Классификация математических моделей 4 страница
На практике глобальная матрица жесткости строится в соответствии с вышеописанной процедурой, без учета ограничений на перемещения, что и было проделано выше. И только после этого, в матрицу и систему уравнений (10) вносятся изменения, позволяющие учесть наличие связей.
Рассмотрим в качестве примера систему, изображенную на рис.1. Очевидно, она имеет 8 степеней свободы.
Предположим, что нам удалось построить матрицы жесткости всех входящих в нее элементов и в соответствии с (11) сформировать из них глобальную матрицу жесткости и систему линейных алгебраических уравнений  или
или  .
.
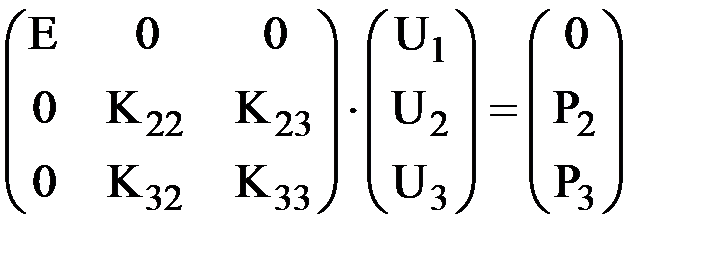
Поскольку узел 1 закреплен от смещений, все три его перемещения равны нулю. Следовательно, уравнения равновесия первого узла в данной системе (они выражаются матричным равенством  ) должны быть заменены условиями равенства нулю перемещений по направлению всех степеней свободы узла 1. Эти условия характеризуются матричным равенством
) должны быть заменены условиями равенства нулю перемещений по направлению всех степеней свободы узла 1. Эти условия характеризуются матричным равенством  . В результате система разрешающих уравнений МКЭ приобретет вид:
. В результате система разрешающих уравнений МКЭ приобретет вид:
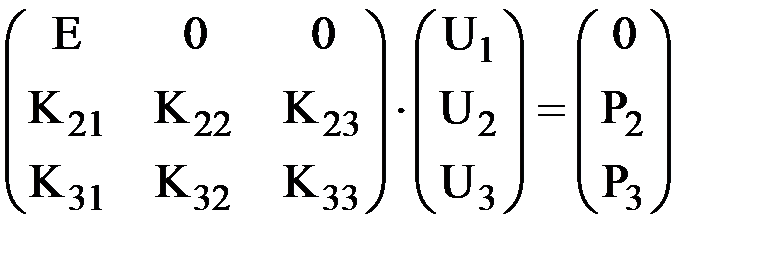 ,
,
где Е - единичная матрица.
При перемножении матриц блоки  и
и  должны быть умножены на блок
должны быть умножены на блок  , о котором заранее известно, что он является нулевым. Поэтому над данной системой можно выполнить еще одно преобразование:
, о котором заранее известно, что он является нулевым. Поэтому над данной системой можно выполнить еще одно преобразование:
Подобная замена не изменит решение системы уравнений, но сделает матрицу симметричной, что выгодно с точки зрения ее хранения в памяти компьютера и решения системы.
В развернутой форме полученная система будет иметь вид:
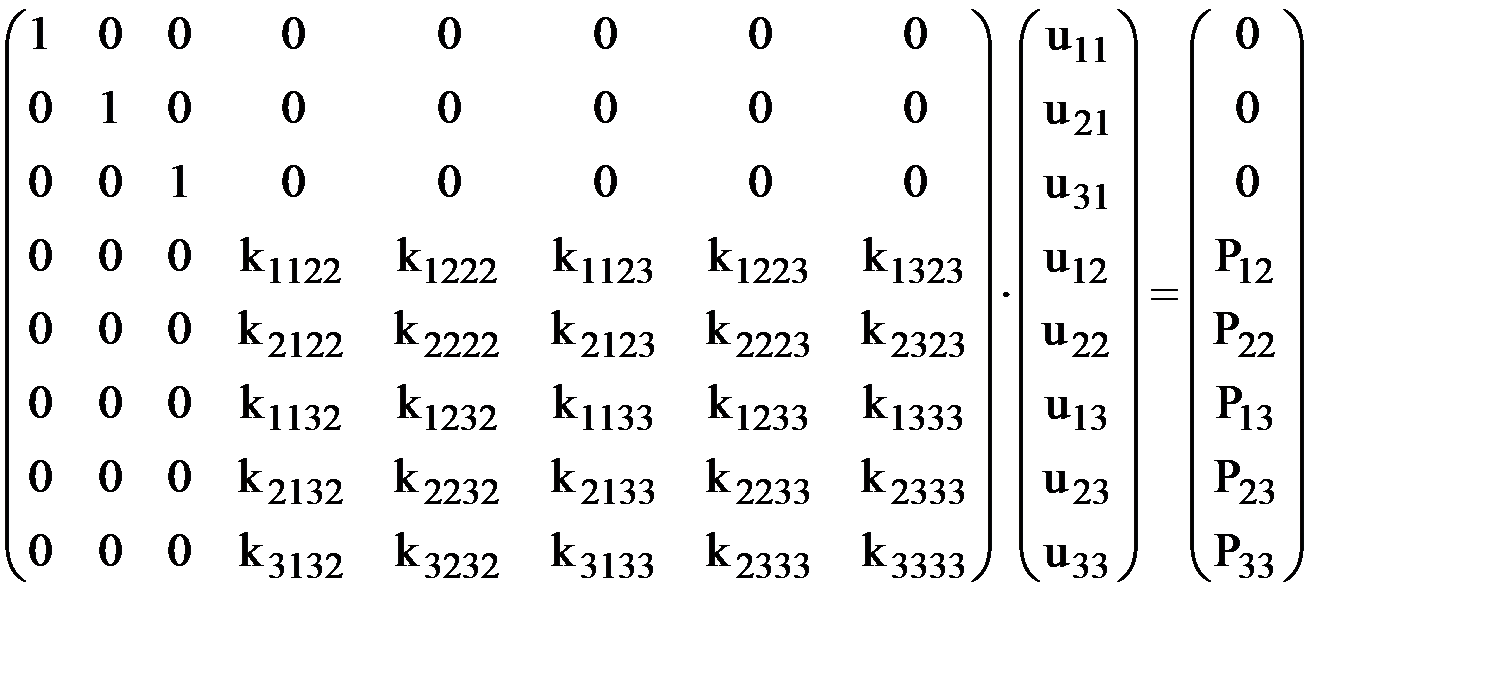 .
.
