ЭКСПЕРИМЕНТАЛЬНЫЕ МЕТОДЫ ПОСТРОЕНИЯ МАТЕМАТИЧЕСКОЙ МОДЕЛИ
В практике синтеза автоматических СУ технологическими процессами сельскохозяйственного производства используют два метода экспериментального определения (идентификации) статических и динамических характеристик объектов автоматизации — активный и пассивный.
В первом случае испытательное воздействие стандартной формы задают искусственно, во втором — объект исследуют путем сопоставления выходных и входных величин в условиях нормальной эксплуатации объекта.
Выбор метода идентификации объекта определяется поставленной задачей, условиями опытов, эксплуатационными возмущениями и допустимыми по технологическим требованиям отклонениями исследуемых величин. Логика выбора метода будет рассмотрена далее.
Определение статических характеристик (активный метод).Уравнения статики описывают поведение объекта в установившемся состоянии, т. е. показывают взаимосвязи между входными x(t) и выходными у(t) координатами, когда все производные функций х(t) и у(t) равны нулю.
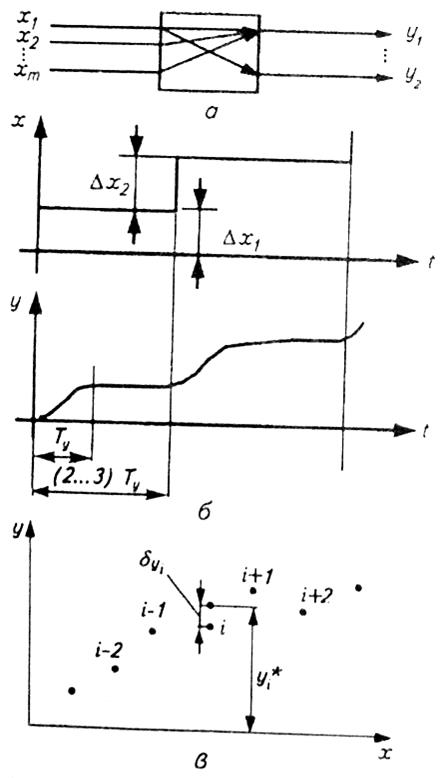
Рис. 3.2. Активный эксперимент по определению статических характеристик:
а — схема связей между входными и выходными параметрами; б — график эксперимента; в — к методу четвертых разностей
В общем виде статическая характеристика объекта с твходами (рис. 3.2, а) имеет вид
Рассмотрим процедуру определения статических характеристик объекта поэтапно.
1. Подготовка и планирование эксперимента. Изучают ТП, оборудование и устанавливают взаимные связи между выходными и входными параметрами.
2. Проведение эксперимента. Каждая входная величина изменяется ступенчато в пределах рабочего диапазона  и спустя (2...3)Ty, гдеTу — длительность процесса фиксируют значение выходной величины у (рис. 3.2, б).
и спустя (2...3)Ty, гдеTу — длительность процесса фиксируют значение выходной величины у (рис. 3.2, б).
Так, для определения статических характеристик зимней теплицы с водяным обогревом устанавливают соотношения между расходом воды через регулирующий клапан и температурой воздуха в средней точке теплицы. При этом температуру измеряют после стабилизации температурного режима сооружения. Общее число опытов
 ,
,
где xmax, xmin — верхняя и нижняя границы диапазона изменения входной величины; — величина входного воздействия.
Практически рекомендуемое число опытов d= 6... 10. Опыт повторяют по каждому из каналов исследования.
3. Обработка результатов эксперимента. Полученные зависимости  могут быть искажены помехой и потому подлежат сглаживанию одним из известных методов (обычно скользящего среднего или четвертых разностей).
могут быть искажены помехой и потому подлежат сглаживанию одним из известных методов (обычно скользящего среднего или четвертых разностей).
Идея метода четвертых разностей (рис. 3.2, в) состоит в последовательном вычислении поправки для каждой экспериментальной точки 1 последовательно. Эту поправку вычисляют по формуле:

в которую входят ордината i-й точки и ординаты четырех соседних с ней точек  ,
,  ,
,  ,
,  .
.
Истинное значение

Полученная статическая характеристика, как правило, нелинейна и потому желательна ее линеаризация одним из рассмотренных ранее методов с целью аппроксимации простейшей зависимостью вида  .
.
При двух входных воздействиях х1 и х2 вид аппроксимирующего выражения усложняется:

