Активные методы
Активные методы делят на методы прохождения, отражения, комбинированные (использующие как прохождение, так и отражение), импедансный и методы собственных частот.
Методы прохождения используют излучающие и приемные преобразователи, расположенные по разные или по одну сторону контролируемого изделия. Применяют импульсное или (реже) непрерывное излучение и анализируют сигнал, прошедший через контролируемый объект.






















Рис. 3.1. Классификация акустическуих методов контроля.
К методам прохождения относят:
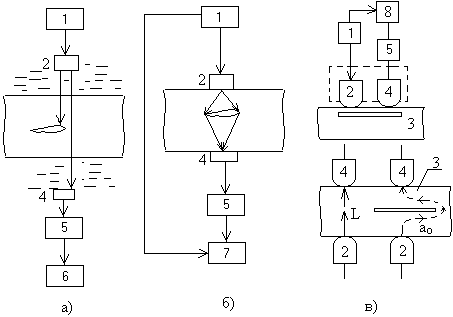
амплитудный теневой метод, основанный на регистрации уменьшения амплитуды волны, прошедшей через контролируемый объект, вследствие наличия в нем дефекта (рис. 3.2,а);
временной теневой метод, базирующийся на регистрации запаздывания импульса, вызванного увеличением его пути в изделии при огибании дефекта (рис. 3.2, б); тип волн при этом не меняется;
велосимметрический метод, основанный на регистрации изменения скорости распространения дисперсионных мод упругих волн в зоне дефекта и применяемый при одностороннем и двустороннем доступе к контролируемому объекту (рис 3.2, в). В этом методе обычно используют преобразователи с сухим точечным контактом. В варианте с одностороннем доступом (рис. 3.2,в верх) скорость возбуждения излучателем антисиметрической волны нулевого порядка (а0) в отделенном дефектом слое меньше, чем в бездефектной зоне. При двустороннем доступе (рис. 3.2,в внизу) в бездефектной зоне энергия передается продольной волной L, в зоне дефекта – волнами а0, которые проходят больший путь и распространяются с меньшими скоростями, чем продольная волна. Дефекты отмечаются по изменению фазы или увеличению времени прохождения (только в импульсном варианте) по контролируемому изделию.
 |
 В методах отражения используют как один, так и два преобразователя; применяют импульсное излучение. К этой подгруппе относят следующие методы дефектоскопии:
В методах отражения используют как один, так и два преобразователя; применяют импульсное излучение. К этой подгруппе относят следующие методы дефектоскопии:
Эхо-метод (рис. 3.3,а) основан на регистрации эхо-сигналов от дефекта. На экране индикатора обычно наблюдают посланный (зондирующий) импульс I, импульс III, отраженный от противоположной поверхности (дна) изделия (донный сигнал) и эхо-сигнал от дефекта II. Время прихода импульсов II и III пропорционально глубине залегания дефекта и толщине изделия, при совмещенной схеме контроля (рис. 3.3,а) один и тот же преобразователь выполняет функции излучателя и приемника. Если эти функции выполняют разные преобразователи, то схему называют раздельной.
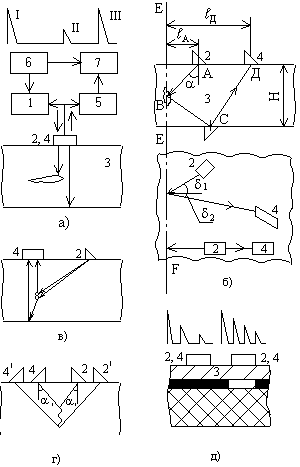 Эхо-зеркальный метод основан на анализе сигналов испытавших зеркальное отражение от донной поверхности изделия и дефекта, т.е. прошедших путь АВСД (рис. 3.3,б). Вариант этого метода, рассчитанный на выявление вертикальных дефектов в плоскости EF, называют методом тандем. Для его реализации при перемещении преобразователей А и Д поддерживают постоянным значения lА+lД = 2Н tg a; для получения зеркального отражения от невертикальных дефектов значения lА+lД варьируют. Один из вариантов метода называемый "косой тандем", предусматривает расположение излучения и приемника не в одной плоскости (рис. 3.3,б вид в плане внизу), а в разных плоскостях, но таким образом, чтобы принимать зеркальное отражение от дефекта. Еще один вариант называемый К-метод, предусматривает расположение преобразователей по разные стороны изделия, например, располагают приемник в точке С.
Эхо-зеркальный метод основан на анализе сигналов испытавших зеркальное отражение от донной поверхности изделия и дефекта, т.е. прошедших путь АВСД (рис. 3.3,б). Вариант этого метода, рассчитанный на выявление вертикальных дефектов в плоскости EF, называют методом тандем. Для его реализации при перемещении преобразователей А и Д поддерживают постоянным значения lА+lД = 2Н tg a; для получения зеркального отражения от невертикальных дефектов значения lА+lД варьируют. Один из вариантов метода называемый "косой тандем", предусматривает расположение излучения и приемника не в одной плоскости (рис. 3.3,б вид в плане внизу), а в разных плоскостях, но таким образом, чтобы принимать зеркальное отражение от дефекта. Еще один вариант называемый К-метод, предусматривает расположение преобразователей по разные стороны изделия, например, располагают приемник в точке С.