Таким образом, если перемещение по направлению одной из степеней свободы заранее задано равным нулю, все элементы матрицы системы разрешающих уравнений метода конечных элементов в соответствующей данному перемещению строке и столбце с тем же номером задаются равными нулю, за исключением элемента, стоящего на главной диагонали, который задается равным единице. Кроме того, элемент, стоящий в этой строке в векторе свободных членов также задается равным нулю.
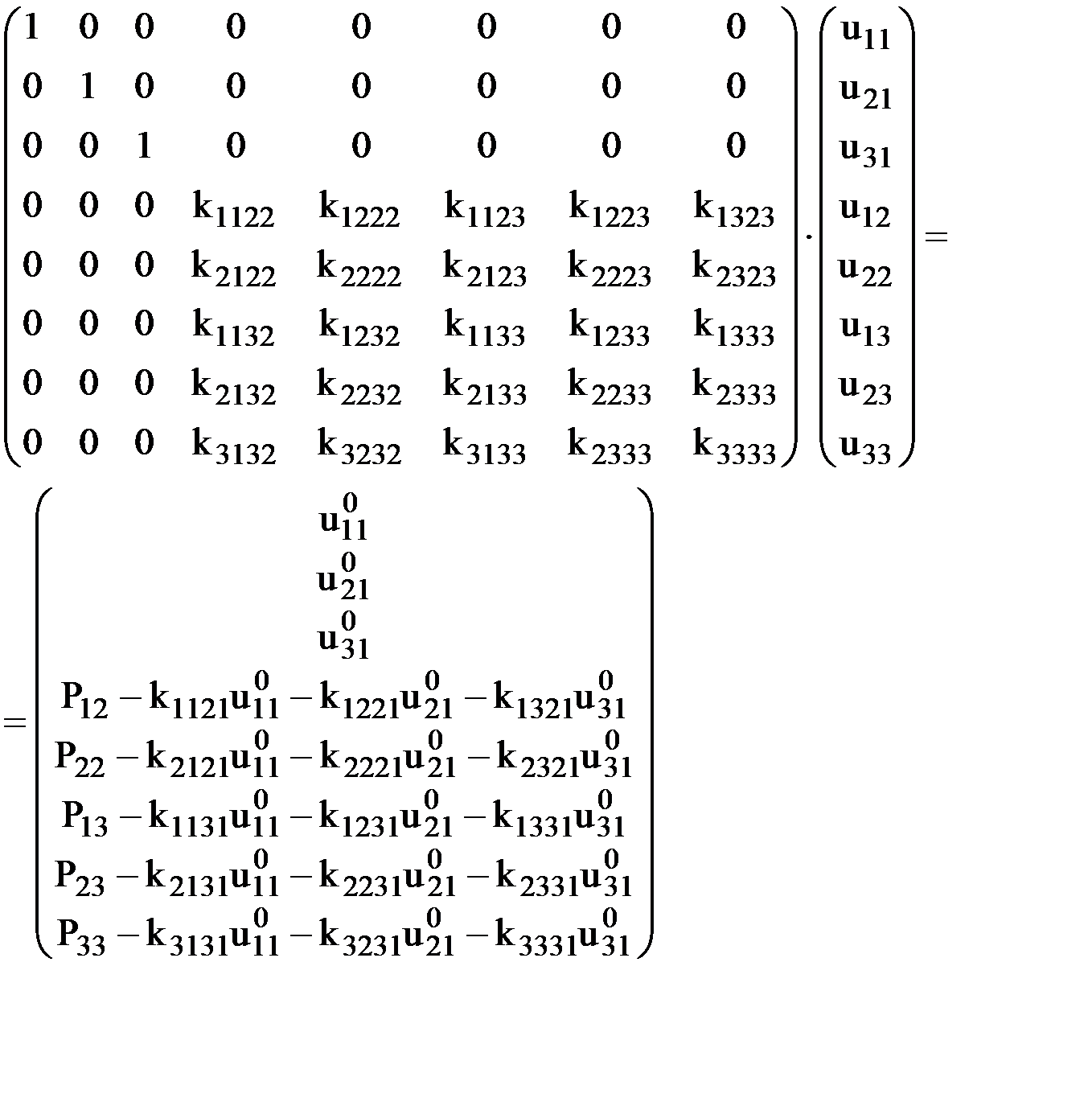
В случае, если заданные смещения в узле оказываются равными ненулевым величинам, например, для рассматриваемого случая  ,
,  ,
,  система уравнений метода конечных элементов приобретет следующий вид:
система уравнений метода конечных элементов приобретет следующий вид:
. 
Читателю предлагается убедиться в этом самостоятельно.
В результате решения системы уравнений МКЭ определяются все перемещения узлов конечно-элементной схемы. А значит, в формуле (2) для каждого элемента системы становятся известными вектора  . Зная их и матрицы жесткости элементов по этой формуле легко определяются усилия, действующие на каждый элемент со стороны узлов (т.е вектора
. Зная их и матрицы жесткости элементов по этой формуле легко определяются усилия, действующие на каждый элемент со стороны узлов (т.е вектора  ). Зная их значения, построить эпюры внутренних усилий на элементах не составит труда.
). Зная их значения, построить эпюры внутренних усилий на элементах не составит труда.
При необходимости определить усилия, действующие на элементы, в локальных системах координат, для каждого элемента следует по формуле (4) осуществить переход от найденных векторов  к векторам
к векторам  , и затем, найти искомые усилия (т.е. вектора
, и затем, найти искомые усилия (т.е. вектора  ) по формуле (6).
) по формуле (6).
На этом расчет системы на узловые воздействия заканчивается. Для получения окончательных значений внутренних усилий в стержнях системы, как уже упоминалось, необходимо сложить полученные от узловых воздействий внутренние усилия с усилиями, определенными при условии закрепления всех узлов (сложить решения задачи 1 и задачи 2).
