Устройства связи микроЭВМ с объектом управления
Устройства связи с объектом (УСО) соединяют управляемый процесс в объекте непосредственно с центральным процессором управляющей микроЭВМ. В их задачу входит преобразование сигналов управляемого процесса в удобную для микроЭВМ форму, а с другой стороны – преобразование выходных данных процессора в соответствующие сигналы управления объектом.
Из структуры системы связи микроЭВМ с объектом управления (рис. 6.10) видно, что в УСО входят следующие устройства:
передачи сигналов от датчиков (коммутаторы аналоговых и дискретных сигналов, аналого–цифровые преобразователи, устройства приема цифровой информации);
передачи команд управления на исполнительные органы объекта (коммутатор цифровых управляющих сигналов, цифро–аналоговые преобразователи).
Наряду с указанными часто требуются устройства для ручного ввода команд от оператора, а также вывод информации о технологических параметрах процессов на видеотерминал или печатающие устройства. В сложных распределенных микропроцессорных системах в качестве источников или приемников информации могут использоваться другие микроЭВМ, связь между которыми осуществляется при помощи сетевых устройств передачи данных.

|
| Рисунок 6.10 – Схема системы связи микроЭВМ с объектом управления |
Структура системы связи микроЭВМ с объектом управления содержит, как это видно из рисунка 2.10, два интерфейса: стандартный интерфейс ввода–вывода В(внешний интерфейс) и внутренний интерфейс процессора П, обеспечивающий обмен информацией между процессором, ОЗУ и каналом ввода–вывода микроЭВМ. К интерфейсу П подсоединены блок внешних прерываний процессора по сигналам от датчиков МУС и таймер – устройство текущего времени, формирующее сигналы для организации цикла обработки информации и управления объектом.
При осуществлении связи с внешними устройствами в МУС обычно применяют один из трех режимов ввода–вывода:
программно–управляемый (нефорсированный);
по прерыванию (форсированный);
прямой доступ к памяти.
В первом режиме инициирование и управление вводом–выводом осуществляется процессором, а внешние устройства играют пассивную роль и сигнализируют только о своем состоянии, в том числе о готовности к операциям ввода–вывода.
Во втором режиме ввод–вывод инициируется не процессором, а внешними устройствами, генерирующими специальный сигнал прерывания. Реагируя на этот сигнал, процессор переключается на подпрограмму обслуживания устройства, вызывавшего прерывание. Операции, выполняемые этой подпрограммой, определяются разработчиком системы, а непосредственными операциями ввода–вывода управляет процессор.
В режиме прямого доступа к памяти действие процессора приостанавливается. Он отключается от канала и не участвует в передаче данных между основной памятью и быстродействующим внешним устройством.
В общем случае режим ввода–вывода в значительной степени определяется спецификой решаемой задачи. Передача информации может осуществляться отдельными битами (последовательный интерфейс) либо полными словами (параллельный интерфейс). При наличии нескольких внешних устройств необходимо генерировать специальный сигнал выбора, идентифицирующий активное устройство, при этом операции ввода–вывода инициируются только в том случае, если внешнее устройство готово к ним. Управляющие сигналы ввода–вывода от процессора синхронизируются с сигналами генератора тактовых импульсов.
5.8. Ввод–вывод дискретных сигналов
Дискретные сигналы, характеризующие состояние контролируемого объекта, обычно имеют вид уровня напряжения, тока или состояния контактов (замкнуто–разомкнуто). Для сопряжения этих сигналов с микроЭВМ необходимо их преобразовать в стандартные уровни, а именно, нулю должен соответствовать уровень напряжения 0 ¸ 0,4 В, а единице – 2,5 ¸ 5 В. В качестве преобразующих схем используются резисторные делители напряжения, диодные ограничители, компараторы, триггеры Шмитта, согласователи уровней.
Основная функция дискретного вывода – функция ключа. Обычно каждый двоичный разряд выходных цифровых данных имеет самостоятельный смысл, т.е. каждый бит выходного слова может использоваться для управления каким–либо параметром объекта независимо. Выбор типа ключа определяется значением коммутируемой мощности и скорости переключения.
Электромеханические реле применяют в основном для управления сигналами средней и большой мощности при низких скоростях переключения. Они обеспечивают полную гальваническую развязку цепей. Более надежны полупроводниковые ключи.
Для коммутации цепей переменного тока средней и большой мощности часто используют кремниевые управляемые выпрямители. Для гальванической развязки полупроводниковых ключей могут служить опто–электронные пары.
