Механический привод.
Лекция № 4
Схемы приводов.
Вся совокупность механических устройств, входящих в привод кранаих кинематическая взаимосвязь и способ передачи движения от одного устройства другомуизображаются графически в виде кинематических схем.
Вся совокупность устройств входящих в электро- или гидро- привода крана, подключение аппаратуры управления к основному потоку энергии: двигатель внутреннего сгорания –генератор или гидронасос - двигатели – рабочие органы, а также соединения аппаратов между собой изображаются графически в виде электрических и гидравлических схем.
Механический привод.
Одно из важнейших требований, предъявляемых к механическому приводу – обеспечение наименьших потерь на трение при передаче мощности от двигателя базового автомобиля к рабочим органам. Поэтому в механических устройствах приводов широко применяются подшипники качения, а лучшей кинематической схемой считается та, у которой при наименьшем числе элементов (шестерен, валов, звездочек, муфт, тормозов) обеспечиваются необходимое совмещение отдельных операций и требуемой скорости их выполнения.
На всех выпускаемых в настоящее время автомобильных кранах с механическим приводом применены приводы с реверсивно-распределительным механизмом, обеспечивающие независимый привод рабочих органов, возможность демонтажа и замены, даже в полевых условиях, практически любой из сборочных единиц трансмиссии крана без разборки остальных.
Реверсивно-распределительный механизм (рис.58) состоит из распределительного VI и реверсивного V механизмов.
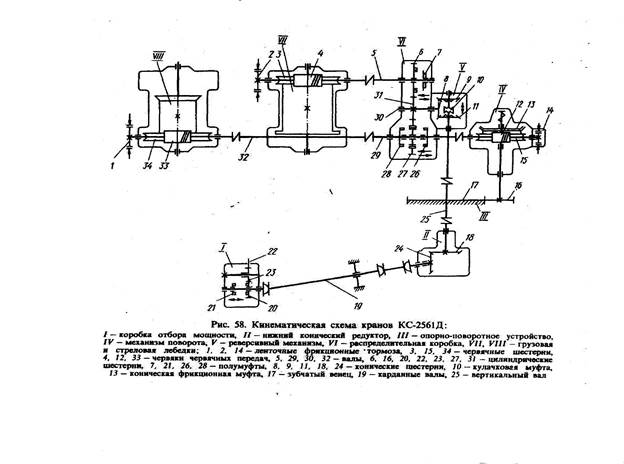
. Механизм приводится в движение от двигателя базового автомобиля через коробку отбора мощности I, шестерня 23 которой находится в постоянном зацеплении с шестерней 22 блока заднего хода коробки передач базового автомобиля. При включении полумуфты 21 (правое крайнее положение) движение от шестеренки 22 через шестеренки 23 и 20 передается карданному валу 19, от него через нижний конический редуктор II вертикальному валу 25 реверсивному механизму V на котором свободно установлены шестерни 11 и 9 и на шлицах кулачковая муфта 10. При введении муфты в зацепление с шестерней 11 или 9 движение в ту или другую сторону передается шестерни 8, насаженной на входной вал 30 распределительной коробки. На валу 30 установлена шестерня 31, которая передает движение лебедкам VII и VIII и механизму поворота IV.
Движение грузовой лебедке VII при включении полумуфты 7 через шестерню 6, вал 5 червячный редуктор 4-3..
Движение стреловой лебедки V111 при включении полумуфты 28 через шестерню 27, валы 29 , 32 и червячный редуктор 33-34.
Механизм поворота получает вращение при включении полумуфты 26 через шестерню 27, червячный редуктор 12-13 и шестерню 16 , которая находится в постоянном зацеплении с зубчатым венцом 17 опорно-поворотного устройства.
На верхней части вертикального вала редуктора механизма поворота IV установлена фрикционная муфта 13 предельного момента, а на входных валах червячных редукторов грузовой и стреловой лебедок и механизма поворота - простые ленточные тормоза 2, 1 и 14.
Описанная кинематическая схема обеспечивает одновременную работу грузовой лебедки либо со стреловой лебедкой (шестерня 27 находится в зацеплении с полумуфтой 28.), либо с механизмом поворота (шестерня 27 находится в зацеплении с полумуфтой 26). При этом реверсирование любого из механизмов вызывает реверсирование второго.
Дата добавления: 2015-08-21; просмотров: 3294;