Физические основы пластической деформации
В основе ОМД лежит процесс пластической деформации, при которой изменяется форма без изменения массы, либо объема (V=const).
Закон наименьшего сопротивления в теории ОМД гласит: при изменении формы тела каждая точка его перемещается в направлении наименьшего сопротивления.
Основное уравнение закона постоянства объема имеет вид
 (1)
(1)
где g - коэффициент деформации по высоте g = h1 /h0 b - коэффициент деформации по ширине b =b1 /b0
l - коэффициент деформации по длине l = l1 /l0.
Первоначальный объем V0 = l0 b0 h0, a деформированный объем V1 = l1 b1 h1
т.к. V0 =V1 , то l0 b0 h0 = l1 b1 h1 Þ l1 /l0*b1/ b0 * h1/ h0 = 1 Þ g b l = 1.
При прокатке b1» b0 (уширениeм можно пренебречь), тогда  и
и 
Скорость деформации и смещенный объем.
Прологарифмируем выражение (1):
|
Смысл (1) и (2) заключается в том, что уменьшение высоты вызывает увеличение по ширине и длине.
Натуральный логарифм коэффициента деформации в каком-либо направлении представляет собой _ удельный смещенный объем Vд/V в этом направлении, а сумма таких удельных объемов по всем направлениям равна нулю.
|
(3)
( e = l) - величина относительной деформации.
в) Краткие сведения из теории пластической деформации твердых тел.
При любом виде нагружения в материале возникают - нормальные (sп) 
и - касательные (st) напряжения:
sn = s0 cos2 a , (4)
st = 0,5 s0 sin2 a .
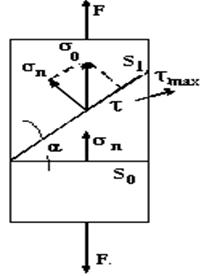
Рис. 18.6. Определение нормальных и касательных напряжений
В сечении S0 (при a = 0) возникают максимальные нормальные напряжения sn max = s = F/S0, а касательные st = 0.
Максимальное касательное напряжение t st max = 0,5 при a =45°.
Плоскости, по которым касательные напряжения не действуют, называются главными плоскостями, а нормальные напряжения, действующие по главным плоскостям, называются главными напряжениями.
Здесь рассмотрен простой случай растяжения в осевом направлении. Однако на практике материал подвергается растяжению или сжатию по двум, трем направлениям, т е находится в сложном напряженном состоянии.
В теории упругости показано, что в каждой точке любого напряженного тела (рис. 18.7) можно провести три взаимно перпендикулярные главные плоскости, через которые передаются три главных нормальных напряжения s1 ³ s2 ³ s3.
В каждой точке напряженного тела можно выделить элементарный кубик, гранями которого служат главные плоскости, по которым действуют три взаимно перпендикулярных главных напряжения. Если материал подвергается одному простому растяжению (или сжатию), то тело находится в линейно - напряженном состоянии, если двум - в плоско - напряженном состоянии, если трем взаимно перпендикулярным деформациям - то в объемно - напряженном состоянии.
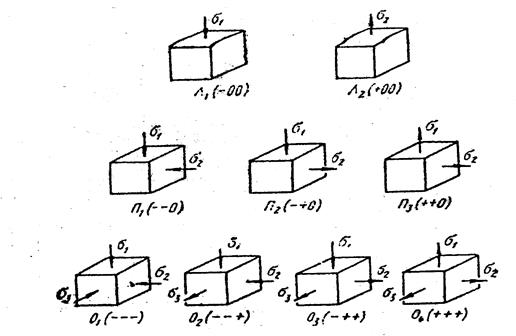 |
Рис. 18.7. Возможные схемы деформации по С.И.Губкину
На рис. 18.7 приведены девять возможных схем напряжения и три основные схемы деформации. С помощью таких схем определяется пластичность металла. Так как число схем деформаций три, а напряжений девять, то одна и та же схема деформаций может быть осуществлена при различных схемах напряженного состояния. Примером схемы ДI служит прокатка узкой полосы, а широкой полосы проходит по схеме ДII. По схеме ДIII протягивается металл через отверстие.
Сопротивление деформации зависит также от температуры и скорости деформации.
Теория предельного состояния устанавливает зависимость между пределом текучести и напряжениями в материале при его пластической деформации. В случае простого линейного растяжения (или сжатия) пластическая деформация начинается при s1 = sтех.
При сложном напряженном состоянии от s2 ¹ 0; s3 ¹ 0 вопрос о величине напряжений, возникающих при пластической деформации, может быть разрешен лишь с помощью теории предельного состояния. Согласно одной из теорий, пластическая деформация наступает, когда разность s1 - s3 = sтех, т.е. выполняется условие пластической деформации.
Однако эта теория не учитывает напряжения s2. Наиболее развита теория Губера. Мизесс и Генки - которая называется энергетической.
Согласно этой теории - пластическая деформация в теле наступает, когда потенциальная энергия упругой деформации, направленной на изменение формы тела, а не объема, достигает определенного значения.
Потенциальная энергия упругой деформации Wn = W0 + WF, где W0, WF - энергии, необходимые для изменения объема и формы.
При объемной деформации полная потенциальная энергия
Wn = (s1 e1 + s2 e2 + s3 e3)/2 (5)
(т.к. Wn = Ee2/2; s =E*e; Wn = (Ee)e/2 = s e/2).
По закону Гука
e1 = [s1 - m ( s2 + s3 )]/ Е (6)
e2 = [s2 - m ( s1 + s3 )]/ Е (7)
e3 = [s3 - m ( s1 + s2 )]/ Е (8)
Подставив (6)-(8) в (5), получим
Wn = [s12 + s22 + s32 -2m( s1s2 + s2s3 + s1s3 )]/ (2Е) (9)
Воспользуемся тем обстоятельством, что приращение объема Vдеф/V при упругой деформации равно сумме деформаций в трех взаимно перпендикулярных направлениях, т.е.
D V/V = e1 + e2 + e3 = 1 - 2m ( s1 + s2 + s3 )/Е (10)
Объемная составляющая W0 потенциальной энергии равна
W0 = 0,5( DV/V)*( s1 + s2 + s3 )/3 (11)
С учетом (10)
W0 = ( s1 + s2 + s3 )2 (1 - 2m )/6Е (12)
Удельная потенциальная энергия WF, направленная на изменение формы тела:
WF = Wn - W0 = [(s1 - s2 )2 + (s2 - s3 )2 + (s3 - s1 )2 ](1 + 2m )/6Е (13)
При линейной деформации ( s2 » 0; s3 » 0; s1 = sТ )
Wфлин = 2sТ2 (1 + m) / 6Е (14)
И следовательно, уравнение пластичности
|
(15)
В предельном случае при s2 = s3 ( либоs2 = s1 ) получим
s1 - s3 = sтек (16)
что совпадает с условием пластичности (в неэнергетической теории).
Если же s2 = (s1 + s3)/2 , получим
s1 - s3 = 1,15sтек (17)
В общем случае, условие пластичности можно выразить уравнением
s1 - s3 = b sтек (18)
где b = 1,0-1,15.
Уравнение пластичности (18) имеет большое значение при определении усилий, требующихся для ОМД.
Дата добавления: 2015-09-18; просмотров: 1352;