Примеры решения задач. Пример 1. Материальная точка брошена с начальной скоростью м/с под углом α = 60 ° к горизонту
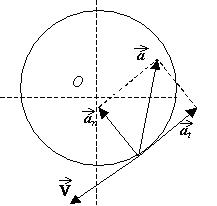
Пример 1. Материальная точка брошена с начальной скоростью  м/с под углом α = 60 ° к горизонту. Найти скорость точки и радиус кривизны траектории в момент времени t1 = 2 c.
м/с под углом α = 60 ° к горизонту. Найти скорость точки и радиус кривизны траектории в момент времени t1 = 2 c.
Решение.Уравнения движения точки:
|

|
 ,
,  ,
,  ,
,  , (1.1)
, (1.1)
|
|





 где проекции начальной скорости на оси координат:
где проекции начальной скорости на оси координат:
|


|





 ,
,  .
.
|

|

 Определим проекции скорости (1.1) точки в момент времени t1=2 c:
Определим проекции скорости (1.1) точки в момент времени t1=2 c:
 ,
,
 .
.
Величина скорости  16,3 м/с.
16,3 м/с.
Нормальное ускорение точки  . Тогда радиус кривизны траектории
. Тогда радиус кривизны траектории  . Определим
. Определим  . Из рис. 1.1 следует
. Из рис. 1.1 следует
 ,
,
где a – угол между полным ускорением и нормальным ускорением. По условию  – ускорение свободного падения. Также из рисунка получаем, что
– ускорение свободного падения. Также из рисунка получаем, что  . Следовательно, радиус кривизны траектории
. Следовательно, радиус кривизны траектории  . Вычислим
. Вычислим  .
.
Ответ:  = 16,3 м/с, R = 29,46 м.
= 16,3 м/с, R = 29,46 м.
Пример 2.Материальная точка движется в соответствии с уравнениями:
x=A+Bt+Ct3, y=Kt+Lt2, (1.2)
где А = 3 м, В = 1 м/с, С = -1 м/с3, K = 1,5 м/с, L = 2 м/с2.
Найти координаты, скорость и ускорениеточки в момент времени t=1 c.
Решение. Координаты точкинайдем, подставив в уравнения движения (1.2) числовые значения коэффициентов А, В, С, K, L ивремени t:
 ,
,  .
.
Проекции мгновенной скорости точки на оси х, y есть первые производные от координат (1.2) по времени:
 ,
,  . (1.3)
. (1.3)
При t = 1 c  ;
;  . Величина скорости
. Величина скорости  м/с.
м/с.
Проекции ускорения точки найдем, взяв первые производные от проекций скорости (1.3) по времени:
 ,
,  . (1.4)
. (1.4)
Величина ускорения точки  .
.
При t = 1 c  м/с2,
м/с2,  м/с2,
м/с2,  м/с2.
м/с2.
Пример 3. Тело вращается вокруг неподвижной оси по закону
j=A+Bt+Ct2, (1.5)
где А = 10 рад, В = 20 рад/с, С = -2 рад/с2. Найти скорость и ускорение точки, находящейся на расстоянии r = 0,1 м от оси вращения, для момента времени t = 4 с. Показать векторы скорости и ускорения на рисунке.
Решение. Скорость точки тела, вращающегося вокруг неподвижной оси, определяется по формуле  , где w – модуль угловой скорости тела. Угловую скорость w найдем, взяв первую производную от угла поворота (1.5) по времени:
, где w – модуль угловой скорости тела. Угловую скорость w найдем, взяв первую производную от угла поворота (1.5) по времени:
 . (1.6)
. (1.6)
В момент времени t = 4 c модуль угловой скорости
 рад/с.
рад/с.
Скорость точки  м/с.
м/с.
Полное ускорение точки, движущейся по кривой линии, может быть найдено как геометрическая сумма тангенциального ускорения  , направленного по касательной к траектории, и нормального ускорения
, направленного по касательной к траектории, и нормального ускорения  , направленного к центру кривизны траектории (рис. 1.2):
, направленного к центру кривизны траектории (рис. 1.2):
 .
.
Так как векторы взаимно перпендикулярны, то модуль ускорения  . (1.7)
. (1.7)
Модули тангенциального и нормального ускорения точки вращающегося тела выражаются формулами:
 ,
,  ,(1.8)
,(1.8)
где e – модуль его углового ускорения.