При решения задачи методом конечных элементов на ЭВМ после задания исходных данных, а именно геометрии стержневой системы, жесткостных характеристик стержней, нагрузок и закреплений, от человека не требуется вмешательства для выполнения каких-либо промежуточных операций, например, создания основной системы или построения вспомогательных состояний. ЭВМ способна автоматически выполнить все вышеописанные процедуры: построение матриц жесткости элементов на основании хранящихся в памяти формул для библиотечных элементов, формирование глобальной матрицы жесткости, решение системы, определение усилий в стержнях элементов.
Алгоритм метода универсален, т.е. не зависит от того, является ли рассматриваемая система статически или кинематически определимой или неопределимой, а также от степени ее статической или кинематической неопределимости. Более того, МКЭ позволяет рассчитывать системы, состоящие не только из стержневых элементов, но и пластинчатых, оболочечных, трехмерных, разнообразных элементов на винклеровском основании и других элементов, матрицы жесткости которых учитываются в глобальной матрице жесткости системы также, как и матрицы жесткости стержневых элементов. Это, в частности, позволяет сразу подвергать расчету весь комплекс “сооружение-фундамент-основание”.
Современные программные комплексы[2], как правило, содержат мощные графические средства, позволяющие быстро и легко задать все исходные данные для расчета (препроцессор), а также просмотреть и проанализировать полученные результаты, выполнить подбор сечений стержней или арматуры в соответствии с нормативной документацией (постпроцессор). То есть работа с такими программными продуктами практически осуществляется по принципу “нажми на кнопку - получишь результат”. Тем не менее, при всей развитости и разнообразии препроцессорных и постпроцессорных средств в подобных программных комплексах, в основе их ядра (процессора) лежит программная реализация одного и того же алгоритма - алгоритма метода конечных элементов
Пример расчета стержневой системы методом конечных элементов.
