Метод мнимостатических характеристик
По данному методу устройство регулирования каждого генератора действует при отклонении частоты и изменении разности между заданной и действительно вырабатываемой генератором мощностью. При этом частота в системе поддерживается постоянной, а нагрузка распределяется по статическим характеристикам, которые смещаются пропорционально некоторой доле общей текущей нагрузки.
Закон регулирования для n генераторов:
 ; ;
 ;
………………………… ;
…………………………
 ; ;
| 
|
где Р1, Р2,….., Рn – фактически вырабатываемая каждым генератором мощность;
 – суммарная нагрузка всех n генераторов;
– суммарная нагрузка всех n генераторов;
α1, α2, …, αn – коэффициенты долевого участия каждого генератора в распределении указанной нагрузки.
По условию сумма коэффициентов долевого участия равна единице, т.е.

Или 100% нагрузке, заданной всем n генераторам.
Процесс регулирования всеми генераторами закончится, когда частота станет нормальной (Df=0) и будет иметь место равенство между действительной и заданной нагрузками, т.е. нагрузка любого генератора будет  .
.
Такое регулирование является астатическим по отношению к частоте и статическим относительно распределения нагрузок между генераторами.
Для компенсации статической ошибки, вызванной нелинейностью характеристик или другими причинами, один из генераторов принимается базовым и должен выполнять регулирование по астатической характеристике. Этот метод нашел широкое применение в промышленных энергосистемах и судовых электроэнергетических системах Его называют методом базового генератора, зачастую он автоматически устанавливается в системах управления СЭЭС по умолчанию.
Данный метод реализован в схеме, представленной на рисунке 1.24.
Из всех, параллельно работающих генераторных агрегатов, выделяется один базовый (G1), который снабжается астатическим регулятором частоты. Все остальные генераторные агрегаты ведомые, они снабжаются статическими регуляторами частоты. В нашей схеме ведомым является генератор G2. Базовый ГА стабилизирует частоту сети, а ведомый ГА равномерно распределяет активную нагрузку между собственным генератором и базовым.
Рисунок 1.24 – Структурная схема системы автоматического
распределения активных нагрузок
Состав схемы.
В1, В2 – датчики активного тока;
В – датчик отклонения частоты;
А1, А2 – усилители;
М1, М2 – серводвигатели приводных двигателей;
ПД1, ПД2 – приводные двигатели ГА;
ТА1,ТА2 – измерительные трансформаторы тока;
ТV1, ТV2 – измерительные трансформаторы напряжения.
Выходы датчиков В1 и В2 подключены последовательно встречно. На вход усилителя А2 подается сигнал рассогласования этих датчиков.
Если нагрузка между генераторами распределена равномерно, то напряжения на выходе датчиков В1 и В2 равны, на вход усилителя А2 сигнал не подается и подача топлива в приводной двигатель G2 стабильна. Если нагрузка генератора G2 увеличилась, то это приведет к увеличению выходного напряжения на В2 и появлению сигнала рассогласования, который подается на вход усилителя А2. Серводвигатель М2 включается и перемещает рейку топливного насоса в сторону уменьшения подачи топлива. Нагрузка перераспределяется, но одновременно уменьшается частота тока в сети. Датчик отклонения частоты В измерит это отклонение и выработает сигнал, который усиливается усилителем А1 и подается на серводвигатель, который перемещает рейку топливного насоса базового генератора в сторону увеличения подачи топлива. Частота стабилизируется. Процесс регулирования завершится, когда частота в сети восстановится.
В тех случаях, когда высокая стабильность частоты не нужна, у ведущего генератора необходимо отключить измерительный орган частоты. Такая система обеспечит статическое регулирование частоты и статическое распределение активных нагрузок.
4.5. Распределение реактивной нагрузки между параллельно
работающими генераторами
При параллельной работе синхронных генераторов должна распределяться пропорционально номинальным мощностям не только активная, но и реактивная нагрузка.
У синхронных генераторов индуктивное сопротивление обмотки статора значительно больше активного сопротивления, в силу чего при наличии разности ЭДС генераторов DЕ возникает уравнительный ток, сдвинутый по фазе относительно DЕ на угол 90°. Уравнительный ток, являясь чисто реактивным оком, практически не влияет на активную мощность, развиваемую генераторами. Он создает только их реактивную нагрузку.
