Распределенные (децентрализованные) МУС
Для сложной судовой техники характерно применение многомашинных и многопроцессорных систем управления распределенной структуры, основанной на функционально–целевой и топологической децентрализации соответствующих судовых систем.
Функционально–целевая децентрализация – это разделение сложного процесса или системы управления на меньшие части по функциональному признаку, например, подсистемы навигации, электронной картографии, освещения обстановки, управления движением и балластировкой судна, средствами энергообеспечения и жизнеобеспечения, и т.п.
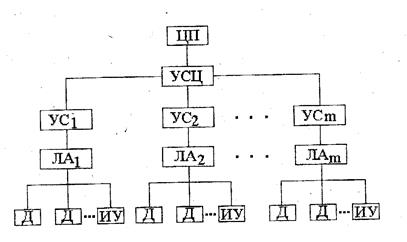
Топологическая децентрализация означает возможность территориального (пространственного) разделения процесса на подпроцессы с целью минимизации суммарной длины линий связи, числа микроЭВМ в узлах связи, объема информационно–измерительной аппаратуры. Распределенные многопроцессорные системы могут иметь радиальную (звездообразную), кольцевую (петлевую), магистральную структуры (рис. 6.7 – 6.9).
|
| Рисунок 6.7 – Радиальная (звездообразная) структура распределенной МУС |
|
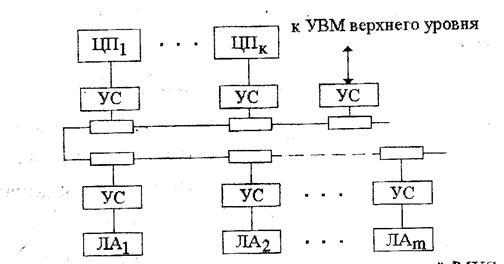
| Рисунок 6.8 – Шинная (магистральная) структура распределенной МУС |
|
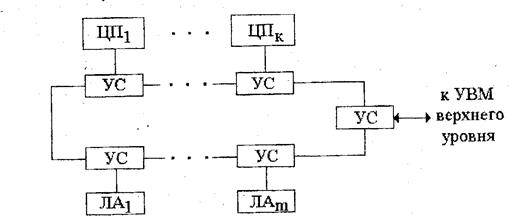
| Рисунок 6.9 – Кольцевая (петлевая) структура распределенной МУС |
Физической средой линий связи (каналов передачи данных) могут быть витая пара проводников, коаксиальный кабель, оптическое волокно.
Чаще всего на судах применяются распределенные МУС магистральной или кольцевой структуры с двойным резервированием линий связи. Такие многопроцессорные, системы представляют собой локальную управляющую вычислительную сеть (ЛУВС), т.к. их микроЭВМ работают в единой операционной среде, являющейся расширением операционных систем микроЭВМ–узлов.
Дата добавления: 2015-11-04; просмотров: 1518;