Соединения динамических звеньев
Для упрощения математического описания, сложные автоматические системы обычно разделяют на простейшие звенья, которые могут быть соединены между собой по - разному.
Различают три вида соединения динамических звеньев:
- последовательное;
- параллельное;
- встречно – параллельное
Последовательным называется такое соединение типовых динамических звеньев (см. риc. 15.9), когда выходная величина одного из них является входной величиной для последующего. При этом передаточная функция всей системы определяется уравнением:

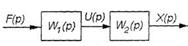
Рисунок 15.9 Последовательное соединение динамических звеньев
При параллельном соединении типовых динамических звеньев (см.рис.15.10) входная величина является общей для всех звеньев, а выходные величины суммируются. Передаточная функция всей системы имеет вид:

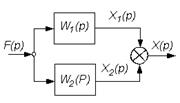
Рисунок 15.10 Параллельное соединение динамических звеньев
При встречно – параллельном соединении типовых динамических звеньев (см.рис.15.11) выходная величина первого звена подается на вход второго, а его выходная величина суммируется с общей входной величиной и подается на вход первого звена. Передаточная функция этого соединения звеньев имеет вид:


Рисунок 15.11 Встречно- параллельное соединение динамических звеньев
где «+» – принимается отрицательная обратная связь;
«-» – при положительной обратной связи
Дата добавления: 2015-10-26; просмотров: 2293;