ХАРАКТЕРИСТИКА И КЛАССИФИКАЦИЯ АВТОМАТИЧЕСКИХ СИСТЕМ УПРАВЛЕНИЯ
Целью управления ТП может быть: стабилизация некоторой физической величины, изменение ее по заданной программе или, в более сложных случаях, оптимизация некоторого обобщающего критерия: наибольшая производительность процесса наименьшая себестоимость продукта и т. д.
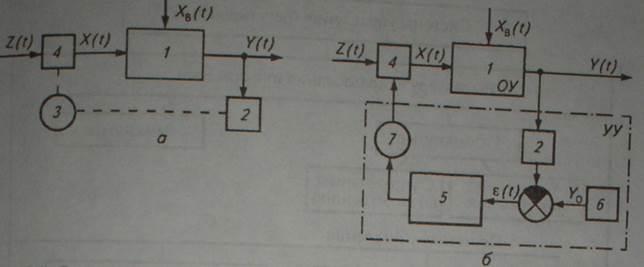
Рис. 1.1. Структурные схемы систем ручного (а) и автоматического (б) управления:
1 - объект управления; 2 - измерительный прибор; 3- оператор; 4 - регулирующий орган; 5 - управляющий элемент; 6- задатчик; 7- исполнительный механизм.
В самом простом случае (рис. 1.1, а) управление ТП осуществляется оператором 3, который на основании своего опыта и ориентируясь по показаниям контрольно-измерительных приборов 2 оценивает ход процесса по выходным параметрам У(t) и принимает меры воздействия Х(t) с целью устранения влияния внешних возмущений Хв(t), действующих на объект управления 1. Естественно, результаты ТП в этом случае зависят от квалификации и добросовестности оператора.
Структурные схемы автоматических СУ представляют в виде цепочки элементов, каждый из которых подвержен действию одного или нескольких входных воздействий, в результате чего изменяются выходные параметры этого элемента.
Обычно элементы обладают детектирующими свойствами, когда выходные величины не влияют на входные. Но возможны также случаи, когда выходные параметры воздействуют на входные. Это имеет место в том случае, когда элемент охвачен обратной связью или если такова физическая сущность протекающих в объекте процессов.
Структурные схемы автоматических СУ (рис. 1.1, б) в простейшем случае включают в себя два элемента: объект 1 управления (совместно с регулирующим органом 4) и управляющее устройство УУ (на рисунке обведено пунктиром). В схему УУ входят измерительный преобразователь (датчик) 2, измеряющий регулируемую величину и преобразующий ее в определенный сигнал определенной физической природы (электрической, механической и др.); задатчик 6; управляющий элемент 5, усиливающий и преобразующий отклонение Управляемой величины У(t) от заданного значения Уо всоответствии с заложенным в него алгоритмом; исполнительный механизм 7, выполняющий команду управляющего элемента 5 по изменению положения регулирующего органа 4, осуществляющего управление расходом вещества или энергии в ОУ.
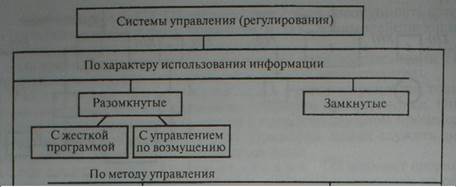
Рис. 1.2. Классификация автоматических систем управления (регулирования)
На вход управляющего элемента (регулятора) 5 подается сигнал, по значению равный разности e(t) текущего значения управляемой величины Y(t) и ее заданного значения Уо. Управляемая величина Y(t) находится под действием одного или нескольких возмущающих воздействий Хв(t), часть которых может контролироваться.
Классификация автоматических СУ возможна по различным признакам, например так, как это показано на рисунке 1.2.
Первый из признаков — назначение информации, в соответствии с которым автоматические СУ делят на замкнутые и разомкнутые
Замкнутые системы используют текущую информацию о выходных величинах, определяют отклонение е(t) управляемой величины Y(t) от ее заданного значения Ко и принимают действия к уменьшению или полному исключению е(t). Простейшим примером замкнутой системы, называемой системой регулирования по отклонению, служит показанная на рисунке 1.3, а система стабилизации уровня воды в баке. Система состоит из измерительного преобразователя (датчика) 2 уровня, устройства 1 управления (регулятора) и исполнительного механизма 3, управляющего положением регулирующего органа (клапана) 5.
Признак замкнутой системы, действующей на отклонение регулируемой величины, — обратная связь с выхода ОУ на его вход. Замкнутые системы этого типа компенсируют любые возмущения, поскольку регулятор контролирует только отклонение регулируемой величины независимо от причины, его вызвавшей. Они не могут обеспечить равенство выходной величины Y(t) заданному значению Yo в течение всего времени t управления, так как их принцип работы связан с наличием отклонения е = Y(t) — Уо.
Разомкнутые автоматические СУ подразделяют на системы с жесткой программой и с управлением по возмущению. Пример систем первого типа — система автоматического пуска и остановки комплекса машин, входящих в технологическую линию, в которой должна выдерживаться определенная последовательность (программа) работы отдельных механизмов, при этом ОС с выхода объекта на его вход отсутствует.