Подставляя выражения аt и аn в формулу (1.7), находим
 . (1.9)
. (1.9)
Угловое ускорение найдем, взяв первую производную от угловой скорости (1.6) по времени:
 рад/с2.
рад/с2.
Подставляя значения w, e и r в формулу (1.9), получаем

 м/с2.
м/с2.
Вектор касательного ускорения направлен против скорости, т.к. угловое ускорение  .
.
Пример 4.Ящик массой m1 = 20 кг соскальзывает по лотку длиной l = 2 м с коэффициентом трения f=0,1 на неподвижную тележку с песком и застревает в нем. Тележка с песком массой m2 = 80 кг может свободно (без трения) перемещаться по рельсам в горизонтальном направлении. Определить скорость u тележки с ящиком, если лоток наклонен под углом a = 30 ° к рельсам.
Решение. Тележку и ящик можно рассматривать как систему двух неупруго взаимодействующих тел. Но эта система не замкнута, так как на нее действуют внешние силы: силы тяжести G1 = m1g и G2 = m2g и сила реакции N2 (рис. 1.3). Поэтому применить закон сохранения импульса в общем к системе “ящик – тележка” нельзя. Однако, так как проекции указанных сил на направление оси х, совпадающей с направлением рельсов, равны нулю, то проекцию импульса системы на это направление можно считать постоянной, т.е.
| |
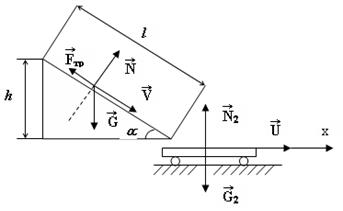
Рис. 1.3
 , (1.10)
, (1.10)
где p1x и p2x – проекции импульса ящика и тележки с песком в момент падения ящика на тележку; p’1x и p’2x – те же величины после падения ящика.
Рассматривая тела системы как материальные точки, выразим в равенстве (1.10) импульсы тел через их массы и скорости, учитывая, что р2x=0 (тележка до взаимодействия с ящиком покоилась), а также что после взаимодействия оба тела системы движутся с одной и той же скоростью и:
 , или
, или  , (1.11)
, (1.11)
где v1 – модуль скорости ящика перед падением на тележку;  – проекция этой скорости на ось х.
– проекция этой скорости на ось х.
Из (1.11) следует  . (1.12)
. (1.12)
Модуль скорости v1 определим из закона сохранения энергии при движении ящика по лотку с учетом силы трения Fтр:
 ,
,
где  ,
,  ,
,  ,
,
 . (1.13)
. (1.13)
Подставив выражение v1 в формулу (1.12),получим
 .
.
Вычисляем скорость тележки:
 м/с.
м/с.
Пример 5. Паром массой m1 и длиной l стоит на неподвижной воде. На его корме находится контейнер массой m2. Затем контейнер был перемещен на носовую часть парома с помощью собственного крана. На какое расстояние s переместится паром относительно дна? Силами трения и сопротивления пренебречь.
|
Рис. 1.4
Решение. Система паром-контейнер относительно горизонтального направления может рассматриваться как замкнутая. Из закона сохранения импульса следует, что внутренние силы замкнутой системы тел не могут изменить положение центра масс системы. Следовательно, при перемещении контейнера центр масс системы т. С не изменит своего положения относительно дна. Координата центра масс xc системы определяется выражением  ,где m – масса системы; mi – массы тел.
,где m – масса системы; mi – массы тел.
Выберем начало системы координат так, чтобы ось Oy проходила в начальный момент через точку C1 – центр масс парома. Обозначим координаты x1 центра масс парома т. C1 и x2 – центра масс контейнера т. C2 – до перемещения (рис. 1.4), x’1, x’2 – после перемещения.
Положение центра масс системы не изменилось, следовательно
 . (1.14)
. (1.14)
Из рисунка следует, что  ,
,  – до перемещения,
– до перемещения,  ,
,  – после перемещения. Получаем из (1.14):
– после перемещения. Получаем из (1.14):
 ,
,  ,
,  – перемещение парома.
– перемещение парома.