Дельта- метод (рис. 3.3,в) основан на приеме преобразователем для продольных волн 4, расположенным над дефектом рассеянных на дефекте волн, излученных преобразователем для поперечных волн 2.
Дифракционно-временной метод (рис. 3.3,г), в котором излучатели 2 и 2', приемники 4 и 4' излучают и принимают либо продольные, либо поперечные волны, причем могут излучать и принимать разные типы волн. Преобразователь располагают так, чтобы получать максимумы эхо-сигналов волн дифрагированных на концах дефекта. Измеряют амплитуды и время прихода сигналов от верхнего и нижнего концов дефекта.
Реверберационный метод (рис. 3.3,д) использует влияние дефекта на время затухания многократно отраженных ультразвуковых импульсов в контролируемом объекте. Например, при контроле клееной конструкции с наружным металлическим слоем и внутренним полимерным слоем дефект соединения препятствует передаче энергии во внутренний слой, что увеличивает время затухания многократных эхо-сигналов во внешнем слое. Отражения импульсов в полимерном слое обычно отсутствуют вследствие большого затухания ультразвука в полимере.
 |
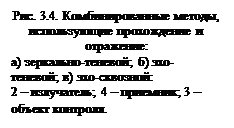
В комбинированных методах используют принцип, как прохождения, так и отражения акустических волн.
Зеркально-теневой метод основан на измерении амплитуды донного сигнала. На рис. 3.4,а отраженный луч условно смещен в сторону. По технике выполнения (фиксирует эхо-сигнал) его относят к методам отражения, а по физической сущности контроля (измеряют ослабление сигнала дважды прошедшего изделие в зоне дефекта) он близок к теневому методу.
Эхо-теневой метод основан на анализе как прошедших, так и отраженных волн (рис. 3.4,б).
В эхо сквозном методе фиксируют сквозной сигнал I, сигнал II, испытавший двукратное отражение в изделии, а в случае появления полупрозрачного дефекта – также сигнал III и IV, соответствующие отражениям волн от дефекта и испытавшие также отражение от верхней и нижней поверхностей изделия. Большой непрозрачный дефект обнаруживают по исчезновению или сильному уменьшению сигнала I, т.е. теневым методом, так же сигнала II. Полупрозрачные или небольшие дефекты обнаруживают по появлению сигналов III и IV, которые являются главными информационными сигналами.
Методы собственных частот основан на измерении этих частот (или спектров) колебаний контролируемых объектов. Собственные частоты измеряют при возбуждении в изделиях как вынужденных, так и свободных колебаний. Свободные колебания обычно возбуждают механическим ударом, вынужденные – воздействием гармонической силы меняющейся частоты.
Различают интегральные и локальные методы. В интегральных методах анализируют собственные частоты изделия колеблющегося как единое целое, в локальных – колебания отдельных его участков.
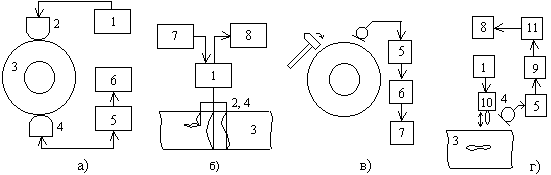 |
Методы собственных частот, использующие вынужденные колебания. В интегральном методе генератор 1 (рис. 3.5,а) регулируемой частоты соединен с излучателем 2, возбуждающим упругие колебания (обычно продольные или изгибные) в контролируемом изделии 3. Приемник 4 преобразует принятые колебания в электрический сигнал, который усиливается усилителем 5 и поступает на индикатор резонанса 6. Регулируя частоту генератора 1, измеряют собственные частоты изделия 3. Диапазон применяемых частот до 500 кГц.
|
Локальный метод с использованием вынужденных колебаний известен как ультразвуковой резонансный метод. Его применяют в основном для измерения толщин. В стенке изделия 3 (рис. 3.5,б) с помощью преобразователей 2, 4 возбуждают упругие волны (обычно продольные) непрерывно меняющиеся частоты. Фиксируют частоты, на которых отмечаются резонансы системы преобразователь – изделие. По резонансным частотам определяют толщину стенки изделия и наличие в нем дефектов. Дефекты, параллельные поверхности, меняют измеряемую толщину, а расположенные под углом к поверхности – приводят к исчезновению резонансов. Диапазон применяемых частот – до нескольких мегагерц.
Методы собственных частот, использующие свободные колебания, так же делят на интегральные и локальные.
