Электрический привод.
Электрический привод автомобильных кранов переменного тока напряжением 380 В. В качестве источника электроэнергии для питания электродвигателей механизмов крана применяются синхронные генераторы одной серии ЕСС5 (единая система синхронных генераторов с самовозбуждением ) напряжением 400В.
На кранах КС-4561А (рис 59а) синхронный генератор 7 мощностью 30кВт приводится во вращение от коробки 5 отбора мощности, установленной на корпусе раздаточной коробки 8, через карданный вал 6. Движение к коробке 5 передается от двигателя 1 базового автомобиля через его сцепление 2 , коробку передач 3, карданный вал 4 и раздаточную коробку 8.

На кранах СМК-10 (рис.59б) синхронный генератор мощностью 20-30 кВт установленный на специальной плите на кронштейнах ходовой рамы приводится во вращение от коробки 5 через клиноременную передачу 9. Движение коробке 5 передается от двигателя базового автомобиля через сцепление, коробку передач 3 и карданный вал 4.
Генераторы преобразуют механическую энергию двигателей шасси базовых автомобилей в энергию электрического тока. Электрический ток подводится к силовому шкафу, расположенному на ходой раме крана, а затем – через токосъемник к поворотной раме. Далее через пульт управления и пусковое устройство ток поступает непосредственно к электрическим двигателем исполнительных механизмов. Такой привод называют многомоторным с индивидуальным электроприводом.
Электрическая схема включает в себя различную аппаратуру управления с помощью, которой производят пуск и остановку двигателей, устанавливают необходимые режимы работы, а также контролируют работу всех устройств привода.
Рассмотрим, для примера, принципиальную электрическую схему привода крана КС-4561А (рис.60). Генератор выполнен по схеме самовозбуждения через встроенный блок кремневых выпрямителей. Для автоматического поддержания напряжения, при изменении нагрузки, в комплекте с генератором поставляется стабилизирующее устройство. Процесс самовозбуждения и принцип работы стабилизирующего устройства мы рассматривали в лекции №2.
Перед началом работы переключатель 1, расположенный в кабине базового автомобиля устанавливают в положение соответствующее питанию от генератора, включают автоматический выключатель 29 и подключают питание к специальным переключателям (на схеме не показано) электрооборудования крановой установки. В кабине машинист устанавливает универсальный переключатель «УП» в положение «нормальная работа», а все контроллеры в нулевое положение и возбуждают выключателем 30 генератор.
При нажатии на кнопку К3 электрический ток подается катушкам магнитных пускателей Л и 26, в результате чего замыкаются их блок контакты nn’ пускателя Л шунтируют пусковую кнопку К3, а пускатель «Л» переходит на самопитание. Через главные контакты aa’, bb’, cc’ пускателя Л питание от переключателя 1 подается к контроллерам 10, 12, 13 лебедок подъема грузов, механизма поворота и магнитным пускателем 14 и 15 стреловой лебедки. При замыкании блок - контактов пускателя 26 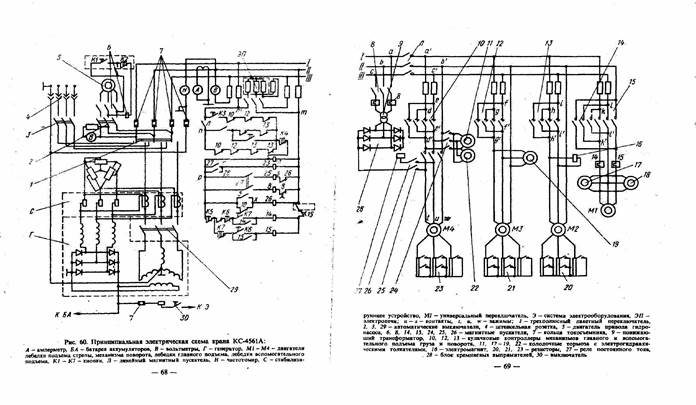 включается магнитный пускатель 24. Электропривод подготовился к работе.
включается магнитный пускатель 24. Электропривод подготовился к работе.
Включением контроллера 10 ,12 или 13 приводятся в движение соответствующие двигатели (например лебедок подъема груза М3, М4 или механизма поворота М2, а нажатием кнопок К7 или К6 – двигатель М1 лебедки подъема стрелы). Грузовые лебедки (главная и вспомогательная) и механизм поворота приводятся в действие асинхронным трехфазным электродвигателем с фазным ротором мощностью соответственно 15; 7,5; 5 квт., а стреловая лебедка – асинхронным короткозамкнутым двигателем мощностью 7,5 кВт. Для включения электродвигателя М3, М4 или М2 рукоятку соответствующего контроллера 10, 12 или 13 переводят в первое положение. При этом замыкаются контакты dd’ и cc’, ff’ и gg’ или hh’ и I i’ в цепи статора соответствующего двигателя и одновременно подается напряжение на двигатели гидравлических толкателей 19, 11 или 22 тормозов грузовых лебедок, а также к электромагниту 16 тормоза механизма поворота, которые растормаживают тормоза своих механизмов.
Для регулирования частоты вращения двигателей грузовых лебедок и механизма поворота в цепи их роторов введены резисторы 20, 21 и 23.