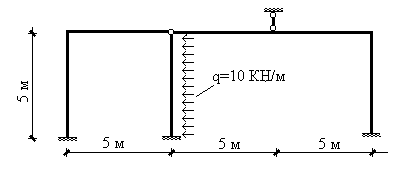 Рис. 31
Рис. 31
|
Выполним методом конечных элементов расчет системы, изображенной на рис.31. Как уже отмечалось, МКЭ - метод, ориентированный на использование ЭВМ. Объем вычислений при реализации этого метода, как правило, значительно превышает объем вычислений, который приходится проделывать при расчете систем с использованием классических методов строительной механики. Поэтому использование МКЭ при расчетах вручную имеет смысл только в учебных целях для лучшего усвоения учащимися процедуры метода.
Сечения всех стержней системы заданы одинаковыми и характеризуется жесткостью на растяжение - сжатие EF=106 КН и жесткостью на изгиб EI=40×106 КН×м2. Как известно, при силовых воздействиях распределение усилий в стержневых системах зависит от распределения жесткостей, а не от их абсолютных величин. Поэтому, для удобства расчетов будем задавать EF=1КН и EI=40 КН×м2. Полученные в результате расчета усилия от этого не изменятся, а полученные в результате расчета перемещения нужно будет уменьшить в 106 раз.
Заменим исходную стержневую систему конечно-элементной моделью, узлы и элементы пронумеруем (рис.32).
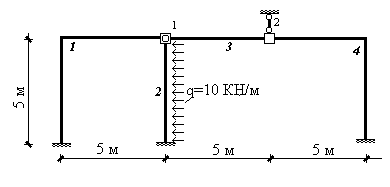 Рис. 32
Рис. 32
|
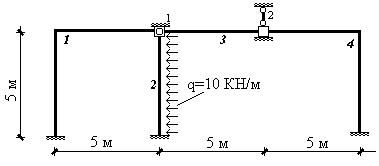 Рис. 33
Рис. 33
|
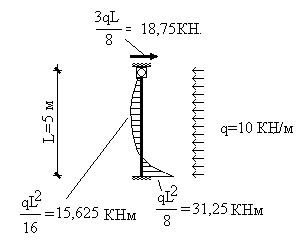 Рис. 34 Рис. 34
|
Перейдем от исходной нагрузки к узловой. Закрепим узлы конечно-элементной схемы от смещений, найдем реакции во введенных связях и построим эпюру изгибающего момента в стержнях системы, т.е. решим задачу 1 (рис.33). Поскольку внешняя нагрузка действует только на элемент 2, достаточно рассмотреть только этот элемент (рис.34). Воспользовавшись табличным решением (табл.11.1), построим эпюру изгибающего момента и определим усилия, действующие со стороны элемента на узел (рис.34). На стержнях остальных элементов эпюра моментов будет отсутствовать. Во введенных связях будет действовать только одна реакция- горизонтальное усилие в узле 1, равное 18,75 КН.
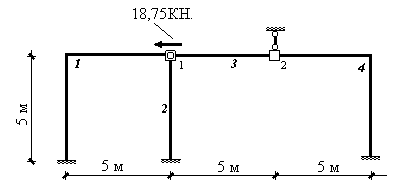 Рис. 35
Рис. 35
|
Перейдем теперь к решению задачи 2. Узловая нагрузка определяется как реакции во введенных связях в задаче 1, взятые с обратным знаком. В нашем случае в качестве нагрузки будет фигурировать только горизонтальное усилие в узле 1 (рис.35). Следовательно, вектор внешней нагрузки Р будет следующим:
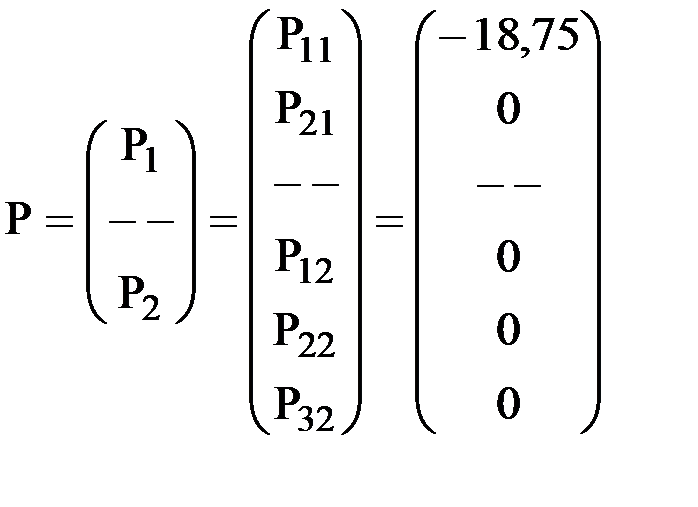 .