Пример 6. При выстреле из пружинного пистолета вертикально вверх пуля массой m = 20 г поднялась на высоту h = 5 м. Определить жесткость k пружины пистолета, если она была сжата на х = 10 см. Массой пружины и силами трения пренебречь.
Решение.Рассмотрим систему пружина – пуля. Так как на тела системы действуют только консервативные силы, то для решения задачи можно применить закон сохранения энергии в механике. Согласно ему, полная механическая энергия Е1 системы в начальном состоянии (в данном случае перед выстрелом) равна полной энергии Е2 в конечном состоянии (когда пуля поднялась на высоту h), т. е.
 ,или
,или  ,(1.15)
,(1.15)
где Т1, Т2, П1 и П2 – кинетические и потенциальные энергии системы в начальном и конечном состояниях. Так как кинетические энергии пули в начальном и конечном состояниях равны нулю, то равенство (1.15) примет вид
 . (1.16)
. (1.16)
Примем потенциальную энергию пули в поле сил тяготения Земли, когда пуля покоится на сжатой пружине, равной нулю, а высоту подъема пули будем отсчитывать от торца сжатой пружины. Тогда энергия системы в начальном состоянии будет равна потенциальной энергии сжатой пружины, т.е.  , а в конечном состоянии – потенциальной энергии пули на высоте h, т.е.
, а в конечном состоянии – потенциальной энергии пули на высоте h, т.е.  .
.
Подставив выражения П1 и П2 в формулу (2), найдем  , откуда
, откуда  . (1.17) Проверим, дает ли полученная формула единицу жесткости k. Для этого в правую часть формулы (1.17) вместо величин подставим их единицы измерения:
. (1.17) Проверим, дает ли полученная формула единицу жесткости k. Для этого в правую часть формулы (1.17) вместо величин подставим их единицы измерения:
 .
.
Убедившись, что полученная единица является единицей жесткости (1 Н/м), подставим в формулу (3) значения величин и произведем вычисления:
 Н/м.
Н/м.
Пример 7. Шар массой m1, движущийся горизонтально с некоторой скоростью v1, столкнулся с неподвижным шаром массой т2. Шары абсолютно упругие, удар прямой, центральный. Какую долю k своей кинетической энергии первый шар передал второму?
Решение. Доля энергии, переданной первым шаром второму, выразится соотношением
 , (1.18)
, (1.18)
где  – кинетическая энергия и скорость первого шара до удара; u2 и T2 – скорость и кинетическая энергия второго шара после удара.
– кинетическая энергия и скорость первого шара до удара; u2 и T2 – скорость и кинетическая энергия второго шара после удара.
Как видно из формулы (1.18), для определения k надо найти  . Согласно условию задачи, импульс системы двух шаров относительно горизонтального направления не изменяется и механическая энергия шаров в другие виды не переходит. Пользуясь этим, найдем:
. Согласно условию задачи, импульс системы двух шаров относительно горизонтального направления не изменяется и механическая энергия шаров в другие виды не переходит. Пользуясь этим, найдем:
 , (1.19)
, (1.19)
 .(1.20)
.(1.20)
Решим совместно уравнения (1.19) и (1.20):
 . (1.21)
. (1.21)
Подставив выражение u2 (1.21) в формулу (1.18) и сократив на v1 и m1, получим
 .
.
Из найденного соотношения видно, что доля переданной энергии зависит только от масс сталкивающихся шаров.
|

Решение. Рассмотрим силы, действующие на каждый груз и на блок в отдельности. На каждый груз действуют сила тяжести и сила упругости (сила натяжения нити). Направим вертикально вниз и напишем для каждого груза уравнение движения (второй закон Ньютона) в проекциях на эту ось. Для первого груза
 , (1.22)
, (1.22)
для второго груза
 . (1.23)
. (1.23)
Под действием моментов сил Т1’ и Т2’ относительно оси z, перпендикулярной плоскости чертежа и направленной за чертеж, блок приобретает угловое ускорение e. Согласно основному уравнению динамики вращательного движения:
 , (1.24)
, (1.24)
где  ;
;  –момент инерции блока (сплошного диска) относительно оси z.
–момент инерции блока (сплошного диска) относительно оси z.
