СТРУКТУРА И ПРИНЦИПЫ УПРАВЛЕНИЯ ТЕХНОЛОГИЧЕСКИМИ ПРОЦЕССАМИ
В общем виде структура управления ТП показана на рисунке 2.2. если оператор — необходимая часть системы, то ее квалифицируют как автоматизированную, если нет —то как автоматическую.
Оператор действует в соответствии с целью управления, и его функции, в общем случае, очень обширны. К примеру, в обязанности оператора-животновода входят:
соблюдение распорядка дня содержания и режимов кормления животных;
получение информации от зооветслужбы о коррекции условий содержания, кормления и т.д.;
восприятие информации о поведении объекта управления (животных);
оценка и анализ технологической ситуации и выработка соответствующих решений;
установка задания системе управления, коррекция программ в соответствии с текущими условиями;
анализ информационных потоков о ходе ТП;
защита животных и оборудования в случае возникновения аварийной ситуации;
оперативная связь с вышестоящими органами управления, учет полученной продукции и т. д.
Все многообразие перечисленных задач, возникающих в ходе управления технологическим процессом, может быть классифицировано следующим образом.
Логическое управление применяют для управления поточно-транспортными линиями приготовления и раздачи корма, уборки навоза и т. д. в том случае, когда имеется необходимость обеспечения последовательности пуска, переключения и остановки механизмов, наличия блокировок, обеспечивающих нормальное функционирование ТП и защиту оборудования в аварийных ситуациях. Для логического управления важно знать состояние ТП в предшествующий момент времени.
Программное управление реализуется в разомкнутых системах автоматического управления. Управляемая величина изменяется по заранее заданной программе.
Например, норму жидкого корма, раздаваемого свиньям, устанавливают в зависимости от состояния животных и поедаемости корма и корректируют 1 раз в 10 сут. В отличие от принципа логического управления знание состояния ТП в предшествующий момент времени не обязательно.
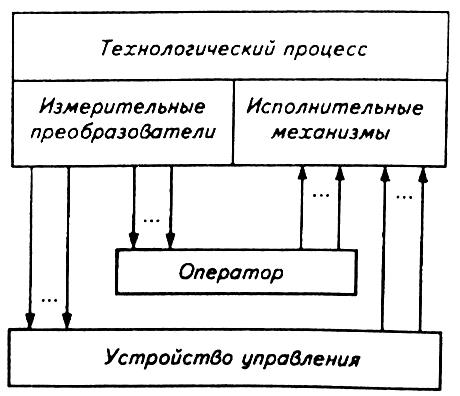
Рис. 2.2. Структурная схема управления ТП
Управление по отклонению используют в замкнутых автоматических СУ. Например, при регулировании уровня воды в баке водокачки неконтролируемые возмущения по нагрузке объекта (изменение расхода воды) или по каналу регулирующего воздействия (изменение подачи насоса) автоматически компенсируются в процессе стабилизации регулируемого параметра (уровня). Недостаток принципа управления по отклонению — низкие эксплуатационные характеристики в случае значительной инерционности объекта.
Управление по возмущению используют в разомкнутых автоматических СУ. Управляющее воздействие принимают исходя из анализа действующих на систему возмущений. Например, решение о загрузке бункера принимают по анализу расходования кормов в связи с тем, что непрерывный контроль уровня сыпучих материалов затруднен. Недостаток управления по возмущению — накопление ошибки регулирования.
Комбинированное управление представляет собой комбинацию принципов управления по отклонению и возмущению. Например, система управления обогревом свинарника включает в себя замкнутую автоматическую СУ температурой электрообогреваемого пола и разомкнутую систему включения инфракрасного обогрева в зависимости от температуры воздуха.
Все пять рассмотренных принципов управления могут быть осуществлены в системах:
местного управления (оператор следит за ходом ТП и управляет им, находясь рядом с технологической линией);
дистанционного управления (оператор следит за ходом ТП по мнемосхеме, при этом улучшаются условия его работы, но контроль за ходом процесса ухудшается);
централизованного управления (оператор следит за ходом ТП с центрального пульта, имеющего развитую систему контрольно-измерительных приборов, а возможно и ЭВМ в режиме оператора-советчика).
Дата добавления: 2015-07-14; просмотров: 4347;