Регулируя возбуждение генераторов, т.е. изменяя их ЭДС, а следовательно, и величину реактивного тока нагрузки, производят перераспределение реактивной мощности между генераторами. Если у одного генератора увеличить возбуждение, а у другого уменьшить при сохранении постоянства напряжения на шинах электростанции, то первый будет набирать реактивную нагрузку, а второй отдавать. Изменение тока возбуждения генераторов осуществляется вручную или автоматически.
При параллельной работе СГ и отсутствии специальных устройств равномерность распределения реактивных нагрузок зависит от наклона внешних характеристик СГ (см. рис. 1.25).
|
| Рисунок 1.25 – Внешние характеристики СГ при распределении реактивных нагрузок |
Для того, чтобы вручную равномерно распределить реактивную нагрузку и в то же время оставить напряжение СГ неизменным, надо увеличить ток возбуждения генератора с меньшим током нагрузки и одновременно уменьшить ток возбуждения у генератора с большим током нагрузки. При этом внешние характеристики СГ переместятся параллельно самим себе. В т. А характеристики 2’ и 1’ пересекутся, а нагрузки генераторов выровняются.
Автоматическое распределение реактивных нагрузок между параллельно работающими генераторами может быть осуществлено двумя способами:
путем введения уравнительных соединений для систем амплитудно–фазового компаундирования, выполненных между ТФК;
применением устройств статизма, при помощи которых в корректор напряжения вводят сигнал, пропорциональный току нагрузки генератора.
Выравнивание реактивных нагрузок путем введения уравнительных соединений для систем амплитудно–фазового компаундирования
Для автоматического распределения реактивной нагрузки между СГ, снабженными системами амплитудно–фазового компаундирования, при одинаковом наклоне (статизме) внешних характеристик применяют уравнительные связи, выполненные одним из трех способов (см. рис. 1.26).
|
| Рисунок 1.26 – Схема распределение реактивной нагрузки |
Для однотипных генераторов с одинаковыми номинальными параметрами цепи возбуждения уравнительную связь устанавливают между обмотками возбуждения, т.е. на стороне постоянного тока (рис. 1.26, уравнительная связь а ). При включении автоматов генераторов QF1 и QF2 замыкаются и их блок–контакты К1 и К2, при этом обмотки возбуждения генераторов соединяются параллельно, поэтому любое изменение напряжения на одной из них автоматически приводит к такому же изменению напряжения на другой. При увеличении нагрузки ток возбуждения генераторов увеличивается на одно и то же значение.
Уравнительные соединения применяют также на стороне переменного тока (рис. 1.26, уравнительная связь б ).
Для СГ разной мощности и с различными напряжениями возбуждения применяют дополнительные обмотки на компаундирующих трансформаторах, соединенные между собой уравнительным проводом (рис. 1.26, уравнительная связь в). Число витков этих обмоток выбирают таким образом, чтобы напряжения на них были одинаковыми при пропорциональном распределении нагрузок между генераторами. Если реактивные нагрузки СГ одинаковы, то в уравнительных проводах, соединяющих эти обмотки, токи не протекают. При изменении реактивной нагрузки одного из генераторов возникающие между обмотками L4 уравнительные токи будут подмагничивать магнитопровод одного из компаундирующих трансформаторов и размагничивать магнитопровод другого, что приведет к выравниванию реактивных нагрузок генераторов.
Выравнивание реактивных нагрузок путем воздействия на корректор напряжения
Из–за разного статизма регуляторных характеристик при параллельной работе генераторов их реактивный ток будет разным.
Каждый синхронный генератор в схеме СВАРН, действующей по отклонению, имеет реактивный компенсатор, который может быть статический и астатический. Т.о. в схему СВАРН вводят дополнительный узел, который состоит из измерительной части и исполнительной. В качестве измерительного элемента, который должен измерять ток нагрузки, применяют измерительный трансформатор тока ТА (см. рис. 1.27). В исполнительной части схемы сигнал, пропорциональный току нагрузки суммируется или вычитается из сигнала, пропорционального истинному напряжению генератора и подается на корректор напряжения.
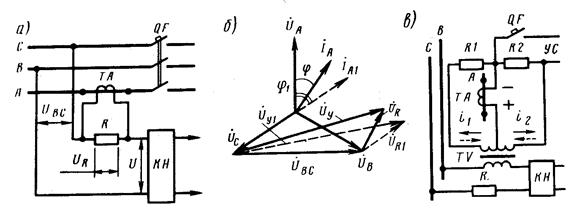
|
| Рисунок 1.27 – Реактивные компенсаторы. Схема статического компенсатора (а), векторная диаграмма (б), схема астатического компенсатора (в). |
Согласно рисунка 1.27,а на корректор напряжения подается напряжение  .