Согласно третьему закону Ньютона, с учетом невесомости нити  ,
,  . Воспользовавшись этим, подставим в уравнение (1.24) вместо Т1’ и Т2’ выражения Т1 и Т2, получив их предварительно из уравнений (1.22) и (1.23):
. Воспользовавшись этим, подставим в уравнение (1.24) вместо Т1’ и Т2’ выражения Т1 и Т2, получив их предварительно из уравнений (1.22) и (1.23):
 .
.
После сокращения на r и перегруппировки членов найдем
 . (1.25)
. (1.25)
Формула (1.25) позволяет массы т1, т2 и т выразить в граммах, как они даны в условии задачи, а ускорение – в единицах СИ. После подстановки числовых значений в формулу (4) получим
 м/с2.
м/с2.
Пример 9. Маховик в виде сплошного диска радиусом R = 0,2 м и массой m = 50 кг раскручен до частоты вращения п1 = 480 мин-1 и предоставлен сам себе. Под действием сил трения маховик остановился через t = 50 с. Найти момент М сил трения.
Решение. Для решения задачи воспользуемся основным уравнением динамики вращательного движения в виде
 , (1.26)
, (1.26)
где dLz – изменение проекции на ось z момента импульса маховика, вращающегося относительно оси z, совпадающей с геометрической осью маховика, за интервал времени dt; Mz – момент внешних сил (в данном случае момент сил трения), действующих на маховик относительно оси z.
Момент сил трения можно считать не изменяющимся с течением времени (  ), поэтому интегрирование уравнения (1.26) приводит к выражению
), поэтому интегрирование уравнения (1.26) приводит к выражению
 . (1.27)
. (1.27)
При вращении твердого тела относительно неподвижной оси изменение проекции момента импульса
 ,(1.28)
,(1.28)
где Jz – момент инерции маховика относительно оси z; Dw – изменение угловой скорости маховика.
Приравняв правые части равенств (1.27) и (1.28), получим  , откуда
, откуда  . (1.29)
. (1.29)
Момент инерции маховика в виде сплошного диска определяется по формуле
. (1.30)
Изменение угловой скорости  выразим через конечную n2 и начальную п1 частоты вращения, пользуясь соотношением
выразим через конечную n2 и начальную п1 частоты вращения, пользуясь соотношением  :
:
 . (1.31)
. (1.31)
Подставив в формулу (1.29) выражения Jz (1.30) и Dw (1.31), получим
 . (1.32)
. (1.32)
Проверим, дает ли расчетная формула единицу момента силы (Н·м). Для этого в правую часть формулы вместо символов величин подставим их единицы:
 .
.
Подставим в (1.32) числовые значения величин и произведем вычисления, учитывая, что n1=480 мин -1  с-1=8 с-1:
с-1=8 с-1:
 .
.
Знак минус показывает, что момент сил трения оказывает на маховик тормозящее действие.
Пример 10.Платформа в виде сплошного диска радиусом R = 1,5 м и массой m1 = 180 кг вращается около вертикальной оси с частотой n = 10 мин-1. В центре платформы стоит человек массой m2 = 60 кг. Какую линейную скорость v относительно пола помещения будет иметь человек, если он перейдет на край платформы?
Решение. Согласно условию задачи, момент внешних сил относительно оси вращения z, совпадающей с геометрической осью платформы, можно считать равным нулю. При этом условии проекция Lz момента импульса системы платформа – человек остается постоянной:
 ,(1.33)
,(1.33)
где Jz – момент инерции платформы с человеком относительно оси z; w – угловая скорость платформы.
Момент инерции системы равен сумме моментов инерции тел, входящих в состав системы, поэтому в начальном состоянии  , а в конечном состоянии
, а в конечном состоянии  .
.
С учетом этого равенство (1.33) примет вид
 ,(1.34)
,(1.34)
где значения моментов инерции J1 и J2 платформы и человека соответственно относятся к начальному состоянию системы; J1’ и J2’ – к конечному.
Момент инерции платформы относительно оси z при переходе человека не изменяется:
 .
.
Момент инерции человека относительно той же оси будет изменяться. Если рассматривать человека как материальную точку, то его момент инерции J2 в начальном состоянии (в центре платформы) можно считать равным нулю. В конечном состоянии (на краю платформы) момент инерции человека  .
.
