Общее описание алгоритма функционирования системы управления.
Алгоритм функционирования системы управления хранится в виде программы в постоянном запоминающем устройстве (ПЗУ) контроллера. При включении контроллера (подаче на него питания) программа автоматически переписывается в оперативное запоминающее устройство (ОЗУ) контроллера и запускается. Таким образом, система управления начинает функционировать через 2–3 секунды после подачи на нее питания.
Контроллер выполняет программу циклически, т.е. дойдя до конца программы контроллер организует переход к началу программы и так далее.
Система управления имеет достаточное количество аналоговых и логических входов и выходов и задача управления с точки зрения Системы управления сводится к анализу входных сигналов и выдачи по результатам анализа выходных сигналов–воздействий на элементы СЭЭС и СЭС.
Блок–схема общего алгоритма функционирования системы управления представлена на рис. 6.4. Поясним назначение и принцип функционирования каждого его элемента.
Рисунок 6.4 – Общая блок–схема алгоритма функционирования
системы управления
Р1. Проверяется наличие сигнала «RESET». Этот логический входной сигнал означает, что необходимо осуществить перезапуск системы управления. Он может быть подан нажатием кнопки «RESET» на передней панели системы управления. Если сигнал на входе системы управления не обнаруживается, следующий пункт алгоритма пропускается;
А2. При обнаружении на входе системы сигнала «RESET» производится программный, так называемый горячий рестарт контроллера, при котором происходит сброс (обнуление) всех внутренних логических и числовых переменных, снятие сигналов со всех выходов системы управления. Одним из нежелательных последствий рестарта системы может оказаться то, что после рестарта все ДГ окажутся в режиме ручного управления, а значит, станут недоступными для системы управления;
А3. В блок аналоговой фильтрации входных сигналов поступают числовые значения аналоговых величин (частота судовой сети, частота одного из генераторов, мощность ДГ1 и ДГ2) от аналого–цифровых преобразователей (АЦП), входящих в состав системы. Задача блока — выдать средние за некоторый период времени значения указанных выше величин с целью исключения влияния нерегулярных помех и неравномерности изменения этих величин во времени на систему управления;
А4. Блок анализа состояний ДГ работает только в том случае, когда фиксируется перевод хотя бы одного ДГ из режима ручного в режим автоматического управления (обслуживающий персонал, переводя с поста местного управления ДГ в режим автоматического управления, как бы передает право и ответственность за управление ДГ системе управления): Данный блок позволяет системе управления «подхватить» ДГ, в каком бы состоянии он не находился, таким образом, этот блок дает системе информацию о состоянии ДГ в момент перевода его в режим автоматического управления.
Р5. Следующим шагом определяется, успели ли обновиться данные на выходе блока аналоговой фильтрации с момента последней их обработки. В данной системе используется один многоканальный АЦП, время одного цикла преобразования которого составляет приблизительно 80 мс. Следовательно, при наличии четырех аналоговых каналов (4 величины) все они будут преобразовываться и отфильтровываться не раньше, чем через каждые 320 мс. Если обновления данных еще не произошло, то нет смысла их обрабатывать, и контроллер будет загружен др. задачами;
А6. Если блок аналоговой фильтрации обновил аналоговые входные данные, то программа переходит к их обработке. На этом этапе вычисляются уставки срабатывания электрических защит от перегрузки СЭС, определяется относительная загрузка СЭС в целом и каждого генератора в отдельности, в зависимости от количества запущенных и подключенных к судовой сети генераторов и общей загрузки СЭС, а также обновляются значения внутренних промежуточных величин. Здесь же определяется, превышают ли текущие величины загрузки СЭС уставки перегрузки, недогрузки, защиты первой и второй ступеней, причем определяется не разовое, а длительное превышение или непревышение всех уставок;
А7 Канал выравнивания частоты и мощности, на основе информации о текущей структуре СЭЭС и относительной загрузке СЭС в целом и каждого генератора в отдельности, равномерно распределяет нагрузку между параллельно работающими генераторами, если таковые имеются, и поддерживает частоту сети в пределах допустимых значений;
А8. На этапе анализа логического состояния система управления опрашивает логические входы: кнопки управления, информационные логические сигналы от АВ, ДГ и станции приема питания с берега. На основании полученной информации и состояния внутренних переменных система определяет, не является ли текущее состояние СЭЭС и СЭС аварийным, не требуется ли изменить структуру системы;
А9. Далее, на основе полученной в предыдущем блоке информации, идентифицируется текущее состояние СЭЭС, определяется ее структура и, если требуется, принимаются решения об изменении структуры СЭЭС.
