Модели нелинейных систем управления
Нелинейными системами автоматического управления будем называть системы, которые содержат хотя бы один нелинейный элемент. Различают статические нелинейные элементы, математические модели которых можно представить в виде нелинейных статических характеристик (нелинейных алгебраических уравнений), и динамические, процессы в которых описывают нелинейные дифференциальные уравнения.
Основной математической моделью нелинейных звеньев и систем является нелинейное обыкновенное дифференциальное уравнение. В общем случае поведение многомерных систем описывают следующие уравнения состояния и выхода:
 (1)
(1)
где х. - n-мерный вектор состояния; u - r-мерный вектор управления,  ; у - l-мерный вектор выходных переменных; f(t,x,u) и g(t,x) - нелинейные вектор - функции. Зависимость этих функций от t отражает действие возмущений. Причем под возмущением понимают как влияние окружающей среды (сигнальное возмущение), так и изменение параметров самого объекта (параметрическое возмущение).
; у - l-мерный вектор выходных переменных; f(t,x,u) и g(t,x) - нелинейные вектор - функции. Зависимость этих функций от t отражает действие возмущений. Причем под возмущением понимают как влияние окружающей среды (сигнальное возмущение), так и изменение параметров самого объекта (параметрическое возмущение).
В частном случае управляющее воздействие может входить в уравнение состояния (1) в виде суммы с нелинейными коэффициентами
 (2)
(2)
где B(t,x) - матрица нелинейных коэффициентов размера  .
.
Систему, поведение которой описывают уравнения (2), будем называть нелинейной нестационарной системой с афинным управлением.
Если параметры системы с течением временем не меняются, а возмущающие воздействия пренебрежимо малы, то она называется нелинейной стационарной системой. Ее модель имеет вид
 (3)
(3)
В случае, когда отсутствует управляющее воздействие в (2) , система называется нелинейной нестационарной автономной и описывается уравнениями
 (4)
(4)
Если правая часть уравнений (4) не зависит от времени t, то мы будем говорить о нелинейной стационарной автономной системе.
Примеры нелинейных объектов управления.
Пример 1. Маятник.
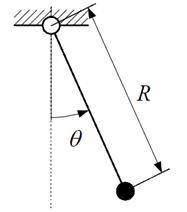
Рассмотрим маятник на рис. выше, динамика которого описывается нелинейным уравнением
 ,
,
где R-длина маятника, m- его масса, b- коэффициент вязкого трения в шарнире, g- ускорение силы тяжести, M –приложенный к маятнику момент. Обозначая  запишем уравнение маятника в переменных состояния
запишем уравнение маятника в переменных состояния
или
 ,
,
где
Пример 2. Два соединенных резервуара.
В качестве объекта управления рассмотрим два соединенных резервуара, в которых фактически можно измерить только уровень жидкости во втором резервуаре. Однако также нас интересует и оценка уровня жидкости в первом резервуаре. Схематическое изображение ОУ представлено на рис. ниже.
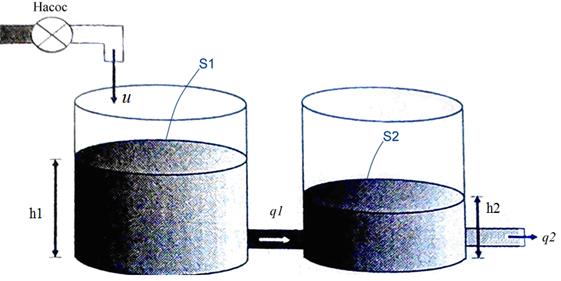
Вода течет в первый резервуар через насос со скоростью u, что влияет на уровень воды в резервуаре 1 (обозначенный черезh1). Вода вытекает из резервуара 1 в резервуар 2 со скоростью q1, воздействуя на уровни h1 и h2. Наконец, вода вытекает из резервуара 2 со скоростью q2.
Для данного процесса получены дифференциальные уравнения, которые связывают скорости потоков и уровни:
или
 , (9)
, (9)
где  площадь поперечного сечения баков 1 и 2 соответственно;
площадь поперечного сечения баков 1 и 2 соответственно;  объемная составляющая баков.
объемная составляющая баков.
Полагая  ,
,  =
=  ,
,  =
=  , получаем следующие выражения:
, получаем следующие выражения:

где  вектор состояния.
вектор состояния.
После подстановки всех данных в формулу (1), уравнения объекта управления принимают вид:
Как видим, порядок объекта управления равен 2, т.е. n=2.
Пример 3.
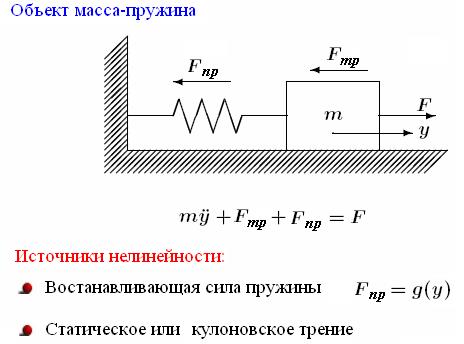
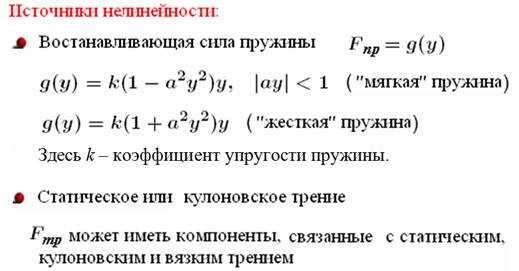

где h - коэффициент вязкого трения.
Вводя переменные состояния  и пренебрегая статическим трением, запишем уравнения объекта масса-пружина-трение в переменных состояния
и пренебрегая статическим трением, запишем уравнения объекта масса-пружина-трение в переменных состояния
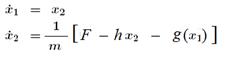
Если вязкое трение описывается нелинейным уравнением, то вместо  имеем, например,
имеем, например,  .
.
Дата добавления: 2015-08-14; просмотров: 2266;