Подставим в формулу (1.34) выражения моментов инерции, начальной угловой скорости вращения платформы с человеком (w = 2pn) и конечной угловой скорости (w’=  /R, где – скорость человека относительно пола):
/R, где – скорость человека относительно пола):
 . (1.35)
. (1.35)
После сокращения на R2 и простых преобразований находим скорость:
 . (1.36)
. (1.36)
Произведем вычисления:  .
.
Пример 11.Ракета установлена на поверхности Земли и запущена в вертикальном направлении. При какой минимальной скорости v1,сообщенной ракете при запуске, она удалится от поверхности на расстояние, равное радиусу Земли (R=6,37·106 м)? Всеми силами, кроме силы гравитационного взаимодействия ракеты и Земли, пренебречь.
Решение. Со стороны Земли на ракету действует сила тяжести, являющаяся потенциальной силой. При неработающем двигателе под действием потенциальной силы механическая энергия ракеты изменяться не будет. Следовательно,
, (1.37)
где кинетическая и потенциальная энергии ракеты после выключения двигателя в начальном (у поверхности Земли) и конечном (на расстоянии, равном радиусу Земли) состояниях. Согласно определению кинетической энергии,  .
.
Потенциальная энергия ракеты в начальном состоянии  .
.
По мере удаления ракеты от поверхности Земли ее потенциальная энергия возрастает, а кинетическая – убывает. В конечном состоянии кинетическая энергия Т2 станет равной нулю, а потенциальная – достигнет максимального значения:
 . (1.38)
. (1.38)
Подставляя выражения Т1, П1, Т2 и П2 (1.38) в (1.37), получаем
 , (1.39)
, (1.39)
откуда
 .
.
Заметив, что  (g – ускорение свободного падения у поверхности Земли), перепишем эту формулу в виде
(g – ускорение свободного падения у поверхности Земли), перепишем эту формулу в виде
 , (1.40)
, (1.40)
что совпадает с выражением для первой космической скорости.
Произведем вычисления по формуле (1.40):
 .
.
Пример 12. Точка совершает гармонические колебания с частотой
n= 10 Гц. В момент, принятый за начальный, точка имела максимальное смещение  . Написать уравнение колебаний точки и начертить их график.
. Написать уравнение колебаний точки и начертить их график.
Решение. Уравнение колебаний точки можно записать в виде
 , (1.41)
, (1.41)
где А – амплитуда колебаний; w – циклическая частота; t – время; j1 – начальная фаза.
По определению, амплитуда колебаний
A = xmax . (1.42)
Циклическая частота w связана с частотой n соотношением
w = 2pn. (1.43)
Для момента времени t= 0 формула (1.41) примет вид
 ,
,
откуда начальная фаза
 , (1.44)
, (1.44)
или
 ,
,  .
.
Изменение фазы на 2p не изменяет состояния колеблющейся точки, поэтому можно принять
 . (1.45)
. (1.45)
С учетом равенств (1.42), (1.43), (1.44) уравнение колебаний (1.41) примет вид
 или
или  , (1.46)
, (1.46)
где А=1 мм =10-3 м, n=10 Гц, j1=p/2.
График соответствующего гармонического колебания приведен на рис. 1.6.
 |
Рис. 1.6
Пример 13.Частица массой m = 0,01 кг совершает гармонические колебания с периодом Т = 2 с.Полная энергия колеблющейся частицы E = 0,1 мДж. Определить амплитуду А колебаний и наибольшее значение силы Fтах,действующей на частицу.
Решение. Для определения амплитуды колебаний воспользуемся выражением полной энергии частицы:
 , (1.46)
, (1.46)
где  . Отсюда амплитуда
. Отсюда амплитуда
 . (1.47)
. (1.47)
Так как частица совершает гармонические колебания, то сила, действующая на нее, является квазиупругой и, следовательно, может быть выражена соотношением  , где k – коэффициент упругости; х – смещение колеблющейся точки. Максимальной сила будет при максимальном смещении хтах,равном амплитуде:
, где k – коэффициент упругости; х – смещение колеблющейся точки. Максимальной сила будет при максимальном смещении хтах,равном амплитуде:
 . (1.48)
. (1.48)
Коэффициент k выразим через период колебаний:
 . (1.49)
. (1.49)
Подставив выражения (1.47) и (1.49) в (1.48) и произведя упрощения, получим
 . (1.50)
. (1.50)
Произведем вычисления:
 ;
;
 .
