (нелинейная).
По конструкции исполнения:
1. обыкновенные;
2. пожаро- и взрывобезопасные.
Электрические ИМ
Электрические ИМ включают в себя:
1. электродвигатель с редуктором в качестве ИМ;
2. регулирующий орган, который механически связан с редуктором.
Используются исполнительные устройства с соленоидом в качестве ИМ. Такие ИУ используются для позиционирующего регулирования, т.е. они имеют два положения: «открыт» – «закрыт» (например, подано на соленоид напряжение или отсутствует).
Для непрерывного регулирования используются регулирующие органы с электродвигателем в качестве ИМ. Для управления ИМ (электродвигателями) необходимо предусмотреть магнитные пускатели. Используются обычно бесконтактные магнитные пускатели, которые управляются дискретным сигналом от регулятора или УВМ (0÷24В). Могут использоваться одно или трехфазные электродвигатели.
Пневматические ИМ (ПИМ)
Используются ПИМ 2-х видов:
· мембранные;
· поршневые.
Мембранный
| |
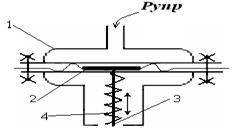
1 – корпус; 2 – вялая мембрана с жестким центром; 3 – шток; 4 – пружина.
Поршневой
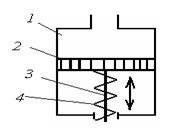
1 – цилиндр; 2 – поршень; 3 – шток; 4 – пружина.
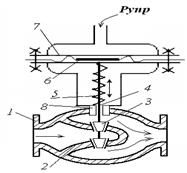
Мембранный исполнительный механизм с регулирующим органом
По сравнению с пневматическими ИМ (цилиндрическим) мембранный ИМ имеет значительно меньший ход регулирующего органа. Однако они имеют большие перестановочные усилия.
Регулирующий орган
1 – корпус регулирующего органа (РО);
2 – седло;
3 – двухседельный клапан;
4 – шток;
5 – пружина;
6 – вялая мембрана с жестким центром;
7 – верхняя тарелка;
8 – сальник уплотнительный;
Рупр – управляющий пневматический сигнал.
Двухседельный клапан более предпочтителен по сравнению с односедельным, т.к. давление потока разветвляется и в меньшей мере воздействует на мембрану.
Ходовая характеристика представляет собой зависимость перемещения РОот значения управляющего сигнала
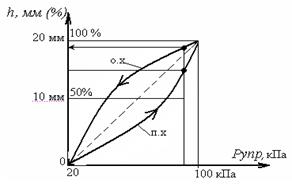 (─ ─ ─ ─) - ходовая характеристика ИМ.
(─ ─ ─ ─) - ходовая характеристика ИМ.
При наличии позиционера гистерезис полностью отсутствует.
Перемещение РО при увеличении управляющего сигнала и уменьшения его не совпадают. Это обусловлено наличием гистерезиса в ходовой характеристике ИМ. Обусловлен гистерезис в основном наличием трения в уплотнительном сальнике и зависит от чистоты обработки штока.
Максимально допустимое значение гистерезиса составляет не более 10%. Чтобы полностью избавиться от гистерезиса устанавливают на ИМ дополнительное устройство – позиционер. Это пневматический усилитель, который имеет отдельное питание и обратную связь со штоком.
На позиционер подается управляющий сигнал от регулятора, а выходной сигнал от позиционера подается на мембрану ИМ. На всех ИМ большого размера установка позиционера обязательна.
Рупр ·Fм = c·L
 – площадь мембраны, с – жесткость.
– площадь мембраны, с – жесткость.
Пропускная способность РО (k) – это расход жидкости в м3/ч, плотностью 1000 кг/м3. Пропускаемой РО при перепаде давления на нем 100 кПа (1 кгс/см2).
 ,
,
где k – зависит от поперечного сечения щели клапана и от величины перепада давления ΔР; ΔР – разность давлений до клапана и после; ρ – плотность среды, которая проходит через клапан.
Конструкции РО:
Односедельный РО
 Для управления заслонками и шиберами используют поршневые пневматические ИМ, которые имеют достаточно большой ход штока (максимально до 400 мм). Кроме того, поршневые ИМ выпускаются со встроенным позиционером, поэтому в их ходовой характеристике полностью отсутствует гистерезис.
Для управления заслонками и шиберами используют поршневые пневматические ИМ, которые имеют достаточно большой ход штока (максимально до 400 мм). Кроме того, поршневые ИМ выпускаются со встроенным позиционером, поэтому в их ходовой характеристике полностью отсутствует гистерезис.
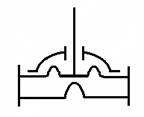 Диафрагмовый РО
Диафрагмовый РО
При увеличении управляющего сигнала шток перемещается вниз и уменьшает щель для прохода регулируемой среды. В данной конструкции отсутствует сальник, что существенно снижает гистерезис.
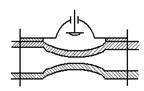 Шланговые РО
Шланговые РО
Расходная характеристика РО представляет собой зависимость величины расхода среды проходящий через клапан от степени его открытия.
Наиболее благоприятной для АСР является линейная расходная характеристика, однако получить такую характеристику затруднительно, т.к. требуется сложная конструкция золотника.
Автоматизированные системы управления технологическими процессами (АСУ ТП)
АСУТП – человеко-машинная система управления, предназначенная для выработки и реализации управляющих воздействий на объект управления в соответствии с принятым критерием управления, путем сбора и переработки информации с помощью средств вычислительной техники.
Совокупность совместно функционирующих АСУ ТП и технологического объекта управления называется автоматизированным технологическим комплексом (АТК)
Дата добавления: 2015-12-16; просмотров: 1270;