.
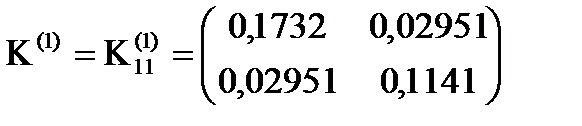
Теперь построим матрицы жесткости всех элементов системы. Вопрос построения матриц жесткости был подробно рассмотрен выше, поэтому здесь приведем только построенные матрицы жесткости в глобальной системе координат[3]:
 ,
, 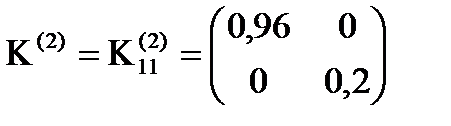 ,
,
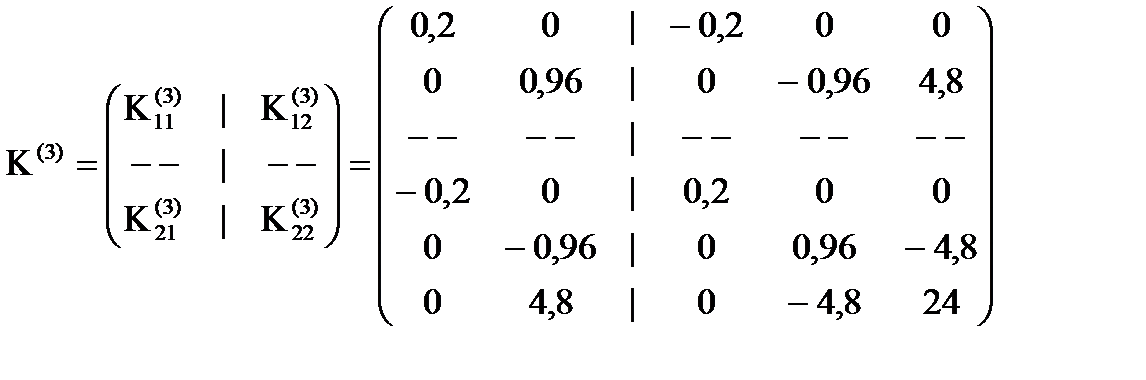 ,
,
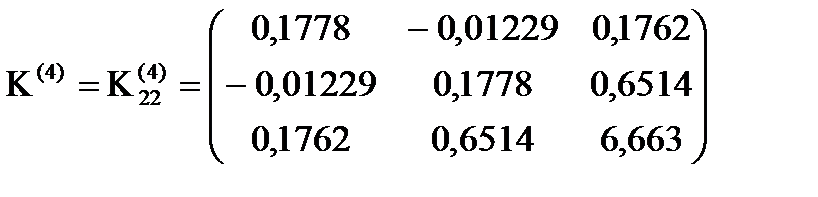 .
.