.
Пример 14. Складываются два колебания одинакового направления, выраженные уравнениями
 , (1.51)
, (1.51)
где A1 = 3 см, А2 = 2 см,  с,
с,  с, T = 2 с.
с, T = 2 с.
Построить векторную диаграмму сложения этих колебаний и написать уравнение результирующего колебания.
Решение. Для построения векторной диаграммы сложения двух колебаний одного направления надо фиксировать какой-либо момент времени. Обычно векторную диаграмму строят для момента времени t=0. Преобразовав оба уравнения к канонической форме  ,получим из (1.51)
,получим из (1.51)
 . (1.52)
. (1.52)
Отсюда видно, что оба складываемых гармонических колебания имеют одинаковую циклическую частоту  .
.
Начальные фазы первого и второго колебаний соответственно равны  .
.
Произведем вычисления:
 ;
;
 .
.
Изобразим векторы A1 и A2. Для этого отложим отрезки длиной A1 = 3 см и А2 = 2 см под углами j1 = 30 ° и j1 = 60 ° к оси Ох. Результирующее колебание будет происходить с той же частотой w и амплитудой А, равной геометрической сумме амплитуд A1 и A2: A=A1+A2. Согласно теореме косинусов:
|
 . (1.53)
. (1.53)
|
|
|
|
|

|







 Начальную фазу результирующего колебания можно также определить непосредственно из векторной диаграммы (рис. 1.7):
Начальную фазу результирующего колебания можно также определить непосредственно из векторной диаграммы (рис. 1.7):
|
|

|




 .
.
Рис. 1.7
Произведем вычисления согласно (1.53):
 ;
;
 ,
,
или j = 0,735 рад.
Так как результирующее колебание является гармоническим, имеет ту же частоту, что и слагаемые колебания, то его можно записать в виде
, (1.54)
где А = 4,84 см, w = 3,14 с-1, j = 0,735 рад.
Библиографический список
1. Беликов, Б.С. Решение задач по физике. Общие методы: учеб. пособие для студентов вузов / Б.С. Беликов. – М.: Высш. шк., 1986.
2. Бурилова, С.Ю. Основы физических измерений: учеб. пособие / С.Ю. Бурилова, В.М. Машеренков. – Чита: ЧитГТУ, 2002.
3. Верхотуров, А.Р. Электродинамика. Физика колебаний и волн. Квантовая физика: учеб. пособие / А.Р. Верхотуров, В.А. Шамонин. – Чита: ЧитГУ, 2004.
4. Физика: метод. указания и контрольные задания / А.А. Воробьев [и др.]. – М.: Высш. шк., 1987.
5. Кузьмина, Т.В. Электромагнитное поле. Ч. 1: учеб. пособие / Т.В. Кузьмина, И.В. Свешников. – Чита: ЧитГУ, 2004.
6. Новодворская, Е.М. Методика проведения упражнений по физике во втузе: учеб. пособие для студ. втузов / Е.М. Новодворская, Э.М. Дмитриев. – М.: Высш. шк., 1981.
7. Савченко, Н.Д. Физические основы классической механики: учеб. пособие / Н.Д. Савченко. – Чита: ЧитГУ, 2004.
8. Савченко, Н.Д. Методика применения основных законов физики к решению задач по механике: метод. указания / Н.Д. Савченко, С.С. Филимонова. – Чита: ЧитПИ, 1994.
9. Свешников, И.В. Колебания и волны: курс лекций / И.В. Свешников, Г.А. Дзюба. – Чита: ЧитГТУ, 2001.
10. Трофимова, Т.И. Физика. 500 основных законов и формул: справочник для студ. вузов / Т.И. Трофимова. – М.: Высш. шк., 1995.
11. Чертов, А.Г. Задачник по физике / А.Г.Чертов, А.А. Воробьев. – М.: Высш. шк., 1981.
12. Яворский, Б.М. Справочник по физике / Б.М. Яворский, А.А. Детлаф. – М.: Наука, 1977.