В интегральном методе в изделие 3 (рис. 3.5,а) ударом молотка 1 возбуждают свободно-затухающие колебания. Эти колебания принимают микрофоном 4, усиливают усилителем 5 и фильтруют полосовым фильтром 6, пропускающим только сигналы с частотами, соответствующими выбранной моде колебаний. Частоту измеряют частотомером 7. признаком дефекта служит изменение (обычное снижение) частоты. Как правило, используют основные собственные частоты, не превышающие 15 кГц.
В локальном методе (рис. 3.5,г) возбуждаемый генератором 1 вибратор 10, создает периодические удары по контролируемому изделию. Электрические сигналы с приемного микрофона 4 через усилитель 5 поступают на спектроанализатор 9. Выделенный последним спектр принятого сигнала обрабатывается решающим устройством 11, результат обработки появляется на индикаторе 12. Кроме микрофонов, применяются пьезоприемники. Дефекты регистрируют по изменению спектра принятого импульсного сигнала. В отличие от интегрального метода контроль выполняется путем сканирования изделий. Обычный диапазон рабочих частот 0,3 до 20 кГц.
Акустико-топографический метод имеет признаки интегрального и локального методов. Он основан на возбуждении в изделии интенсивных изгибов колебаний непрерывно меняющейся частоты и регистрации распределения амплитуд колебаний с помощью наносимого на поверхность порошка. Упругие колебания возбуждают преобразователем, прижимаемым к сухому изделию. Преобразователь питают от мощного (порядка 0,4 кВт) генератора непрерывно меняющейся частоты. Если собственная частота отделенной дефектом (расслоением, нарушением соединения) зоны попадает в диапазон возбуждаемых частот, колебания этой зоны усиливаются, покрывающий ее порошок смещается и концентрируется по границам дефектов, делая их видимыми. Диапазон используемых частот – от 40 до 150 кГц.
Импедансные методы используют зависимость импедансов изделий при их упругих колебаниях от параметров этих изделий и наличия в них дефектов. Обычно оценивают механический импеданс Z=Ě/ύ, где Ě и ύ – комплексные амплитуды возмущающей силы и колебательной скорости, соответственно. В отличие от характеристического импеданса rс, являющегося параметром среды, механический импеданс характеризует конструкцию. В импедансных методах используют изгибные и продольные волны.
При использовании изгибных волн преобразователь стрежневого типа (рис. 3.6,а) содержит соединенный с генератором 1 излучающий 2 и приемный 4 пьезоэлементы. Через сухой точечный контакт преобразователь возбуждает в изделии 3 гармонические изгибные колебания. В зоне дефекта соединения модуль ½Z½механического импеданса  уменьшается и меняется его аргумент j. Эти изменения регистрируются электронной аппаратурой. В импульсном варианте этого метода в системе преобразователь – изделие возбуждают импульсы свободно затухающих колебаний. Признаком дефекта служит уменьшение амплитуды и несущей частоты этих колебаний.
уменьшается и меняется его аргумент j. Эти изменения регистрируются электронной аппаратурой. В импульсном варианте этого метода в системе преобразователь – изделие возбуждают импульсы свободно затухающих колебаний. Признаком дефекта служит уменьшение амплитуды и несущей частоты этих колебаний.
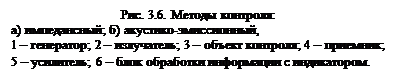
 Кроме совмещенного преобразователя применяют раздельно-совмещенные преобразователи, имеющие в общем корпусе раздельные излучающий и приемный вибраторы. Эти преобразователи работают в импульсном режиме. При работе совмещенными преобразователями используют частоты до 8 кГц, раздельно-совмещенными – импульсы с несущими частотами 15-35 кГц.
Кроме совмещенного преобразователя применяют раздельно-совмещенные преобразователи, имеющие в общем корпусе раздельные излучающий и приемный вибраторы. Эти преобразователи работают в импульсном режиме. При работе совмещенными преобразователями используют частоты до 8 кГц, раздельно-совмещенными – импульсы с несущими частотами 15-35 кГц.
В другом варианте в контролируемой многослойной конструкции с помощью плоского пьезопреобразователя возбуждают продольные упругие волны фиксированной частоты. Дефекты регистрируют по изменению входного электрического импеданса Z, пьезопреобразователя. Импеданс Z, определяется входным акустическим импедансом контролируемой конструкции, зависящим от наличия и глубины залегания дефектов соединения между ее элементами. Изменения Z, представляют в виде точки на комплексной плоскости, положение которой зависит от характера дефекта. В отличие от методов, использующих изгибные волны, преобразователь контактирует с изделием через слой контактной смазки.
Метод контактного импеданса, применяемый для контроля твердости, основан на оценке механического импеданса зоны контакта алмазного индикатора стержневого преобразователя, прижимаемого к контролируемому объекту с постоянной силой. Уменьшение твердости увеличивает площадь контактной зоны, вызывая рост ее упругого механического импеданса, что отмечается по увеличению собственной частоты продольного колеблющегося преобразователя, однозначно связанной с измеряемой твердостью.
Дата добавления: 2015-08-14; просмотров: 2082;