.
При увеличении реактивной нагрузки (см. рис. 1.27 б) угол j увеличивается до значения φ¢ и  увеличится до
увеличится до  .
.
С помощью КН, который выполняет отрицательную обратную связь, ток возбуждения будет уменьшаться, чему соответствует автоматический перевод части реактивной нагрузки на второй генератор.
При астатизме 3 – 4% достигается устойчивое распределение реактивных нагрузок. При меньшем астатизме устойчивость распределения нарушается и тогда применяются уравнительные соединения между обмотками возбуждения синхронных генераторов.
На рисунке 1.27, в изображена схема реактивного астатического компенсатора. В режиме одиночной работы уравнительные связи разомкнуты. Под действием ЭДС трансформатора ТА в контурах текут одинаковые токи i1 и i2, причем по полуобмоткам трансформатора они текут встречно и на вторичной обмотке ТV ЭДС=0.
При параллельной работе и неравномерной нагрузке падение напряжения на R2 генератора G1 не равно падению напряжения на R2 генератора G2. По уравнительным связям потекут уравнительные токи и вызовут дополнительно падение напряжения в контуре.
Если реактивная нагрузка G1 больше G2, то  , следовательно потекут уравнительные токи и вызовут падения напряжения, направленные:
, следовательно потекут уравнительные токи и вызовут падения напряжения, направленные:
- для генератора G1 согласно с ЭДС трансформатора ТА;
- для генератора G2 встречно с ЭДС трансформатора ТА.
Во вторичных обмотках ТV возникнут ЭДС, причем, напряжение управления UУ для генератора G1 – увеличится, а для G2 – уменьшится. В результате произойдет перераспределение нагрузки.
Лекция 5. АВТОМАТИЧЕСКОЕ УПРАВЛЕНИЕ
В СУДОВЫХ ЭЛЕКТРОЭНЕРГЕТИЧЕСКИХ СИСТЕМАХ
5.1. Типовая структурная схема автоматизированной СЭЭС
и ее основные функции
Все современные судовые электростанции проектируются с учётом автоматизации технологических процессов производства электроэнергии. При этом объем автоматизации и принципы построения систем автоматического управления (централизованный, децентрализованный) на судах разных производителей может быть различным. Как правило, все современные СЭС автоматизируются с применением устройств дистанционного управления с использованием специального комплекса унифицированной аппаратуры. При этом средства автоматизации обеспечивают выполнение наиболее характерных для любой судовой электростанции операций.
- пуск и остановку генераторных агрегатов (по команде оператора или автоматически при изменении нагрузки электростанции);
- синхронизацию генераторов и включение их на параллельную работу;
- пропорциональное распределение мощности между параллельно работающими генераторами;
- стабилизацию напряжения и частоты вращения генераторных агрегатов;
- контроль параметров в процессе работы и защиты генераторов и первичных двигателей.
Рисунок 6.1 – Типовая функциональная схема автоматизации СЭС
На рис. 6.1 представлена функциональная схема автоматизации судовой электростанции, отражающая типовой состав оборудования автоматизированной СЭС переменного тока и поясняющая взаимосвязь генераторных агрегатов и автоматических устройств. В данном случае в состав судовой электростанции входят три дизель–генератора и один валогенератор. Всё устанавливаемое оборудование автоматизации разбито по выполняемым функциям: контроля и управления (CONTROL), защиты (PROTECTION), сигнализации и мониторинга (MONITORING).
Функции контроля и управления обеспечиваются устройствами, воздействующими на органы управления первичным двигателем генераторного агрегата и систему самовозбуждения генератора.
В данном случае каждый дизель–генераторный агрегат снабжён датчиком частоты вращения (tacho) и устройством дистанционного автоматического управления первичным двигателем (engine controller), обеспечивающим автоматизацию процессов его пуска и остановки. Каждый генератор снабжён автоматическим регулятором напряжения (AVR).
Для обеспечения параллельной работы синхронных генераторов применяются устройства автоматической синхронизации (synchronizing) и устройства автоматического распределения активной (load sharing) и реактивной (Var loadsharing) нагрузок.
Устройства автоматической синхронизации (synchronizing) обеспечивают автоматическое выполнение условий синхронизации и подключение генераторов к шинам главного распределительного щита посредством дистанционного воздействия на генераторные автоматические выключатели.