Приложение А
Таблица А.1. Физические постоянные
| Физические постоянные | Обозначение | Значение |
| Нормальное ускорение свободного Падения | g | 9,81 м/с2 |
| Гравитационная постоянная | G | 6,67×10-11 м3/(кг с2) |
| Постоянная Авогадро | NA | 6,02×1023 моль-1 |
| Молярная газовая постоянная | R | 8,31 Дж/(моль К) |
| Молярный объем идеального газа при нормальных условиях | Vm | 22,4×10-3 м3/моль |
| Постоянная Больцмана | k | 1,38×10-23 Дж/К |
| Атомная единица массы | а.е.м. | 1,66×10-27 кг |
| Масса электрона | me | 9,11×10-31 кг |
| Масса протона | mp | 1,66×10-27 кг |
Масса  -частицы -частицы
| m | 6,64×10-27 кг |
| Элементарный заряд | e | 1,60×10-19 Кл |
| Электрическая постоянная |   o o
| 8,85×10-12 Ф/м |
Таблица А.2. Астрономические величины
| Наименование | Значение |
| Радиус Земли | 6,37×106 м |
| Радиус Солнца | 6,95×1024 м |
| Радиус Луны | 1,74×106 м |
| Расстояние от центра Земли до центра Солнца | 1,49×1011 м |
| Расстояние от центра Земли до центра Луны | 3,84×108 м |
| Масса Земли | 5,98×1024 кг |
| Масса Солнца | 1,98×1030 кг |
| Масса Луны | 7,33×1022 кг |
Таблица А.3. Плотность твердых тел
| Вещество | Плотность, кг/м3 | Вещество | Плотность, кг/м3 |
| Алюминий | 2,70×103 | Медь | 8,93×103 |
| Барий | 3,50×103 | Никель | 8,90×103 |
| Ванадий | 6,02×103 | Свинец | 11,3×103 |
| Висмут | 9,80×103 | Серебро | 10,5×103 |
| Железо | 7,88×103 | Цезий | 1,90×103 |
| Литий | 0,53×103 | Цинк | 7,15×103 |
Таблица А.4. Плотность жидкостей
| Вещество | Плотность, кг/м3 | Вещество | Плотность, кг/м3 |
| Вода (t = 4 C) | 1,00×103 | Сероуглерод | 1,26×103 |
| Глицерин | 1,26×103 | Скипидар | 0,86×103 |
| Ртуть | 13,6×103 | Спирт | 0,80×103 |
Таблица А.5. Плотность газов (при нормальных условиях)
| Вещество | Плотность, кг/м3 | Вещество | Плотность, кг/м3 |
| Азот | 1,25 | Гелий | 0,18 |
| Водород | 0,09 | Кислород | 1,41 |
| Воздух | 1,29 | Неон | 0,90 |
Таблица А.6. Коэффициент поверхностного натяжения
жидкостей
| Жидкость | Коэффициент, Н/м | Жидкость | Коэффициент, Н/м |
| Вода | 72×10-3 | Ртуть | 500×10-3 |
| Мыльная пена | 40×10-3 | Спирт | 22×10-3 |
Таблица А.7. Эффективный диаметр молекулы
| Газ | Диаметр, м | Газ | Диаметр, м |
| Азот | 3,0×10-10 | Гелий | 1,9×10-10 |
| Аргон | 3,5×10-10 | Кислород | 2,7×10-10 |
| Водород | 2,3×10-10 | Хлор | 3,7×10-10 |
Таблица А.8. Диэлектрическая проницаемость
| Вещество | Проницаемость | Вещество | Проницаемость |
| Вода | 81,0 | Парафин | 2,0 |
| Масло трансформаторное | 2,2 | Стекло | 7,0 |
Таблица А.9. Удельное сопротивление металлов
| Металл | Удельное сопротивление, Ом×м | Металл | Удельное сопротивление, Ом×м |
| Железо | 9,8×10-8 | Нихром | 1,1×10-6 |
| Медь | 1,7×10-8 | Серебро | 1,6×10-8 |
Таблица А.10. Относительные атомные массы Ar и порядковые
номера Z некоторых элементов
| Элемент | Символ | Ar | Z | Элемент | Символ | Ar | Z |
| Азот | N | 14 | 7 | Марганец | Mn | 55 | 25 |
| Алюминий | Al | 27 | 13 | Медь | Cu | 64 | 29 |
| Аргон | Ar | 40 | 18 | Молибден | Mo | 96 | 42 |
| Барий | Ba | 137 | 56 | Натрий | Na | 23 | 11 |