Определение статических характеристик (пассивный метод).Стохастические (случайные) изменения выходных величин нормально Функционирующего объекта автоматизации обусловлены как случайными изменениями входных величин, так и процессами, происходящими в самом объекте, причем последующие значения случайно изменяющихся физических величин точно предсказать невозможно.
В рассмотренном ранее примере с теплицей такого рода случайно изменяющимися воздействиями являются изменения наружной температуры, солнечной радиации или давления воды в питающей тепловой сети. С математической точки зрения такие воздействия и процессы, ими вызываемые, рассматривают как случайные функции (СФ) времени. Значение их статических характеристик позволяет определить динамические характеристики объекта автоматизации и успешно решить задачу синтеза САР. При этом обычно достаточно использования теории СФ, характеристиками случайного процесса (СП) которой служат математическое ожидание (МО) и корреляционная функция (КФ).
Математическое ожидание СП х(t) в момент времени  (рис. 3.3, о) есть среднее арифметическое значение для N реализаций СП:
(рис. 3.3, о) есть среднее арифметическое значение для N реализаций СП:
где i — номер реализации.
Математическое ожидание СП — детерминированная величина. Случайный процесс x(t), МО которого равно нулю, называют центрированным,  .
.
Дисперсия характеризует интенсивность отклонения СП от МО. Ее определяют как среднее значение квадрата колебаний центрированного СП:
Дисперсия СП в момент ti —детерминированная величина. Она всегда положительна.
Вместо дисперсии часто используют среднее квадратическое отклонение СФ

Рис. 3.3. График случайного процесса (а) и автокорреляционной функции (б)
Автокорреляционная функция характеризует связь между значениями СП в разные моменты времени и 

Случайные процессы могут быть стационарные и нестационарные. К группе нестационарных относятся СП, МО и КФ, которые зависят от времени, т. е. от точки отсчета.
Автокорреляционная функция Rxx(т) стационарного СП зависит только от интервала сдвига (т) и не зависит от момента отсчета (рис. 3.3, б).
Многие СП обладают свойством эргодичности, которое состоит в том, что характеристики процессов, вычисленные по множеству реализаций при фиксированном времени и усреднением по времени одной реализации длиной Т, совпадают.
Для СП, обладающих свойством эргодичности,
 .
.
Если интервал реализации Т разделить на N дискретных интервалов времени  (шаг дискретизации), то оценка центрированной КФ
(шаг дискретизации), то оценка центрированной КФ
 .
.
Спектральная плотность характеризует частотные свойства СП (среднее значение квадрата амплитуды гармоник)
 .
.
Первое из выражений для вычисления спектральной плотности связано с предварительной аппроксимацией КФ каким-либо аналитическим выражением с последующим использованием табличных интегралов. При использовании ЭВМ предпочтительно вычисление  и
и  методами численного эксперимента.
методами численного эксперимента.
Кроме расчетных методов для получения спектральных плотностей может быть использован специальный частотный анализатор.
Спектральная плотность — четная функция частоты, причем медленно меняющиеся (низкочастотные) процессы имеют более узкий график спектральной плотности, чем быстро меняющиеся (высокочастотные) процессы.
Определение динамических характеристик.Динамические характеристики объекта автоматизации могут быть представлены в виде амплитудной фазочастотной характеристики (АФЧХ), определяемой по формуле:
 ,
,
где и  — спектральная плотность входного сигнала и взаимная спектральная плотность входного и выходного сигналов.
— спектральная плотность входного сигнала и взаимная спектральная плотность входного и выходного сигналов.
Если входной сигнал объекта — «белый шум», то расчетная формула упрощается, ибо его спектральная плотность величина постоянная и равна а.

По этим формулам строят АФЧХ объекта при изменении  от 0 до
от 0 до  .
.
Подводя итоги, можно предложить следующие рекомендации по выбору метода построения модели объекта.
1. Аналитический метод дает модель, применимую для всего класса однотипных объектов, позволяющую оценить влияние конструктивно-технологических параметров объекта на его статические и динамические характеристики.
Недостаток метода — невысокая точность, поскольку его использование требует существенных упрощений задачи.
2. Экспериментальный метод дает модель, отличающуюся большой точностью и значительно меньшими трудозатратами.
Недостатки метода — невозможность применить модель для другого объекта и оценить влияние отдельных конструктивно-технологических параметров на характеристики объекта.
Пассивный эксперимент применим при высоком уровне возмущающих воздействий и в случае невозможности организовать требуемое детерминированное воздействие. В остальных случаях активный эксперимент предпочтительнее.
Перспективен экспериментально-аналитический метод. В этом случае уравнения статики и динамики составляются аналитическими методами, а коэффициенты этих уравнений находят экспериментально на реально существующих объектах.
Критерий адекватности модели и объекта — близость результата численного решения дифференциального уравнения и экспериментальной переходной характеристики.
Дата добавления: 2015-07-14; просмотров: 3525;