Общие понятия и определения. Приводом называют энергосиловое устройство, приводящее в движение машину
Приводом называют энергосиловое устройство, приводящее в движение машину. Привод состоит из источника энергии (силовой установки), передаточного устройства (трансмиссии) и системы управления для приведения в действие механизмов машины, а также для их отключения.
Силовой установкой называют комплект, состоящий из двигателя и обслуживающих его устройств. Например, в случае двигателя внутреннего сгорания - топливного бака, устройств для охлаждения, отвода выхлопных газов и т. п.
Трансмиссии могут быть механическими, электрическими, гидравлическими, пневматическими и смешанными. Только в механических и смешанных трансмиссиях на их механических участках механическое движение передается без его преобразования в другие формы энергии. Во всех других случаях вращательное движение выходного вала двигателя силовой установки с помощью электрогенераторов, гидравлических или пневматических насосов преобразуется соответственно в электрическую энергию, энергию движения рабочей жидкости или энергию сжатого воздуха, которая поступает к электро-, гидро- или пневмодвигателям, повторно преобразующим ее в механическое движение. Все указанные двигатели входят в состав трансмиссий. Соответственно различают электрические, гидравлические и пневматические трансмиссии.
Обычно свое наименование привод получает по типу двигателя силовой установки (от карбюраторного двигателя, дизельный), виду используемой энергии внешнего источника (электрический, пневматический) или типу трансмиссии (гидравлический, дизель-электрический и т. п.).
Если на машине установлено нескольких рабочих органов или исполнительных механизмов и все они приводятся в движение от одного двигателя, то привод называют одномоторным или групповым. Если же часть или все рабочие органы, или исполнительные механизмы приводятся от собственных двигателей, то привод называют многомоторным. При индивидуальном приводе исполнительных механизмов трансмиссионные двигатели могут питаться энергией от одного генератора (насоса), индивидуально - каждый двигатель от своего генератора (индивидуальный привод) или по смешанной схеме. В случае использования индивидуального электрического привода каждый электродвигатель, приводящий в движение соответствующий рабочий орган или исполнительный механизм, может питаться непосредственно от электросети. В последнее время на машинах с несколькими рабочими органами или исполнительными механизмами используют преимущественно индивидуальный привод, обладающий более высоким коэффициентом полезного действия (КПД) по сравнению с групповым приводом, простотой и агрегатностью конструкции, лучшей приспособленностью к автоматизации управления, лучшими условиями эксплуатации и ремонта.
При оценке эффективности приводов строительных машин предпочтение следует отдавать тем приводам, которые имеют меньшие габаритные размеры и массу, обладают высокой надежностью и готовностью к работе, высоким КПД, просты в управлении, более приспособлены к автоматизации управления, обеспечивают независимость рабочих движений и возможность их совмещения.
Рассмотрим сущность понятия передачи движения рабочему органу машины в условиях преодоления им внешних сопротивлений. Основная составляющая этих сопротивлений определяется, прежде всего, свойствами преобразуемого материала и характером процесса преобразования. Например, при работе водоотливной насосной установки внешними сопротивлениями будут: сила тяжести поднимаемой воды и силы трения при ее передвижении по трубопроводам. В этом случае сопротивления практически неизменны во времени. При разработке грунта ковшом экскаватора, отвалом бульдозера и другими машинами сопротивления копанию нарастают от минимального до максимального значения, многократно повторяясь в процессе каждой операции копания.
В условиях постоянных или слабо изменяющихся во времени внешних сопротивлений привод работает в спокойном режиме практически с постоянной скоростью на его выходном звене. При меняемых во времени внешних сопротивлениях, кроме внутренних сопротивлений, к ним добавляются динамические составляющие, обусловленные внешней (механической) характеристикой привода - функциональной зависимостью между его силовым и скоростным факторами на выходном звене. Обычно эти факторы связаны между собой обратной зависимостью - чем больше внешнее сопротивление, тем меньше скорость движения выходного звена. Такая зависимость представлена на рис.7 для случая вращательного движения выходного звена привода, где через T, ω и n обозначены соответственно вращающий момент, угловая скорость и частота вращения выходного звена. Если, например, на временном интервале Δt сопротивление возрастает от T1 до T2, то, согласно внешней характеристике привода, угловая скорость снижается за то же время с ω1 до ω2 - выходное звено вращается с замедлением. Согласно второму закону механики этому
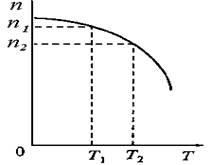 Рис.7. График внешней (механической) характеристики привода
Рис.7. График внешней (механической) характеристики привода
|
замедлению соответствует пропорциональный ему динамический момент противоположного внешнему сопротивлению направления. Складываясь с внешним сопротивлением, динамический момент уменьшает его значение. Природа этого явления заключается в том, что движущаяся система при снижении скорости расходует накопленную в ней энергию на преодоление возрастающих внешних сопротивлений.
С уменьшением внешних сопротивлений скорость ω возрастает, ускорение положительно, а поэтому динамический момент также положителен, т.е. с возрастанием скорости энергия привода расходуется на преодоление внешних сопротивлений и на накопление энергии в движущейся системе. Таким образом, привод как бы выравнивает приведенное к его выходному звену сопротивление с одновременным снижением скорости при возрастании внешнего сопротивления и ее увеличением при снижении последнего. Такая приспособленность привода к условиям его нагружения будет тем больше, чем больше момент инерции вращающихся масс привода и чем меньше первая производная f=dT/dω, называемая жесткостью механической характеристики привода. Характеристики с высокими значениями этой величины называют жесткими, а с низкими значениями - мягкими. Степень жесткости механической характеристики определяется, прежде всего, типом двигателя. Жесткость f может быть понижена за счет включения в состав привода дополнительных устройств.
Для характеристики режимов работы привода отдельных механизмов и машин в целом пользуются отношениями максимальных значений усилий (вращающих моментов) Рмах (Тмах) и скоростей vмах (ωмах) на выходном звене привода к их средним значениям соответственно Рср (Tср) и vср (ωср), продолжительностью включений (ПВ) в процентах от общего времени работы машины и количеством включений КВ в час. В зависимости от степени изменения этих параметров, которые колеблются в пределах Тмах/Тср = 1,1…3,0 (для вращательного движения), ПВ = 15…100 %, КВ = 10... 600, режимы нагружения многих машин и их механизмов условно подразделяют на легкий, средний, тяжелый и весьма тяжелый. Для некоторых машин, например строительных кранов, для определения режимов работы используют также другие дополнительные факторы. Важной характеристикой привода, определяющей его способность преодолевать сопротивления, значительно превышающие их средние значения, является коэффициент перегрузочной способности kпер - отношение максимального момента Тмах по механической характеристике привода к его номинальному значению Тн.
Дата добавления: 2015-11-24; просмотров: 2392;