Устройства автоматического распределения активной нагрузки (load sharing) воздействуют на регулятор частоты вращения первичного двигателя (governor), изменяя подачу топлива, а устройства автоматического распределения реактивной нагрузки (Var load sharing) воздействуют на автоматический регулятор напряжения (AVR), изменяя ток возбуждения генераторов посредством потенциометра с электроприводом (motor potentiometer).
Защиты генераторов (protection) обеспечивают отключение генераторов от шин в случае короткого замыкания (shirt circuit), перегрузки генераторов по току (over current), обратной мощности (reverse power) и потери возбуждения генератором (excitation loss). В случае срабатывания любой из защит обеспечивается одновременное срабатывание аварийно–предупредительной сигнализации (alarm indication).
Указанные устройства аварийно–предупредительной сигнализации функционально относятся к верхнему уровню системы автоматизации – уровню мониторинга. Функциям мониторинга на современных судах уделяется особое внимание. Современные системы мониторинга обеспечивают не только традиционные звуковую и световую аварийно–предупредительную сигнализацию по определённым параметрам, но и централизованные сбор, обработку информации и прогнозирование технического состояния объекта управления. Для примера на рис. 6.2 приведен один из вариантов построения системы сбора и обработки информации о состоянии технических средств судовой электроэнергетической системы, предлагаемый компанией SELCO. В данном случае в cocтав системы входят устройство управления первичным двигателем дизель–генератора М2000, устройство управления аварийным дизель–генератором М2100, извещатели М1000 (дискретный) и МЗ000 (аналоговый). Извещатели обеспечивают сбор информации с различных датчиков и включение устройств сигнализации. Всего в состав данной системы может входить до 62 локальных устройств управления и контроля, обеспечивающих сбор информации о самых разных параметрах объекта с дискретных и аналоговых датчиков.
|
| Рисунок 6.2 – Структура системы сбора и обработки информации о состоянии объекта управления |
Кроме того, все указанные устройства через последовательный интерфейс RS485 подсоединены к общей двухпроводной шине, посредством которой производится централизованный сбор информации о состоянии объекта управления (в данном случае – судовой, электроэнергетической установки). Входящий в состав системы адаптер М0300 служит для согласования интерфейса RS485 с интерфейсом RS232, через который к системе подключается компьютер, являющийся центром сбора и обработки информации.
Следует отметить, что центр сбора и обработки информации может находиться как на судне, так и на берегу. В первом случае производится прямое подключение адаптера к компьютеру (direct connection), а во втором случае передача информации производится посредством радиопередающих устройств либо по телефонным линиям общего пользования. При этом для осуществления передачи информации о состоянии объекта управления в береговые центры применяются устройства связи, обеспечивающие необходимую достоверность передачи.
Помимо этого, устройства автоматизации СЭС обеспечивают дистанционный контроль основных параметров вырабатываемой электроэнергии: напряжения (voltage monitoring), частоты (frequency monitoring), потребляемой мощности электростанции (power monitoring), отклонений частоты (frequency deviation), контроль сопротивления изоляции сети (insulation monitoring). Для контроля и управления частотой сети используется устройство управления с электронным таймером (master time controller). Контроль текущего значения частоты производится при помощи эталонного кварцевого генератора. При необходимости корректировки частоты устройство одновременно воздействует на все регуляторы частоты генераторных агрегатов (governor) через устройства распределения активной нагрузки (load sharing).
Устройство автоматизации запуска и остановки резервных генераторов (load depending start & stop) позволяет по установкам оператора автоматически включать резервные генераторные агрегаты при существенном возрастании нагрузки или изменении параметров СЭС и отключать их при снижении нагрузки. С целью минимизации времени обесточивания судна в аварийных ситуациях применяется система контроля наличия напряжения на шинах ГРЩ (blackout monitoring), которая обеспечивает подключение к шинам в течение нескольких секунд любого резервного генератора, напряжение которого достигает в данный момент 90% номинального.
Устройство управления загрузкой судовой электростанции (power reference) используется при параллельной работе с береговой сетью с целью управления мощностью, потребляемой судовыми потребителями электроэнергии от береговой сети.
Ниже рассматриваются основные принципы построения систем автоматизации следующих процессов: регулирования напряжения генераторов; регулирования частоты сети; распределения мощности между параллельно работающими генераторами.
Все системы рассматриваются применительно к электростанциям переменного тока, широко применяемым на судах в настоящее время.
Дата добавления: 2015-11-04; просмотров: 3540;