В разомкнутых автоматических СУ, действующих по возмущению, управление осуществляется на основании информации о входных (возмущающих) воздействиях. В показанной на рисунке 1.3, б системе таким возмущением является изменение давления воды в подающем трубопроводе.
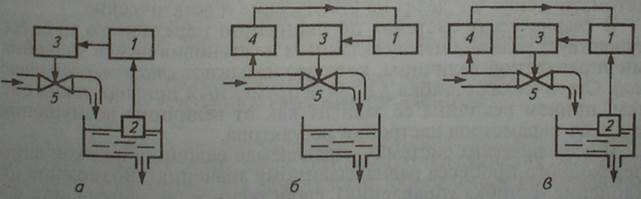
Рис. 1.3. Функциональные схемы автоматических СУ с управлением по отклонению (я), по возмущению (б) и комбинированные (в):
1 - регулятор; 2 и 4 — измерительные преобразователи уровня и давления воды; 3 - исполнительный механизм; 5 - регулирующий орган
В реальных системах возможна компенсация одного или нескольких поддающихся измерению возмущений. Если таких возмущений несколько, то для компенсации каждого из них необходим свой контур регулирования. При этом всегда останется часть возмущений в том числе случайных и неконтролируемых, которые могут вызвать отклонение регулируемой величины Y(tl) от заданной Уо.
Выход из этого — сочетание обоих принципов управления (по возмущению и отклонению). Такую систему называют комбинированной (рис. 1.3, в), и ее преимущество по сравнению с системой, действующей по отклонению, в лучшей стабилизации регулируемой величины.
Стабилизирующие системы поддерживают управляемую величину на заданном уровне, программные — изменяют управляемую величину по заданной программе и следящие — обеспечивают измерение управляемой величины в определенном соотношении к задающему воздействию. В защищенном грунте пример стабилизирующей СУ— система регулирования температуры грунта, программной СУ — система управления температурой в зависимости от времени суток, следящей СУ —то же, но в зависимости от уровня естественной освещенности.
По методу управления автоматические СУ подразделяют на приспосабливающиеся (адаптивные) и неприспосабливающиеся к изменяющимся условиям работы ОУ.
Приспосабливающиеся, или адаптивные, автоматические СУ целенаправленно изменяют алгоритмы управления или параметры управляющих воздействий для достижения наилучшего управления объектом. Поскольку в процессе работы таких систем происходит изменение их алгоритмов и (или) структуры, то их называют также самонастраивающимися. Частный случай приспосабливающихся систем — экстремальные, задача которых — автоматический поиск максимума или минимума управляемой величины.
Следующий признак классификации связан с результатом работы системы в установившемся состоянии. В соответствии с ним автоматические СУ делят на статические и астатические.
В статических системах по окончании переходного процесса существует разница между заданным и установившимся значениями управляемой величины, которую называют статической ошибкой. Статическая ошибка  — непременный признак таких систем, причем величина ее зависит как от величины возмущения, так и от параметров настройки регулятора.
— непременный признак таких систем, причем величина ее зависит как от величины возмущения, так и от параметров настройки регулятора.
В астатических системах управляемая величина по окончании переходного процесса равна заданному значению. Возможное отклонение (ошибка управления), свойственное реальным системам автоматики, обусловлено несовершенством ее элементов.
По характеру изменения управляющих воздействий во времени автоматические СУ делят на непрерывные и прерывистые, или дискретные.
В непрерывных системах управляемая величина и управляющее воздействие — непрерывные функции времени.
Прерывистые автоматические СУ подразделяют на релейные, импульсные и цифровые.
В релейных (позиционных) системах один из элементов, обычно это управляющее устройство (УУ), имеет существенно нелинейную (релейную) характеристику, в соответствии с которой управляющее воздействие изменяется скачкообразно при определенном значении управляемой величины. Такова, к примеру, система управления водонагревателем, в которой регулятор температуры включает электронагреватель при снижении температуры воды до определяемого настройкой регулятора значения.
Импульсные автоматические СУ имеют в своем составе звено, преобразующее управляемую величину в дискретную импульсную. При этом управляемой величине пропорциональна амплитуда или длительность импульсов.
В цифровых системах формирование управляющих воздействий осуществляется цифровыми вычислительными устройствами, которые оперируют не с непрерывными сигналами, а с дискретными числовыми последовательностями.
Следующий признак классификации — число управляемых величин. В соответствии с этим признаком автоматические СУ делят на одномерные и многомерные. Одномерные имеют по одной входной и выходной величине, а многомерные — по нескольку.
По виду дифференциального уравнения автоматические СУ подразделяют на линейные и нелинейные. К линейным относят системы, поведение которых описывается линейными дифференциальными уравнениями. Поскольку систем, абсолютно точно описываемых линейными дифференциальными уравнениями, практически не существует, сюда относят также линеаризованные системы, описываемые линейными дифференциальными уравнениями приближенно, при некоторых допущениях и ограничениях. К нелинейным относят системы, поведение которых описывается нелинейными дифференциальными уравнениями, причем в системе достаточно иметь всего один нелинейный элемент, чтобы вся она стала нелинейной.
Дата добавления: 2015-07-14; просмотров: 3636;