Следующим шагом является формирование глобальной матрицы жесткости в соответствии с формулой (11):

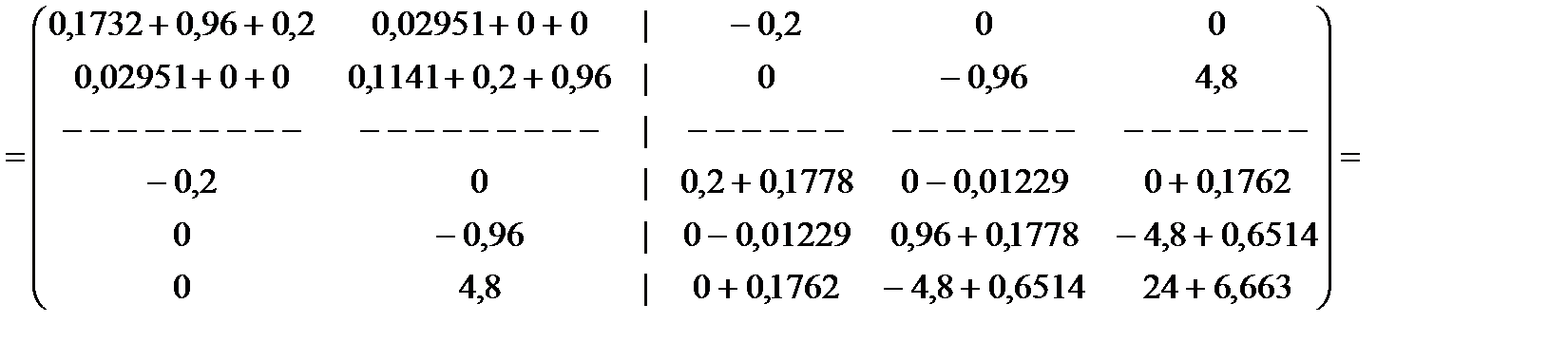
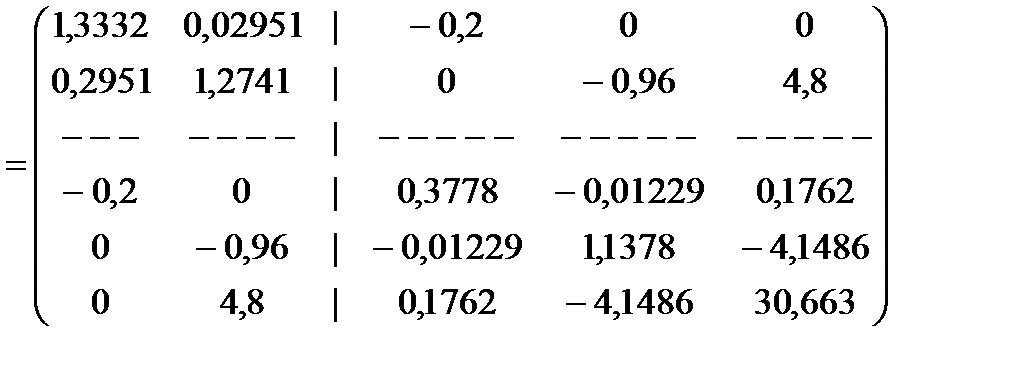 .
.
Составим теперь систему разрешающих уравнений (10) метода конечных элементов:
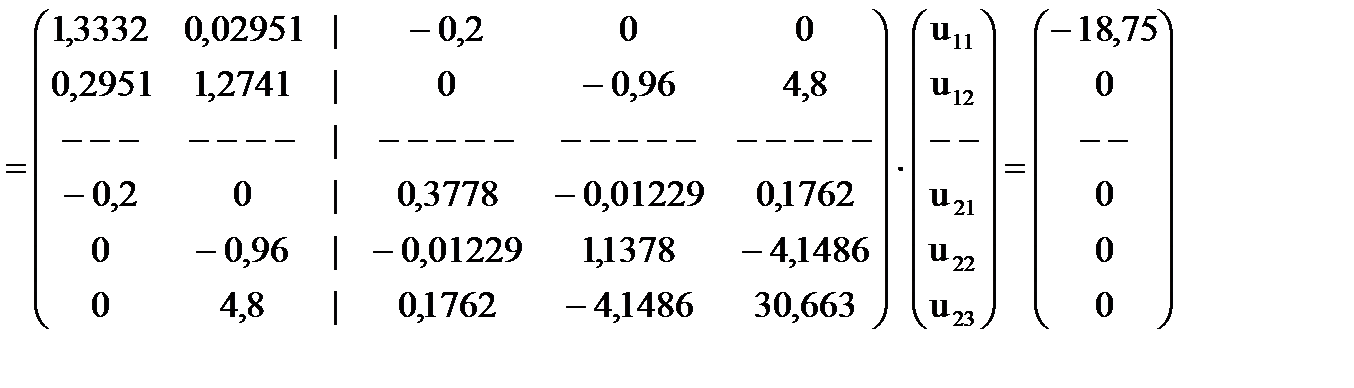 .
.
Поскольку на перемещение узла 2 по направлению 2 наложено ограничение, в эту систему внесем необходимые изменения:
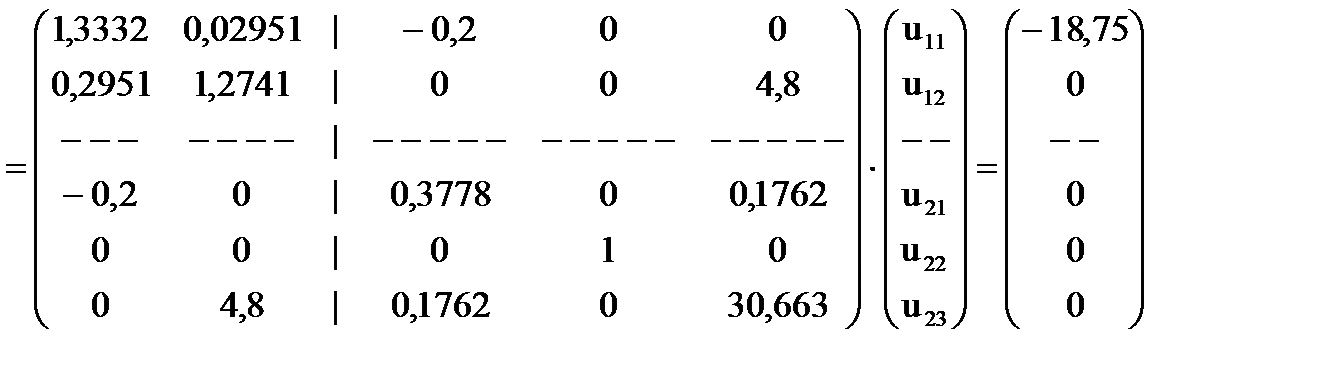 .