5.9. Ввод – вывод аналоговых сигналов
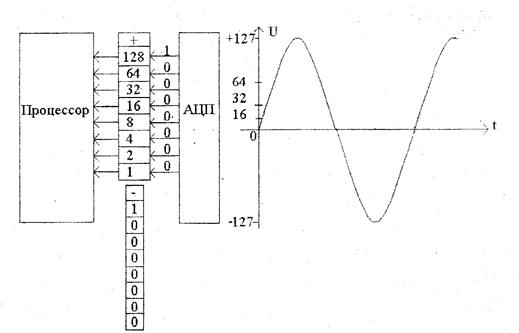
В подсистеме ввода осуществляется преобразование электрических сигналов в цифровую форму. Пример преобразования аналогового сигнала в цифровую форму показан на рис. 2.11
|
| Рисунок 6.11 – Преобразование аналогового сигнала в цифровую форму |
Типовая структура аналогового ввода (см. рис. 2.11) реализуется на основе восьми основных функциональных устройств: датчика, схемы согласования, схемы нормализации, функционального преобразования, АЦП, цифровых мультиплексоров, аналоговых мультиплексоров, устройств управления. Контролируемый параметр (уровень напряжения, ток, давление, температура и т.п.) с помощью соответствующего датчика Д преобразуется в электрический сигнал.
|
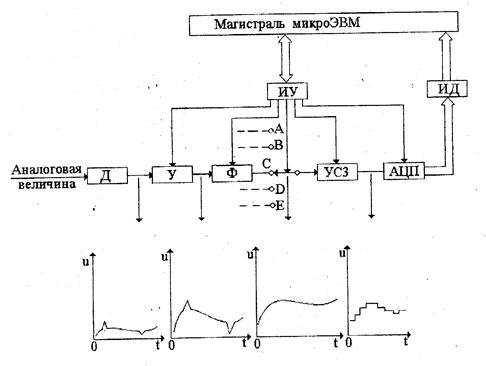
| Рисунок 6.12 – Подсистема аналогового ввода |
Если сигнал на выходе датчика недостаточен для последующей обработки, то он усиливается в усилителе У до необходимого уровня. Далее с помощью активного фильтра Ф из сигнала удаляются нежелательные низко– и высокочастотные составляющие. Отфильтрованный сигнал поступает через аналоговый мультиплексор на устройство слежения–запоминания УСЗ. Применение мультиплексора позволяет в режиме разделения времени использовать единственный АЦП для многих каналов, экономя тем самым дорогостоящее оборудование.
Аналоговая величина всегда преобразуется в цифровую за некоторый конечный промежуток времени, в течение которого сигнал на входе АЦП должен поддерживаться неизменным. Эту функцию выполняет устройство слежения–запоминания УСЗ, сигнал на выходе которого пропорционален сигналу на входе до тех пор, пока не последует команда запоминания, после которой сигнал на выходе остается постоянным в течение промежутка времени, необходимого для преобразования сигнала в цифровую форму. АЦП преобразует уровень напряжения на входе в соответствующее цифровое значение. Далее цифровые данные через интерфейсные схемы сопряжения ИД (интерфейс данных) поступают в общую магистраль микроЭВМ. Управление и синхронизация работы всех устройств тракта аналогового ввода осуществляется микроЭВМ через интерфейсные схемы управления ИУ (интерфейс управления).
Подсистема аналогового вывода используется для подачи на объект контроля тестовых испытательных сигналов в виде напряжений или токов, изменяющихся во времени по заданному закону. Она может быть также применена для вывода из ЭВМ результатов контроля в виде графиков и диаграмм с помощью самописцев и графопостроителей. Это, прежде всего, кривые электрических сигналов (токов и напряжений) системы диагностики аварийных режимов, регистрация электрических сигналов при испытаниях энергетического и электромеханического оборудования и т.п. Преобразование цифровых выходных данных в аналоговый сигнал выполняется с помощью цифро–аналоговых преобразователей (ЦАП), используемых, как правило, в каждом выходном канале.
Лекция 6. СОВРЕМЕННЫЕ СИСТЕМЫ АВТОМАТИЗАЦИИ
СУДОВЫХ ЭЛЕКТРОЭНЕРГЕТИЧЕСКИХ СИСТЕМ
Дата добавления: 2015-11-04; просмотров: 2191;