ОБЩИЙ ПОДХОД К АВТОМАТИЗАЦИИ ТЕХНОЛОГИЧЕСКИХ ПРОЦЕССОВ
В общем случае система управления сельскохозяйственным производством строится путем последовательного объединения систем управления отдельными ТП при условии обеспечения максимальной универсальности систем, надежности и рационального использования новейших методов построения автоматических систем и технических средств. Такая поэтапная автоматизация позволяет получить наибольший эффект от внедрения автоматических устройств при минимальных затратах, связанных с автоматизацией важнейших звеньев ТП.
Выполнение этой задачи требует расчленения общей задачи управления по иерархическому принципу, определяющему порядок взаимодействия отдельных частей управляющей системы.
На нижней ступени располагают локальные системы автоматического управления и взаимосвязанные типовые ТП, соответствующие простейшим технологическим операциям и типовому оборудованию Технические решения по автоматизации таких 1П обычно являются типовыми. Задачи таких систем автоматического управления — обеспечение эффективности управления и надежности работы технологического оборудования.
В состав технических средств локальных систем автоматики входят:
автоматические устройства с априорной или текущей информацией о возмущении, действующие по разомкнутой цепи преобразования сигнала в управляющее воздействие на ОУ;
автоматические регуляторы, обеспечивающие стабилизацию заданного значения регулируемой величины путем выработки управляющего воздействия, соответствующего отклонению этой величины от заданного значения;
средства автоматического контроля, которые выполняют функции измерения и регистрации контролируемых параметров процесса, а также сигнализации о достижении этими параметрами установленных предельных значений;
системы оптимизации, автоматически определяющие и поддерживающие оптимальный режим протекания ТП.
Задача построения локальных систем управления ТП — первоэтапная в решении проблемы автоматизации управления сельскохозяйственным производством в целом.
На более высокой ступени находятся системы управления такими сложными ТП, которые характеризуются большим объемом перерабатываемой информации и не могут управляться автоматическим устройством без участия человека. В этом случае функции управления распределяются между человеком-оператором и вычислительной машиной, способной переработать практически неограниченный объем информации. Эту ступень автоматизированного управления называют АСУ ТП, и классифицированные ранее локальные системы управления входят в ее состав.
Использование ЭВМ в системе управления расширяет возможности осуществления сложных алгоритмов управления при большом числе переменных величин, характеризующих ход ТП Участие человека в сложной системе оперативного управления обеспечивает высокую эффективность и надежность функционирования последней, позволяет решить специальные проблемы интеллектуального свойства, возникающие из-за неполноты сведений об автоматизированном процессе.
Снижение стоимости и увеличение объемов выпуска микро-ЭВМ и микроконтроллеров изменило техническую базу автоматизации производства.
В общем виде микропроцессорное устройство, применяемое в системах управления, — это специализированное вычислительное устройство, приспособленное к работе в производственных условиях и включающее в себя, кроме собственно микропроцессора, также и средства для обмена сигналами с ОУ (измерительные контроллеры и интерфейсные блоки связи). При этом микропроцессор, выполненный на одной или нескольких больших интегральных схемах, предназначен для исполнения логических и арифметических операций по специальной программе, хранящейся в памяти устройства. МикроЭВМ — это комплектное устройство на базе микропроцессора, имеющее блоки памяти, ввода-вывода и сопряжения.
Структурная схема микропроцессорной системы управления на базе микроЭВМ показана на рисунке 1.4.
Алгоритмы управления реализованы в виде программ, хранящихся в памяти ЭВМ. Интерфейсные блоки служат для связи ЭВМ с ОУ (с исполнительными механизмами и регулирующими органами) и периферийным оборудованием (с пультом оператора, дисплеем). Пульт оператор использует для управления работой микроЭВМ, а дисплей — для предоставления ему информации о состоянии оборудования, контролируемых параметрах и других характеристиках автоматизированного процесса.
Сбор и преобразование в цифровую форму информации о ходе ТП, поступающей от разного рода измерительных преобразователей, осуществляются измерительными контроллерами. В состав интерфейсных блоков связи и контроллеров тоже могут входить микропроцессоры, выполняющие те операции по вводу-выводу и предварительной обработке информации, которые обычно выполняет центральный процессор.
При построении систем управления сложными объектами, имеющими ступенчатую (иерархическую) структуру, микропроцессорную систему управления низкого уровня связывают с вышерасположенной также через интерфейсные блоки связи.