.
Решив полученную систему линейных алгебраических уравнений, получим вектор узловых перемещений:
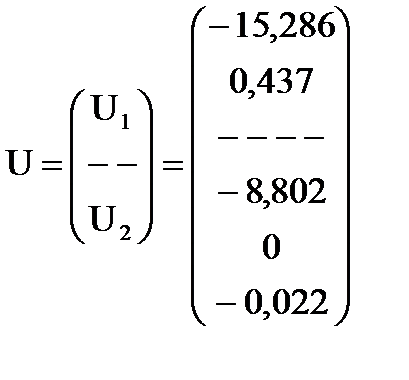 .
.
Напомним, что истинные перемещения в системе будут в 106 раз меньше полученных.
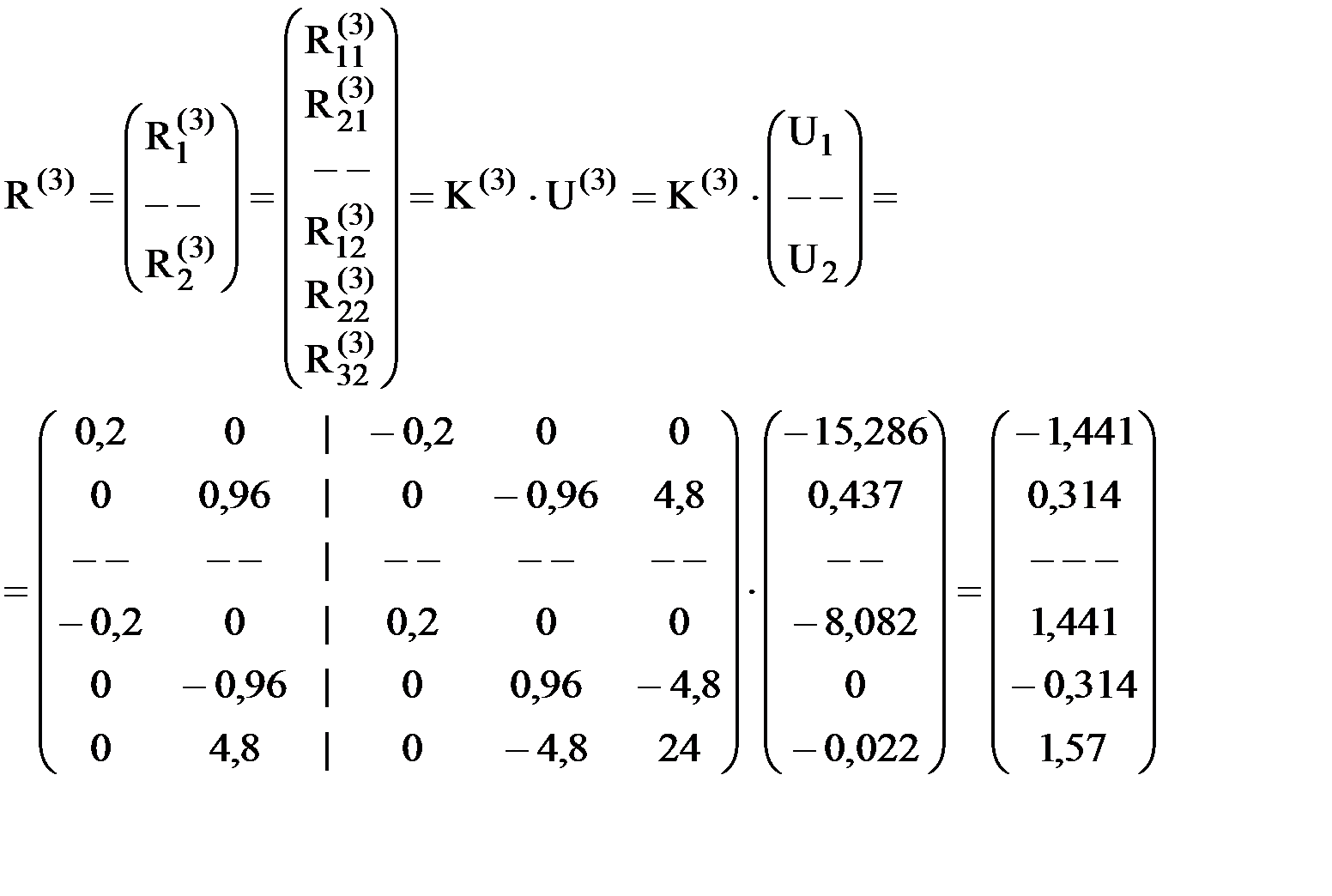
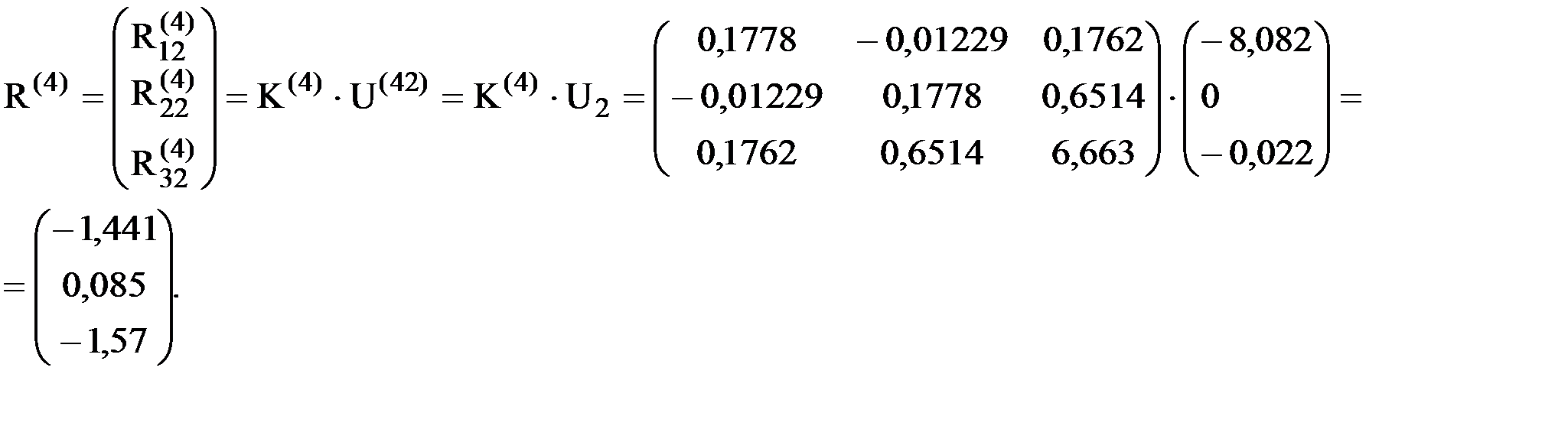
Далее, необходимо определить усилия, действующие на каждый элементы системы со стороны узлов, для чего воспользуемся формулой (2):
 ,
,
 ,
,
Компоненты полученных векторов представляют собой усилия, действующие на узлы элементов. На данном этапе следует выполнить промежуточную проверку равновесия элементов и узлов под действием этих сил и внешней узловой нагрузки (рис.36).