А10. Если в предыдущих блоках было принять решение об изменении структуры СЭЭС, то в данном блоке определяется, какие именно и какого свойства управляющие сигналы нужно выдать. Здесь же реализован алгоритм автоматической точной синхронизации генератора при подключении его к судовой сети;
А11. В последнем блоке алгоритма система управления генерирует определенные в предыдущих блоках управляющие сигналы. По окончании выполнения этого блока алгоритм выполняется сначала.
5.4. Принципы и структуры построения централизованных
и распределенных МУС
Наиболее распространены в промышленной практике и на транспорте три принципа организации управления с применением МУС:
- централизованный с прямым цифровым управлением,
- централизованный с супервизорным режимом использования ЭВМ,
- децентрализованный, или распределенный.
Централизованные МУС
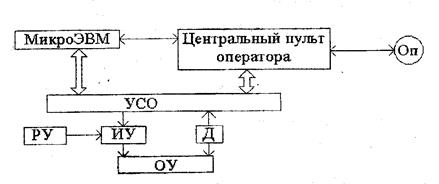
Типовая структура централизованной схемы управления представлена на рис. 2.5. Здесь приняты следующие обозначения:
ЦПО – центральный пульт оператора (включая средства отображения информации и управления работой МУС);
УСО – устройство связи с объектом;
Д– датчик;
РУ – ручное управление;
ИУ – исполнительное устройство.
В информатике такие системы называются системами с непосредственным или прямым цифровым управлением (ПЦУ). Применение микро–ЭВМ в режиме ПЦУ позволяет создавать системы регулирования по отклонению и возмущению, комбинированные системы каскадного и многосвязного регулирования, реализовывать не только оптимизирующие функции, но и адаптацию к изменению внешней среды и переменным параметрам объекта управления. Главный недостаток систем с ПЦУ заключается в неудовлетворительной живучести. При отказе микроЭВМ или УСО объект теряет управление.
|
| Рисунок 6.5 – Типовая структура централизованной МУС с ПЦУ |
Лучшей живучестью обладают централизованные МУС, в которых непосредственное регулирование объектами осуществляют локальные регуляторы, а микроЭВМ выполняет функции «советчика» в так называемом супервизорном режиме (рис. 2.6).
Здесь микроЭВМ вырабатывает значения уставок локальных регуляторов с целью автоматического поддержания процесса вблизи оптимальной рабочей точки. Работа информационно–измерительной части систем супервизорного управления и с прямым цифровым управлением практически не отличаются. Однако выход из строя микроЭВМ и УСО в МУС супервизорного типа не исключает возможность функционирования объекта управления, по крайней мере, не в оптимальном режиме.

|
| Рисунок 6.6 – Типовая структура централизованной МУС с супервизорным режимом использования микроЭВМ |
Централизация систем управления экономически оправдана при небольшой информационной мощности объекта управления и его территориальной сосредоточенности. В противном случае автоматизированное управление процессами обеспечивается с помощью многомашинных и многопроцессорных систем распределенной структуры, базирующейся на функционально–целевой и топологической децентрализации объекта управления.
Дата добавления: 2015-11-04; просмотров: 5958;