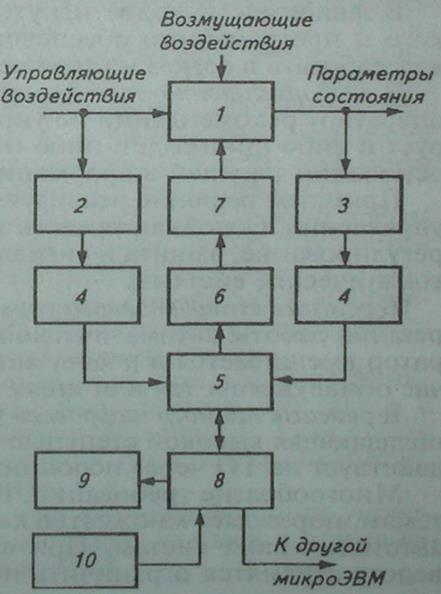
Рис. 1.4. Структурная схема микропроцессорной системы управления с микроЭВМ:
1 — технологический объект управления; 2 — измерительные преобразователи управляющих воздействий; 3 — измерительные преобразователи выходных параметров ОУ; 4 — измерительные контроллеры; 5 — управляющая МИКРОЭВМ; 6 — интерфейсные блоки связи с объектом; 7— исполнительные механизмы; 8 — интерфейсные блоки связи с периферией; 9 — дисплей; 10 — пульт оператора
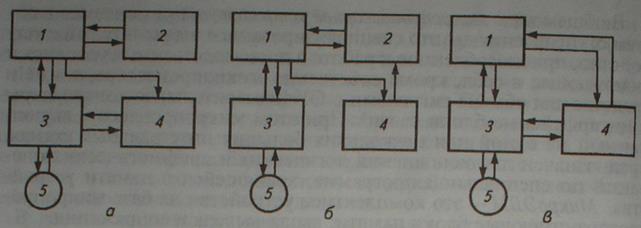
Рис. 1.5. Режим работы микроЭВМ в системах управления ТП:
а — информационно-советуюший режим; б — режим супервизорного управления; в — режим непосредственного цифрового управления; 1 — технологический объект управления; 2 — локальные автоматические системы; 3 — пункт контроля и управления; 4 — управляющая микроЭВМ; 5— оператор
Использование микроЭВМ в системах управления имеет ряд особенностей по сравнению с использованием ее в качестве универсальной ЭВМ, ориентированной прежде всего на взаимодействие с пользователем (человеком). Задача универсальных микроЭВМ — обработка данных по запросу пользователя, поэтому все устройства ввода-вывода информации (дисплеи, печатающие устройства, графопостроители, устройства внешней памяти и т.д.) подключаются к ЭВМ через свои блоки сопряжения по запросу пользователя.
В зависимости от достигнутого уровня совершенства технического и программного обеспечения управляющая микроЭВМ может работать в одном из трех режимов.
В информационно-советующем режиме (рис. 1.5, а) она выдает оператору рекомендации по управлению ТП, которые он анализирует и либо принимает, либо отвергает, выдавая свое решение на основании текущей информации и предыдущего опыта.
Принятое решение реализуют вручную, через пульт контроля и управления. Основная тяжесть задачи управления (автоматические регулирование, защита и сигнализация) ложится на локальные автоматические системы.
В режиме супервизорного управления (рис. 1.5, 6) контроль и коррекцию работы автоматической СУ выполняет микроЭВМ и оператор вмешивается в работу автоматических систем только в случае обнаружения тех или иных нарушений хода ТП.
В режиме прямого цифрового управления (рис. 1.5, в) микроЭВМ, обладающая высокой степенью надежности, непосредственно воздействует на ТП через исполнительные механизмы.
Многообразие требований, предъявляемых к техническим системам, порождает множество конструктивных решений элементов автоматических систем. При автоматизации конкретных производств стремятся ограничить номенклатуру используемых технических средств, которые выбирают прежде всего из числа стандартных и специализированных элементов, прошедших практическую проверку.
Многочисленность операций, выполняемых элементами автоматики (получение, усиление, преобразование входных сигналов, передача контрольной и исполнение командной информации, вычисление исходных сигналов по их дискретному представлению, распределение выходного сигнала по отдельным цепям его передачи и другие операции), требует ориентации на определенные типы функциональных блоков, объединяющих несколько элементов и удовлетворяющих комплексу общетехнических и специальных (технологических) требований.
Специальные (отраслевые) элементы и блоки автоматики предназначены для использования на конкретном оборудовании. Важное требование, предъявляемое к этим устройствам автоматики, — их универсальность, т. е. возможность применения в различных ТП и условиях эксплуатации.
Основой для применения одного и того же прибора или регулятора в различных автоматических системах с разными измерительными преобразователями (датчиками) служит идентичность параметров выходного электрического сигнала.
Существуют типовые измерительные преобразователи, позволяющие измерить и преобразовать в электрический сигнал практически любой технологический параметр. Это позволяет обходиться ограниченным числом преобразователей, регулирующих устройств и исполнительного механизма (ИМ) для автоматизации систем управления различного назначения.
В результате автоматизации ТП непосредственное участие человека в системе управления не является необходимым, тем более что технические средства превосходят человека по физическим характеристикам, по надежности работы при выполнении повторяющихся операций, возможности хранить информацию и т. д. В этой связи возможны несколько вариантов оперативного управления ТП.
Децентрализованный контроль и управление, при котором оператор выполняет все функции по обслуживанию локальных систем автоматического управления последовательно одного объекта за другим. Первичная информация, определяемая совокупностью значений переменных параметров процесса, образуется и представляется с помощью средств контрольно-измерительной техники.
Централизованный контроль и управление, при котором функции управления выполняет по-прежнему оператор, но теперь с рабочего места в центральном диспетчерском пункте, куда стекается информация о ходе ТП, прошедшая первичную обработку, селекцию, обобщение, сопоставление и т.д.
Автоматизированное управление, при котором функции управления в определенной степени осуществляет человек с применением развитых технических средств и ЭВМ.
Автоматическое управление, при котором роль оператора сводится только к наблюдению за работой системы, обслуживанию ЭВМ и изменению различных заданий по управлению ТП.
Дата добавления: 2015-07-14; просмотров: 3362;