При переводе контроллера в положение второе-пятое сопротивление в цепи ротора соответствующего двигателя будет уменьшаться, а частота его вращения будет расти. Для расширения диапазона регулирования частоты вращения двигателей грузовых лебедок и механизма поворота в схеме предусмотрено частотное регулирование двигателей. Частота тока изменяется в пределах 37,5 до 50 гц, а напряжение от 320 до 400В с помощью изменения частоты вращения генератора в пределах от 750 до 1000 об/мин. Частоту вращения генератора изменяют путем изменения частоты вращения двигателя базового автомобиля.
Опускание тяжелых грузов с малыми скоростями производят в режиме динамического торможения, который соответствует работе двигателя в качестве генератора. Для перевода в режим динамического торможения универсальный переключатель «УП» переводят в положение «Замедленный спуск». В этом случае при нулевом положении рукоятки контроллера 10 включены магнитные пускатели Л, 8, 24 и 26. Пускатель 8 подключает к сети понижающий трансформатор 9 и напряжение подается на выпрямитель 28.
Если перевести ручку контроллера 10 на спуск, то его контакты «рх» разомкнуться, пускатель 26 обесточится блок - контакты «pr» разомкнутся и отключат пускатель 24. В результате этого на зажимах «t» и «u» двигателя М4 через реле 27 постоянного тока будет подано постоянное напряжение от выпрямителя 28 и по статорной обмотке двигателя пойдет постоянный ток. Как только ток достигнет 25А, реле 27 замыкает контакты «pr», включается пускатель 24, получает питание двигатель гидравлического толкателя тормоза, растормаживается лебедка и начинается опускание груза. При этом частоту вращения двигателя регулируют изменением сопротивления в роторной цепи двигателя, переводя рукоятку контроллера 10 в разомкнутое положение на спуск. Скорость опускания груза зависит от массы груза и положения рукоятки контроллера. При переводе контроллера 10 в нулевое положение включается пускатель 26, а пускатель 25 отключается и двигатель останавливается. С этого положения рукоятки контроллера можно производить подъем груза не переключая «УП» в положение «Нормальная работа». Для этого переводят ручку контроллера 10 в положение «Подъем». Чтобы прекратить опускание груза в аварийной ситуации, нажимают кнопку К4 при этом вся пускорегулирующая аппаратура отключается и двигатель останавливается.
Для включения двигателя М1 стреловой лебедки нажимают на кнопку К7 (или К6) управления подъемом (или опусканием) стрелы. При этом включается реверсивные магнитные пускатели 14 и 15, замыкаются контакты КК’ и LL’ в цепи статора двигателя М1 и одновременно подается напряжение на двигатели гидравлических толкателей тормозов 17 и 18, которые растормаживают тормоза лебедки. Частоту вращения двигателя стреловой лебедки регулируют с помощью частотного регулирования. Останавливают двигатель кнопкой К5.
От коротких замыканий и перегрузок электрические машины, питающий кабель и все электрооборудование крана защищается автоматическими выключателями 2,3,29 и предохранителями, установленными в схеме.
Электрическая схема привода предусматривает возможность питания эл. двигателей не от генератора, а от внешнего источника трехфазного тока напряжением 380В и частотой 50Гц. К внешнему источнику питания привод крана присоединяется через штепсельный разъем 4. Для подачи электроэнергии к двигателям механизмов трехполюсный пакетный переключатель 1 устанавливают в положение, соответствующее питанию от внешнего источника тока, отключают автоматический выключатель 29 и включают автоматический выключатель 3. В остальном, все операции те же, что и при работе с генератором.
Электродвигатель 5 привода гидронасоса подключают к сети автоматическим выключателем 2. Пуск и остановку двигателя 5 производят кнопками К1 и К2 управляющими магнитным пускателем 6. Электродвигатели грузовых и стреловых лебедок и механизма поворота преобразуют энергии электрического тока, полученную от генератора или внешнего источника тока, в механическую энергию, передаваемую трансмиссией барабанам, стреле и другим рабочим органам крана.
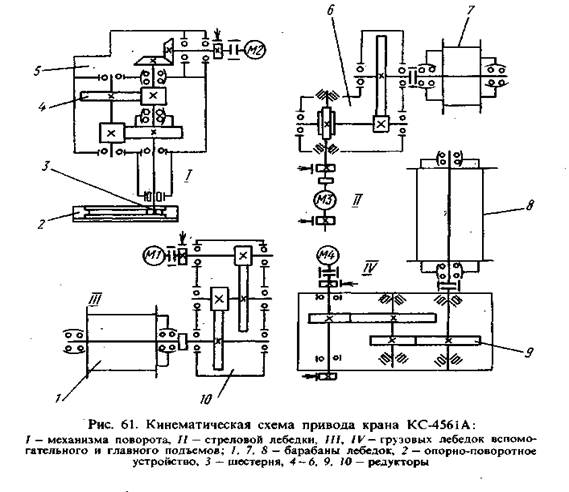
Трансмиссия каждого рабочего органа выполнена в виде отдельных, не зависящих друг от друга механизмов (рис 61).
|
У крана КС-4561А электродвигатель М2 механизма поворота I через одноступенчатый конический 5 и двухступенчатый цилиндрический 4 редукторы передает движение шестерни 3, находящейся в зацеплении с зубчатым венцом опорно-поворотного устройства 2. Электродвигатель М4 грузовой лебедки IV главного подъема передает движение барабану 8 через редуктор 9. Аналогична кинематическая схема привода грузовой лебедки вспомогательного подъема III.
Электродвигатель М3 стреловой лебедки II передает движение барабану 7 через червячно-цилиндрический редуктор 6.
Дата добавления: 2015-08-21; просмотров: 3724;