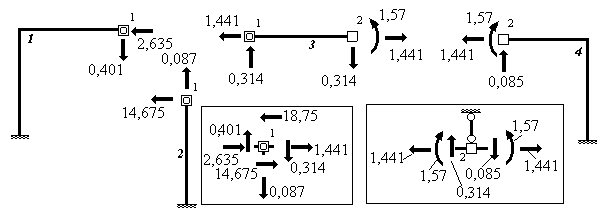 Рис. 36
Рис. 36
|
Теперь, зная приложенные к узлам элементов усилия (рис.36), построить эпюру изгибающих моментов в стержнях системы не составит труда (рис.37).
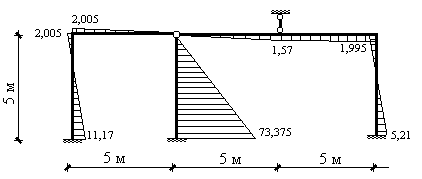 Рис. 37
Рис. 37
|
На этом решение задачи на действие только узловой нагрузки (задачи 2) заканчивается. Для построения окончательной эпюры моментов необходимо сложить решение этой задачи (задачи2) и решение задачи 1 (рис.38).
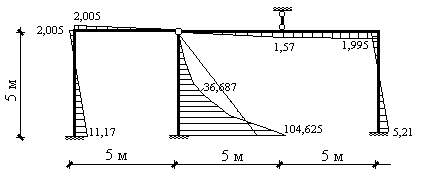 Рис. 38
Рис. 38
|
Далее, как обычно, остается построить эпюры поперечного и продольных усилий, а также выполнить статическую и деформационную проверки.
Дата добавления: 2015-12-16; просмотров: 854;