| Ванадий | V | 60 | 23 | Неон | Ne | 20 | 10 |
| Водород | H | 1 | 1 | Никель | Ni | 59 | 28 |
| Вольфрам | W | 184 | 74 | Олово | Sn | 119 | 50 |
| Гелий | He | 4 | 2 | Платина | Pt | 195 | 78 |
| Железо | Fe | 56 | 26 | Ртуть | Hg | 201 | 80 |
| Золото | Au | 197 | 79 | Сера | S | 32 | 16 |
| Калий | K | 39 | 19 | Серебро | Ag | 108 | 47 |
| Кальций | Ca | 40 | 20 | Углерод | C | 12 | 6 |
| Кислород | O | 16 | 8 | Уран | U | 238 | 92 |
| Магний | Mg | 24 | 12 | Хлор | Cl | 35 | 17 |
Таблица А.11. Механические, термодинамические, электрические единицы СИ, имеющие специальные наименования
| Величина | Единица | |||
| Наименование | Размерность | Наименова- ние | Обозна- чение | Выражение через основные и дополни- тельные единицы |
| Основные единицы | ||||
| Длина | L | метр | м | |
| Масса | M | килограмм | кг | |
| Время | T | секунда | с | |
| Сила электрического Тока | I | ампер | А | |
| Термодинамическая температура | 
| кельвин | К | |
| Количество вещества | N | моль | моль | |
| Дополнительные единицы | ||||
| Плоский угол | - | радиан | рад | |
| Телесный угол | - | стерадиан | ср | |
| Производные единицы | ||||
| Частота | T-1 | герц | Гц | с-1 |
| Сила, вес | LMT-2 | ньютон | Н | м×кг× с-2 |
| Давление, механи- ческое напряжение | L-1MT-2 | паскаль | Па | м-1×кг× с-2 |
| Энергия, работа, количество теплоты | L2MT-2 | джоуль | Дж | м2×кг× с-2 |
| Мощность, поток энергии | L2MT-3 | ватт | Вт | м2×кг× с-3 |
| Электрический за- ряд (количество электричества) | TI | кулон | Кл | с×А |
| Электрическое на- пряжение, электри- ческий потенциал, разность электричес- ких потенциалов, электродвижущая сила | L2MT-3I-1 | вольт | В | м2×кг×с-3×А-1 |
| Окончание табл. А.11 | ||||
| Величина | Единица | |||
| Наименование | Размерность | Наименова- ние | Обозна- чение | Выражение через основные и дополни- тельные единицы |
| Электрическая емкость | L-2M-1T4I2 | фарад | Ф | м-2×кг-1×с4×А2 |
| Электрическое сопротивление | L2MT-3I-2 | ом | Ом | м2×кг×с-3×А-2 |
| Электрическая проводимость | L-2M-1T3I2 | сименс | См | м-2×кг-1×с3×А2 |
Таблица А.12. Множители и приставки для образования
десятичных кратных и дольных единиц и их наименования
| Приставка | Множитель | Приставка | Множитель | ||
| Наимено- Вание | Обозна- чение | Наимено- вание | Обозна- чение | ||
| Экса | Э | 1018 | деци | д | 10-1 |
| Пэта | П | 1015 | санти | с | 10-2 |
| Тера | Т | 1012 | милли | м | 10-3 |
| Гига | Г | 109 | микро | мк | 10-6 |
| Мега | М | 106 | нано | н | 10-9 |
| Кило | к | 103 | пико | п | 10-12 |
| Гекто | г | 102 | фемто | ф | 10-15 |
| Дека | да | 101 | атто | а | 10-18 |
Таблица А.13. Греческий алфавит
| Обозначения букв | Название букв | Обозначения
букв
| Название букв |
 , , 
| альфа |  , , 
| Ню |
 , , 
| бета |  , , 
| Кси |
 , , 
| гамма |  , , 
| Омикрон |
| Окончание табл. А.13 | |||
| Обозначения букв | Название букв | Обозначения
букв
| Название букв |
 , , 
| дэльта |  , , 
| Пи |
 , , 
| эпсилон |  , , 
| Ро |
 , , 
| дзета |  , , Дата добавления: 2015-11-04; просмотров: 1342; |
Генерация страницы за: 0.193 сек.